带条栅视力检测的视网膜刺激器的制作方法
带条栅视力检测的视网膜刺激器
1.本技术是申请日为2020年04月01日、申请号为2020102514518、发明名称为视网膜刺激器的条栅视力的检测方法的专利申请的分案申请。
技术领域
2.本公开具体涉及一种带条栅视力检测的视网膜刺激器。
背景技术:
3.视网膜疾病例如rp(视网膜色素变性)、amd(与老年有关的黄斑变性)等是重要的致盲性疾病,患者因感光通路受阻而导致视觉下降或致盲。随着技术的研究和发展,出现了使用视网膜刺激器等来修复上述视网膜疾病的技术手段。现有的视网膜刺激器一般包括布置在患者体外的摄像装置、图像处理装置和放置在患者的眼球内植入体(也称“植入装置”)。其中,体外的摄像装置捕捉外界的图像获得图像信号,图像处理装置对图像信号进行处理并将处理后的图像信号(也称“视觉信号”)发送给植入体。植入体进一步将这些图像信号转化成电刺激信号,以刺激视网膜上的神经节细胞或双极细胞,从而给患者产生光感。
4.在现有技术中,通常使用条栅视力作为视网膜刺激器的主要评价指标。然而,由于图像处理装置通常是直接通过压缩的方法对图像信号进行处理,因此使得视网膜刺激器难以识别需要较高视力需求例如小于最小分辨视角的对数为2.3的条栅视力图像。现有的图像处理装置是对图像信号进行压缩。
技术实现要素:
5.本公开是有鉴于上述的状况而提出的,其目的在于提供一种能够有效识别条栅视力图像并具有较小运算量的视网膜刺激器的条栅视力的检测方法。
6.为此,本公开提供了一种视网膜刺激器的条栅视力的检测方法,所述视网膜刺激器包括位于体外的摄像装置,其特征在于,包括以下步骤:(a)利用所述摄像装置获取初始图像;(b)对所述初始图像进行灰度化处理获得灰度图像,根据所述灰度图像获得所述灰度图像的像素分布的直方图,根据所述灰度图像和所述直方图获得所述灰度图像的特征信息;(c)根据所述特征信息和第一类预定阈值判断所述灰度图像是否为条栅视力图像;(d)若所述灰度图像为所述条栅视力图像,则对所述灰度图像进行二值化处理获得二值图像;(e)从所述二值图像选出目标像素值,根据设置于所述二值图像中的多条预定映射线的垂直方向上是否存在用于投影的所述目标像素值,获得各条预定映射线上具有所述目标像素值投影的对应像素点的数量;并且(f)根据所述各条预定映射线上的所述目标像素值投影的对应像素点的数量和第二类预定阈值确定目标预定映射线,从而确定所述二值图像上的条栅方向,其中,所述二值图像上的条栅方向垂直于所述目标预定映射线的方向。
7.在本公开中,视网膜刺激器利用摄像装置获取初始图像,对初始图像进行灰度化处理获得灰度图像,基于灰度图像获得该灰度图像的直方图,基于灰度图像和直方图获得该灰度图像的特征信息,进而基于第一类预定阈值判断灰度图像是否为条栅视力图像。若
灰度图像是条栅视力图像,则对灰度图像进行二值化处理获得二值图像,基于二值图像和多条预定映射线获得各条预定映射线上具有目标像素值投影的对应像素点的数量,基于各条预定映射线上具有目标像素值投影的对应像素点的数量和第二类预定阈值确定目标预定映射线,从而确定二值图像上的条栅方向。由此能够有效识别条栅视力图像,并具有较小运算量。
8.本公开所涉及的检测方法中,可选地,所述特征信息包括第一像素数量、灰度均值和根据所述灰度图像获得的区域质心坐标,其中,所述第一像素数量是基于所述直方图获得的所述灰度图像中灰度值在各个像素区间内的像素的数量,所述灰度均值是所述灰度图像的所有像素的灰度值的平均值。由此能够获得灰度图像的特征信息。
