一种竞拍场景下的动作识别与跟踪方法
1.本发明涉及计算机视觉领域,尤其涉及一种竞拍场景下的动作识别与跟踪方法。
技术背景
2.根据中国拍卖行业协会在京发布《中国拍卖行业发展报告(2018)》显示,2018年拍卖成交总额6787.84亿元,拍卖行业规模巨大。企业法人数量较去年同期增长5.52%,国家注册拍卖师数量较去年同期增长2%,拍卖师的增长速度跟不上规模的发展;同时拍卖现场人员多,拍卖金额大,拍卖成交速度快的环境导致拍卖师的工作量大、压力大,因此对辅助竞拍系统的需要越来越强烈。
3.而现有的视频监控系统不适用于这种频率低,动作速度快,遮挡现象较多的场景,且现有的视频监控系统对硬件设备的要求较高,设备费用昂贵。
技术实现要素:
4.发明目的:针对现有的市场需求与现有技术中存在的不足,以视觉图像处理为基础对竞拍场景下的动作进行识别与跟踪,基于竞拍场景独有的特点,对硬件设备,软件支持进行了综合的考虑,以期达到优化算法,降低对硬件设备要求的效果;竞拍场景具有人多,遮挡多,但人体位置变化小的特点;本发明综合考虑了上述特点,提供了一种竞拍场景下的动作识别与跟踪方法;包括:获取人体骨骼数据;简化关节点间角度特征;对关节点进行重要性排序分配不同权重并对关节点进行异步跟踪;计算关节点的空间距离进行平面映射并将高度宽度距离转为与自身上半身的比值对动作进行二次验证;对分类好的角度特征,距离特征基于逻辑回归进行训练,得到竞拍动作的阈值;最后根据时域特征来进一步对竞拍动作进行识别与确认;本发明在相同的硬件资源下提高了识别的速度与准确性。
5.本发明的在监控场景下基于特定目标跟踪的卷积神经网络的人体动作进行识别,便于管理人员提前锁定竞拍意愿者,对视频监控画面中的行为进行自动检测与预判,可提高工作效率的辅助系统;同时以公共大屏幕为载体,增强竞拍的公平性与透明度。
6.技术方案:一种竞拍场景下的动作识别与跟踪方法,包括:
7.步骤s1:对竞拍空间进行区域划分,使用多摄像头对其分配区域进行人体关节点数据的获取,确定每个人的关节点的位置,将空间的3维坐标映射为2维坐标即忽略位置偏差量较小的深度信息;
8.步骤s2:基于关节点数据信息,计算左右臂各3个关节点形成的角度,形成角度特征;
9.步骤s3:基于关节点的重要性排序,为关节点分配不同权重并对关节点进行异步跟踪。先跟踪手臂上的关节点,手臂上关节点为识别动作的主要因素,若出现手臂被遮挡现象,则再跟踪脸部关节点,最后跟踪下肢关节点,以这些关节点信息增强手臂关节点处信息的可靠性;
10.步骤s4:基于角度特征对预先获取的训练样本集进行训练,获得竞拍动作角度阈
值;
11.步骤s5:在竞拍动作的后期,基于时域特征,连续十帧保持一定角度,对动作识别可信度进行加权;
12.步骤s6:在竞拍动作的后期,基于部分关节点间高度宽度的距离与自身上半身的比值作为训练数据,获得竞拍动作的距离阈值。此步骤不与步骤s4同步,意在作为竞拍动作判定的第二步验证环节,可以用少量的计算量换取较大的准确度的提高;
13.步骤s7:基于逻辑回归算法和所述的角度,距离特征,形成特定动作分类器。
14.步骤s8:对竞拍的速度进行比较,判定竞拍者的优先级。
15.进一步的,步骤s1中,根据竞拍实际空间的排布,对摄像头进行区域划分。保证多摄像头协同工作时,监控区域视频有最高清晰度且无监控盲区。
16.进一步的,步骤s2中,单臂角度计算公式为:
[0017][0018]
其中,关节点包括a、b、c三点,其中关节点a的实际坐标为(x1,y1),关节点b的实际坐标为(x2,y2),关节点c的实际坐标为(x3,y3);a表示关节点a和关节点b之间的线段,b表示关节点b和关节点c之间的线段,c表示关节点a和关节点c之间的线段,φ为ac与bc之间的夹角。
[0019]
进一步的,步骤s3具体包括:
[0020]
步骤s4.1:首先仅跟踪手臂关节点,以减少数据运算量,提高识别效率;
[0021]
步骤s4.2:若出现遮挡现象,则再跟踪脸部关节点,以提高手臂关节点信息的可靠性;
[0022]
进一步的,步骤s4中,获取竞拍动作阈值,将n个竞拍动作化为n个阈值并形成2个分类器(1竞拍,2其他动作)。
[0023]
进一步的,步骤s6中,因为同一人物在摄像中会随着两者距离变化导致映射的坐标值不同,影响高度宽度的精确获取,故以其自身作为参照,将基于关键的关节点间高度宽度的距离与自身上半身的比值作为判断识别动作的一个标准。