9.本公开所涉及的检测方法中,可选地,所述特征信息还包括第二像素数量,其中,所述第二像素数量为所述灰度图像中灰度值小于所述灰度均值的像素的数量和/或灰度值大于所述灰度均值的像素的数量。由此能够获得第二像素数量。
10.本公开所涉及的检测方法中,可选地,像素区间包括黑像素区间、白像素区间和多个其他像素区间,所述特征信息包括所述黑像素区间的像素的数量与所述白像素区间的像素的数量的差和和,以及所述多个其他像素区间的像素的数量的和,其中,所述黑像素区间包括灰度值为0~50的像素,所述白像素区间包括灰度值为201~255的像素。由此能够获得灰度图像的特征信息。
11.本公开所涉及的检测方法中,可选地,所述特征信息包括所述第一像素数量、所述灰度均值、所述区域质心坐标和所述第二像素数量,所述第一类预定阈值具有与各类特征信息相对应的阈值范围。由此能够将第一类预定阈值和特征信息进行对应的比较。
12.本公开所涉及的检测方法中,可选地,所述条栅视力图像的条栅方向选自水平方向、竖直方向、与所述水平方向之间的夹角为45
°
的第一方向和与所述水平方向之间的夹角为135
°
的第二方向中的一种。由此能够便于后续确定条栅视力图像的条栅方向。
13.本公开所涉及的检测方法中,可选地,所述各条预定映射线从所述二值图像的一侧到所述二值图像的另一侧,所述各条预定映射线的方向分别为水平方向、竖直方向、与所述水平方向之间的夹角为45
°
的第一方向和与所述水平方向之间的夹角为135
°
的第二方向。由此能够便于确定预定映射线。
14.本公开所涉及的检测方法中,可选地,所述目标像素值为所述二值图像中的最小灰度值。由此能够从二值图像中选出目标像素值。
15.本公开所涉及的检测方法中,可选地,在步骤(f)中,通过各条预定映射线上的所述目标像素值投影的对应像素点的数量与所述第二类预定阈值比较来判断所述各条预定映射线上的对应像素点是否连续,进而确定所述目标预定映射线。由此能够确定目标预定映射线。
16.本公开所涉及的检测方法中,可选地,在步骤(e)之前,还对所述二值图像进行膨胀和腐蚀处理。由此能够便于后续对条栅视力图像中条栅方向进行识别。
17.根据本公开所涉及的检测方法,能够有效识别条栅视力图像并具有较小运算量。
附图说明
18.图1是示出了本公开的示例所涉及的视网膜刺激器的结构示意图。
19.图2是示出了本公开的示例所涉及的视网膜刺激器的条栅视力的检测方法的流程示意图。
20.图3是示出了本公开的示例所涉及的视网膜刺激器的条栅视力的检测方法的灰度图像和直方图示意图。
21.图4是示出了本公开的示例所涉及的视网膜刺激器的条栅视力的检测方法的应用示意图。
22.图5是示出了本公开的示例所涉及的方向模板示意图。
23.图6是示出了本公开的示例所涉及的刺激电极阵列的配置位置示意图。
具体实施方式
24.以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
25.本公开提供一种条栅视力的检测方法。在本公开中,能够有效地识别条栅视力图像并具有较小的运算量。以下结合附图进行详细描述本公开。
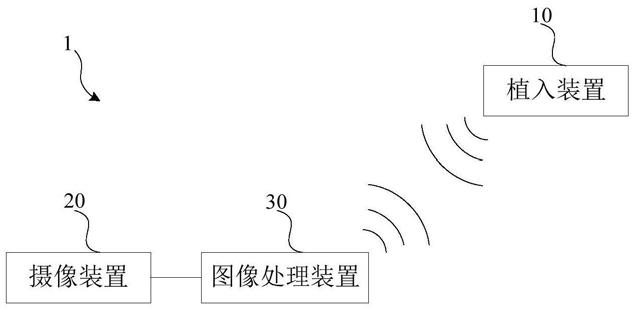
26.图1是示出了本公开的示例所涉及的视网膜刺激器1的结构示意图。本公开所涉及的视网膜刺激器1例如可以特别适用于视网膜病变而导致失明,但双极细胞、神经节细胞等视觉通路保留完好的患者。在本公开中,视网膜刺激器1有时也称为“人工视网膜”、“人造视网膜”、“人工视网膜系统”、“人造视网膜系统”等。
27.在一些示例中,如图1所示,视网膜刺激器1可以包括植入装置10、摄像装置20和图像处理装置30。植入装置10可以接收视觉信号并基于视觉信号产生电刺激信号,以使患者产生光感。其中,视觉信号可以由摄像装置20采集,并经由图像处理装置30处理获得。
28.在一些示例中,植入装置10可以包括刺激电极阵列11(参见图6)。刺激电极阵列11可以包括规定个数的刺激电极(有时也称“电极”)例如图6中的刺激电极101、刺激电极102和刺激电极103等。刺激电极可以根据视觉信号产生电刺激信号。具体而言,植入装置10可以接收视觉信号,并且刺激电极可以将所接收的视觉信号转换成作为电刺激信号的双向脉冲电流信号,从而对视网膜的神经节细胞或双极细胞发放双向脉冲电流信号来产生光感。另外,植入装置10可以植入人体例如眼球内。在一些示例中,图像处理装置30可以具有用于发射视觉信号的发射天线,植入装置10可以具有用于接收视觉信号的接收天线。
29.在一些示例中,植入装置10接收的视觉信号可以由摄像装置20和图像处理装置30进行采集并处理得到。
30.在一些示例中,摄像装置20可以用于捕获图像,并将捕获的图像转换成视觉信号。例如,摄像装置20可以捕获患者所处环境的图像。
31.在一些示例中,摄像装置20可以为具有摄像功能的设备,例如摄像机、照相机等。为了方便使用,可以将体积较小的摄像机设计在(例如嵌入到)眼镜上。
32.在另一些示例中,患者也可以通过佩戴轻便的具有摄像功能的眼镜作为摄像装置20来捕获图像。摄像装置20也可以用谷歌眼镜等来实现。另外,摄像装置20可以装配在例如智能眼镜、智能头戴、智能手环等智能可穿戴设备上。
33.在一些示例中,图像处理装置30可以接收摄像装置20生成的视觉信号。图像处理
装置30可以对视觉信号进行处理并经由发射天线发送至植入装置10。
34.在一些示例中,图像处理装置30可以与摄像装置20连接。摄像装置20与图像处理装置30之间的连接可以是有线连接,也可以是无线连接。其中,有线连接可以是数据线连接,无线连接可以是蓝牙连接,wifi连接、红外连接、nfc连接或射频连接等。
35.在一些示例中,摄像装置20和图像处理装置30可以配置在患者体外。例如,患者可以将摄像装置20佩戴在眼镜上。患者还可以将摄像装置20佩戴在例如头饰、发带或胸针等可穿戴的配饰上。另外,患者可以将图像处理装置30佩戴在腰部,患者还可以将图像处理装置30佩戴在例如胳膊、腿部等部位。本公开的示例不限于此,例如,患者还可以将图像处理装置30放置在例如随身携带的手提包或背包中。
36.以下,结合附图详细说明视网膜刺激器1的条栅视力的检测方法的过程。图2是示出了本公开的示例所涉及的视网膜刺激器1的条栅视力的检测方法的流程示意图。图3是示出了本公开的示例所涉及的视网膜刺激器1的条栅视力的检测方法的灰度图像和直方图示意图。