[0024]
进一步的,步骤s8中,因为使用了多摄像头,多处理器,为了保证时间的统一,全部以关键词语言作为计时器的激活方式,并在最后每个处理器统计出竞拍总共用时,来确定竞拍者的优先级。
[0025]
与现有技术相比,提供了一种竞拍场景下的动作识别与跟踪方法,具有如下有益效果:便于管理人员提前锁定竞拍意愿者,对视频监控画面中的行为进行自动检测与预判,可提高工作效率的辅助系统;同时以公共大屏幕为载体,增强竞拍的公平性与透明度;本方法计算量小、时效性高、所需训练数据量小、在多人、遮挡环境下受影响小的优点。
附图说明
[0026]
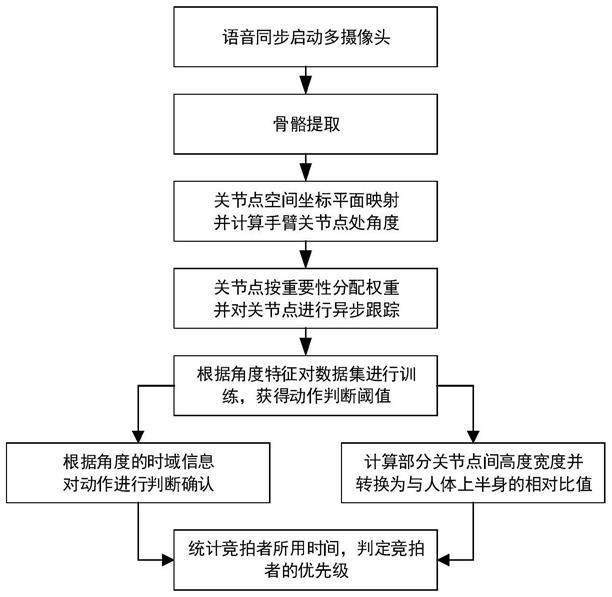
图1为一种竞拍动作识别方法的流程图;
[0027]
图2为竞拍场景下多摄像头的布置示意图;
[0028]
图3为获取的人体关节点位置信息表示的人体骨架模型示意图;
[0029]
图4为两种典型竞拍动作示意图。
具体实施方式
[0030]
如图1
‑
4所示,一种竞拍场景下的动作识别与跟踪方法,包括:
[0031]
步骤s1:对竞拍空间进行区域划分,使用多摄像头对其分配区域进行人体关节点数据的获取,确定每个人的关节点的位置,将空间的3维坐标映射为2维坐标即忽略位置偏差量较小的深度信息;
[0032]
步骤s2:基于关节点数据信息,计算左右臂各3个关节点形成的角度,形成角度特征;
[0033]
步骤s3:基于关节点的重要性排序,为关节点分配不同权重并对关节点进行异步跟踪;先跟踪手臂上的关节点,手臂上关节点为识别动作的主要因素,若出现手臂被遮挡现象再跟踪脸部关节点,最后跟踪下肢关节点,以这些关节点信息增强手臂关节点处信息的可靠性;
[0034]
步骤s4:基于角度特征对预先获取的训练样本集进行训练,获得竞拍动作角度阈值;
[0035]
步骤s5:在竞拍动作的后期,基于时域特征,连续十帧保持一定角度,对动作识别可信度进行加权;
[0036]
步骤s6:在竞拍动作的后期,基于部分关节点间高度宽度的距离与自身上半身的比值作为训练数据,获得竞拍动作的距离阈值;此步骤不与步骤s4同步,意在作为竞拍动作判定的第二步验证环节,可以用少量的计算量换取较大的准确度的提高;
[0037]
步骤s7:基于逻辑回归算法和所述的角度,距离特征,形成特定动作分类器。
[0038]
步骤s8:对竞拍的速度进行比较,判定竞拍者的优先级。
[0039]
在步骤s1中,根据竞拍实际空间的排布,对摄像头进行区域划分。保证多摄像头协同工作时,监控区域视频有最高清晰度且无监控盲区。
[0040]
在步骤s2中,单臂角度计算公式为:
[0041][0042]
其中,关节点包括a、b、c三点,其中关节点a的实际坐标为(x1,y1),关节点b的实际坐标为(x2,y2),关节点c的实际坐标为(x3,y3);a表示关节点a和关节点b之间的线段,b表示关节点b和关节点c之间的线段,c表示关节点a和关节点c之间的线段,φ为ac与bc之间的夹角。
[0043]
在步骤s3具体包括:
[0044]
步骤s4.1:首先仅跟踪手臂关节点,以减少数据运算量,提高识别效率;
[0045]
步骤s4.2:若出现遮挡现象,则再跟踪脸部关节点,以提高手臂关节点信息的可靠性;
[0046]
在步骤s4中,获取竞拍动作阈值,将n个竞拍动作化为n个阈值并形成2个分类器(1竞拍,2其他动作)。通过用openpose工具箱可以提取25个关节点,这些关节点对竞拍动作的重要性是不同的,所以在无遮挡的情况下只跟踪手臂处的6个关节点就能判断是否有竞拍动作发生。但是存在部分遮挡时这些关节点被遮挡,就需要用脸部和下肢的关节点去验证预估的手部关节点的位置的可信度。当遮挡消失时,竞拍动作又可以被很好的识别出来。
[0047]
在步骤s6中,因为同一人物在摄像中会随着两者距离变化导致映射的坐标值不
同,影响高度宽度的精确获取,故以其自身作为参照,将基于关键的关节点间高度宽度的距离与自身上半身的比值作为判断识别动作的一个标准。
[0048]
在步骤s8中,因为使用了多摄像头,多处理器,为了保证时间的统一,全部以关键词语言作为计时器的激活方式,并在最后每个处理器统计出竞拍总共用时,来确定竞拍者的优先级。
[0049]
以上所述是本发明的实施方式和效果展示,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1