37.在本实施方式中,如图2所示,视网膜刺激器1的条栅视力的检测方法,包括以下步骤:(a)利用摄像装置20获取初始图像(步骤s10);(b)对初始图像进行灰度化处理获得灰度图像,根据灰度图像获得灰度图像的像素分布的直方图,根据灰度图像和直方图获得灰度图像的特征信息(步骤s20);(c)根据特征信息和第一类预定阈值判断灰度图像是否为条栅视力图像(步骤s30);(d)若灰度图像为条栅视力图像,则对灰度图像进行二值化处理获得二值图像(步骤s40);(e)从二值图像选出目标像素值,根据设置于二值图像中的多条预定映射线的垂直方向上是否存在用于投影的目标像素值,获得各条预定映射线上具有目标像素值投影的对应像素点的数量(步骤s50);(f)根据各条预定映射线上的目标像素值投影的对应像素点的数量和第二类预定阈值确定目标预定映射线,从而确定二值图像上的条栅方向,其中,二值图像上的条栅方向垂直于目标预定映射线的方向(步骤s60)。
38.在本公开中,视网膜刺激器1可以利用摄像装置20获取初始图像,对初始图像进行灰度化处理获得灰度图像,基于灰度图像获得该灰度图像的直方图,基于灰度图像和直方图获得该灰度图像的特征信息,进而基于第一类预定阈值判断灰度图像是否为条栅视力图像。若灰度图像是条栅视力图像,则对灰度图像进行二值化处理获得二值图像,基于二值图像和多条预定映射线获得各条预定映射线上具有目标像素值投影的对应像素点的数量,基于各条预定映射线上具有目标像素值投影的对应像素点的数量和第二类预定阈值确定目标预定映射线,从而确定二值图像上的条栅方向。由此能够有效识别条栅视力图像,并具有较小运算量。
39.在步骤s10中,可以利用摄像装置20获取初始图像。在一些示例中,初始图像例如是患者所处的外部环境,例如生活场景、交通场景等。通过摄像装置20对外部环境进行拍摄,可以捕获到所需的初始图像。在另一些示例中,摄像装置20可以每隔预设时间t捕获一张初始图像。在本实施方式中,初始图像也可以是用于评价视网膜刺激器1的条栅视力图像。
40.在本实施方式中,初始图像的像素数可以为例如30万、100万、200万、500万、1200万等,但本实施方式不限于此。
41.在一些示例中,初始图像可以是摄像装置20拍摄的未经过任何处理的图像。通常,
由摄像装置20拍摄周围环境所得到的初始图像是彩色图像。也即,摄像装置20拍摄的未经过任何处理的初始图像可以是彩色图像。在一些示例中,彩色图像可以为hsi图像。彩色图像还可以为rgb图像。但本公开的示例不限于此,摄像装置20拍摄到的初始图像可以是灰度图像或二值图像等。
42.在一些示例中,初始图像可以是患者所处的外部环境,其中出现的物体或障碍物是患者主要关注的信息,特别是识别出物体或障碍物的轮廓有利于盲人或低视力患者的行动。彩色图像中的颜色特征等信息并非均可用于反映初始图像中物体的形态特征,因此,即使去除彩色图像的部分上述信息也能够比较好地保留物体或障碍物的轮廓。在本实施方式中,初始图像也可以是条栅视力图像,而识别出条栅视力图像的条栅方向是患者主要关注的信息。彩色图像中的颜色特征等信息并非均可用于反映初始图像中条栅的形态(例如条栅的宽窄,即对应的最小分辨视角的对数不同)和方向等信息,因此,即使去除彩色图像的部分上述信息也能够比较好地保留条栅的形态和方向。
43.在一些示例中,步骤s20~步骤s60可以在图像处理装置30中进行。
44.在步骤s20中,可以对初始图像进行灰度化处理获得灰度图像,根据灰度图像获得灰度图像的像素分布的直方图,根据灰度图像和直方图获得灰度图像的特征信息。
45.在一些示例中,在步骤s20中,可以对初始图像进行灰度化处理获得灰度图像(参见图3(a))。在一些示例中,灰度图像可以是r、g、b三个分量的大小相同(即r=g=b的值)的一种特殊的彩色图像,比普通彩色图像的信息量少。灰度图像的每个像素存在相应的灰度值。在一些示例中,每个灰度值可以采用例如8位二进制数表示,即灰度图像的灰度值的范围为0
‑
255。在另一些示例中,每个灰度值也可以采用例如16位二进制数表示,另外,也可以采用例如24位及以上二进制数表示。
46.在一些示例中,步骤s20中的灰度化处理主要对初始图像的色彩信息进行处理,对色彩信息外的初始图像信息并未改变。在这种情况下,灰度化处理可以减小后续处理的运算量,有助于后续识别初始图像是否为条栅视力图像。
47.在一些示例中,灰度化处理方法可以是分量法,即可以选择r、g、b三个分量中的任意一个分量的值作为灰度值。例如,对于初始图像中的一个像素而言,若r=70、g=110、b=150,则可以选择例如70作为该像素的灰度值,即设置r=g=b=70作为该像素的灰度值;也可以选择例如110作为该像素的灰度值,也可以选择例如150作为该像素的灰度值。在这种情况下,依次对初始图像中的各像素进行处理可以获得灰度图像。
48.另外,在一些示例中,灰度化处理方法还可以是最大值法,即可以选择r、g、b三个分量中的最大值作为灰度值。例如,对于初始图像中的一个像素而言,若r=70、g=110、b=150,则可以选择例如150作为该像素的灰度值。在这种情况下,依次对初始图像中的各像素进行处理可以获得灰度图像。
49.另外,在一些示例中,灰度化处理方法还可以是平均值法,即可以选择r、g、b三个分量中的平均值作为灰度值。例如,对于初始图像中的一个像素而言,若r=70、g=110、b=150,则r、g、b三个值的平均值是110,可以选择110作为该像素的灰度值。在这种情况下,依次对初始图像中的各像素进行处理可以获得灰度图像。
50.此外,在一些示例中,灰度化处理方法还可以是加权法,即可以将r、g、b三个分量按照不同的加权系数进行加权计算得到灰度值。例如,对于初始图像中的一个像素而言,若
r=70、g=110、b=150,可以设置r的加权系数为0.3、g的加权系数为0.5、b的加权系数为0.2,则该像素的灰度值为0.3*70+0.5*110+0.2*150=106。在这种情况下,依次对初始图像中的各像素进行处理可以获得灰度图像。
51.在上述示例中,灰度化处理能够减少初始图像的数据量(或信息量),方便对图像的后续处理,有助于后续识别初始图像是否为条栅视力图像。
52.在一些示例中,如图3所示,步骤s20中可以根据灰度图像获得灰度图像的像素分布的直方图。在一些示例中,如图3(a)和图3(c)所示,可以利用matlab处理获得该灰度图像的直方图。在一些示例中,如图3(b)和图3(d)所示,可以先将灰度图像进行“田字格”划分,然后再基于划分后的灰度图像获得直方图。
53.在一些示例中,步骤s20中可以根据灰度图像和直方图获得灰度图像的特征信息。在一些示例中,可以基于特征信息来判断该灰度图像(或初始图像)是否为条栅视力图像(稍后描述)。
54.在一些示例中,特征信息可以包括第一像素数量、灰度均值和根据灰度图像获得的区域质心坐标,其中,第一像素数量是基于直方图获得的灰度图像中灰度值在各个像素区间内的像素的数量,灰度均值是灰度图像的所有像素对应的灰度值的平均值。由此能够获得灰度图像的特征信息。
55.在一些示例中,第一像素数量可以是灰度图像中灰度值在各个像素区间内的像素的数量,也就是说,可以将利用灰度值划分若干个像素区间,然后利用直方图统计各个像素区间的数量,例如,利用灰度值划分5个像素区间,其中,第一像素区间(也称“黑像素区间”)可以包括灰度值为0~50的像素,第二像素区间可以包括灰度值为51~100的像素,第三像素区间可以包括灰度值为101~150的像素,第四像素区间可以包括灰度值为151~200的像素,第五像素区间(也称“白像素区间”)可以包括灰度值为201~255的像素,然后利用直方图统计出各个像素区间中对应的像素的数量。
56.在一些示例中,如上,像素区间可以包括黑像素区间、白像素区间和多个其他像素区间。在一些示例中,特征信息也可以包括基于直方图和划分好的像素区间获得的衍生特征信息。在一些示例中,衍生特征信息可以是黑像素区间对应的像素的数量与白像素区间对应的像素的数量的差和和,以及多个其他像素区间的像素的数量的和,其中,黑像素区间(即“第一像素区间”)包括灰度值为0~50的像素,白像素区间(即“第五像素区间”)包括灰度值为201~255的像素。由此能够获得灰度图像的特征信息。
57.在一些示例中,特征信息还包括第二像素数量,其中,第二像素数量为灰度图像中灰度值小于灰度均值的像素的数量和/或灰度值大于灰度均值的像素的数量。由此能够获得第二像素数量。具体而言,可以基于灰度图像获得灰度图像的灰度均值,也即灰度图像的所有像素对应的灰度值的平均值,可以统计灰度图像中灰度值大于灰度均值的像素的数量,也可以统计灰度图像中灰度值小于灰度均值的像素的数量。第二像素数量可以包括灰度图像中灰度值大于灰度图像的灰度均值的像素的数量,也可以包括灰度图像中灰度值小于灰度均值的像素的数量。
58.在一些示例中,步骤s20中特征信息可以包括根据灰度图像获得的区域质心坐标。具体而言,可以先将灰度图像进行二值化处理,然后再将处理后的灰度图像经过区域质心模块(例如可以是预先设定好的图像处理程序)获得该灰度图像对应的区域质心坐标。
59.如上,在步骤s20中,可以获得灰度图像的特征信息,由此能够在后续过程中基于获得的特征信息判断该灰度图像是否为条栅视力图像。
60.在步骤s30中,可以根据特征信息和第一类预定阈值判断灰度图像是否为条栅视力图像。具体而言,可以根据步骤s20中的特征信息和第一类预定阈值进行比较,由此能够判断出该灰度图像是否为条栅视力图像。
61.在一些示例中,步骤s20获得的特征信息可以包括第一像素数量、灰度均值和区域质心坐标。在另一些示例中,步骤s20获得的特征信息也可以包括衍生特征信息和/或第二像素数量。在这种情况下,在步骤s20中获得的特征信息包含的具体内容可能会存在差异,因此第一类预定阈值包含的内容也可以是改变的。在一些示例中,特征信息包括第一像素数量、灰度均值、区域质心坐标和第二像素数量,第一类预定阈值具有与各类特征信息相对应的阈值范围。由此能够将第一类预定阈值和特征信息进行对应的比较。在一些示例中,第一类预定阈值可以是基于图像数据库获得的。具体而言,第一类预定阈值可以通过对图像数据库中的图像进行分析获得,并且获得的第一类预定阈值可以和步骤s20中获得的各类特征信息相对应。
62.在一些示例中,图像数据库的图像可以包含不同方向、形态(例如条栅的宽窄,即对应的最小分辨视角的对数不同)的条栅视力图像,以及非条栅视力图像(例如容易与条栅视力图像混淆的数字图像、窗口图像与日常生活图像等),通过对图像数据库中的图像进行分析,例如可以获得图像数据库中的图像各自对应的直方图、灰度均值和区域质心坐标等,可以通过统计获得条栅视力图像与其他图像具有的不同的独特特征,独特特征可以参见步骤s20中获得的特征信息,也即可以通过统计获得条栅视力图像区别于其他图像并对应于各类特征信息的各个阈值范围,其中,第一类预定阈值可以为各个阈值范围,由此第一类预定阈值具有与各类特征信息相对应的阈值范围。在这种情况下,可以通过判断步骤s20中获得的各类特征信息是否在第一类预定阈值中相应的阈值范围内,来确定灰度图像是否为条栅视力图像。
63.在一些示例中,第一类预定阈值可以在其他设备中获得,在步骤s30中可以将特征信息与预先设定好的第一类预定阈值进行比较。由此能够减少运算量。在一些示例中,图像数据库中的图像的大小可以和灰度图像的大小相同,例如,若灰度图像的大小为160*120,则图像数据库的图像的大小也为160*120。在一些示例中,可以通过对图像数据库中的图像进行和灰度图像相同的处理获得第一类预定阈值。在这种情况下,能够使基于图像数据库获得的第一类预定阈值对步骤s20中获得的特征信息是有效的。
64.在一些示例中,第一类预定阈值可以和步骤s20中的特征信息相对应。例如,在步骤s20中获得的特征信息可以包括第一像素数量、灰度均值和区域质心坐标,通过图像数据库的图像分析统计获得的第一类预定阈值可以包括条栅视力图像具备的独特特征,即与第一像素数量、灰度均值和区域质心坐标对应的阈值范围,可以通过判断各类特征信息是否在第一类预定阈值中相应的阈值范围内,也即判断特征信息是否一一对应的在第一类预定阈值对应的阈值范围内,具体而言,通过分别判断特征信息中的第一像素数量是否在第一类预定阈值中与第一像素数量对应的阈值范围中,特征信息中的灰度均值是否在第一类预定阈值中与灰度均值对应的阈值范围中和特征信息中的灰度均值是否在第一类预定阈值中与灰度均值对应的阈值范围中,若第一像素数量、灰度均值和区域质心坐标均在各自对
应的阈值范围中,则灰度图像是条栅视力图像。若在步骤s20中获得的特征信息还包括衍生特征信息,则获得的第一类预定阈值可以包括基于图像数据库中的图像获得条栅视力图像具备的独特的衍生特征信息。
65.在一些示例中,若步骤s20中获得的各类特征信息在第一类预定阈值中相应的阈值范围内,则确定灰度图像为条栅视力图像,否则灰度图像不是条栅视力图像。在一些示例中,若灰度图像是条栅视力图像,则可以继续执行步骤s40,若灰度图像不是条栅视力图像,则该视网膜刺激器1可以采用其他方式(例如压缩、二值化等方式)对初始图像进行处理,并通过刺激电极阵列11刺激视网膜,使患者能够获得该初始图像中的物体的轮廓等信息(未详细描述)。由此能够将条栅视力图像与其他非条栅视力图像(例如日常生活图像等)区分开来,进行不同的处理,由此能够使视网膜刺激器1更好地应对不同的图像,使视网膜刺激器1能够更好地识别条栅视力图像。
66.在步骤s40中,若灰度图像为条栅视力图像,则可以对灰度图像进行二值化处理获得二值图像。在一些示例中,二值化处理可以包括比较灰度图像中的每个像素的灰度值与预设灰度值的大小。可将灰度图像中的灰度值设为两类,分别是最大灰度值和最小灰度值,更改灰度值后,即可得到二值图像。在一些示例中,预设灰度值可以由相关人员自行设定或者由所用软件的相关算法确定。
67.在一些示例中,可以对获得的二值图像进行优化处理。由此能够便于后续对条栅视力图像中条栅方向进行识别。在一些示例中,可以通过调整(例如增大)二值化阈值获得更加合适的二值图像。
68.在一些示例中,可以通过加入形态学算法对二值化图像进行优化。在一些示例中,在步骤s50之前,还对二值图像进行膨胀和腐蚀处理。例如,可以通过先对二值化图像进行3*3膨胀处理,再进行3*3腐蚀处理。由此能够便于后续对条栅视力图像中条栅方向进行识别。在一些示例中,可以通过对二值化图像进行2*2腐蚀处理。
69.图4是示出了本公开的示例所涉及的视网膜刺激器1的条栅视力的检测方法的应用示意图。
70.在步骤s50中,可以从二值图像选出目标像素值,根据设置于二值图像中的多条预定映射线的垂直方向上是否存在用于投影的目标像素值,获得各条预定映射线上具有目标像素值投影的对应像素点的数量。在一些示例中,可以选择二值图像中的最小灰度值作为目标像素值。由此能够从二值图像中选出目标像素值。但本公开的示例不限于此,也可以选择二值图像中的最大灰度值作为目标像素值。
71.在一些示例中,条栅视力图像的条栅方向选自水平方向、竖直方向、第一方向和第二方向中的一种,其中,第一方向和第二方向分别与水平方向之间存在一定的夹角。在一些示例中,如图4所示,第一方向与水平方向(即水平线l)之间的夹角γ可以为45
°
,第二方向与水平方向(即水平线l)之间的夹角θ可以为135
°
。在一些示例中,条栅视力图像的条栅方向可以参考图5中的条栅方向。由此能够便于后续确定条栅视力图像的条栅方向。在一些示例中,在步骤s50中,可以将二值图像作为一个坐标图,可以将二值图像中的各个像素点分别作为一个个具有具体坐标的坐标点,例如,如图4所示,点o对应的像素点的坐标为(0,0)。
72.在一些示例中,多条预定映射线的方向可以分别为水平方向、竖直方向、第一方向和第二方向,其中,第一方向和第二方向分别与水平方向之间存在一定的夹角。在一些示例
中,可以根据多条预定映射线的方向在二值图像中获得多条预定映射线。在一些示例中,各条预定映射线从二值图像的一侧到二值图像的另一侧(参见图4,例如线c从图4中的二值图像的下底侧到上侧),各条预定映射线的方向分别为水平方向、竖直方向、与水平方向之间的夹角γ为45
°
的第一方向(参见图4中的线c)和与水平方向之间的夹角θ为135
°
的第二方向(参见图4中的线d)。由此能够便于确定预定映射线。在一些示例中,可以选择各条预定映射线在二值图像中的部分线段或全部线段为有效对应部分。在一些示例中,各条预定映射线可以保留有效对应部分,也即可以统计各条预定映射线的有效对应部分上的具有目标像素值投影的对应像素点的数量,具体而言,可以统计二值图像中具有目标像素值的目标像素点投影在各条预定映射线的有效对应部分上的对应像素点的数量。在一些示例中,若目标像素向预定映射线作垂线并在该预定映射线的有效对应部分没有交点,则该目标像素点在该预定映射线上没有对应像素点。在这种情况下,能够便于后续统计各条预定映射线上具有目标像素值投影的对应像素点的数量在各条预定映射线上的对应像素点的数量。
73.在一些示例中,可以根据设置于二值图像中的多条预定映射线的垂直方向上是否存在用于投影的目标像素值(即具有目标像素值的像素点),获得各条预定映射线上具有目标像素值投影的对应像素点的数量。具体而言,可以通过判断在各条预定映射线的垂直方向上是否存在具有目标像素值的像素点,具有目标像素值的像素点投影在各条预定映射线上获得对应像素点,可以获得各条预定映射线上具有目标像素值投影的对应像素点的数量。也即,可以通过判断在各条预定映射线的垂直方向上二值图像中是否存在与该预定映射线上的像素点位于同一条直线上的具有目标像素值的目标像素点,若存在,则将该像素点作为对应像素点,对该预定映射线上的各个像素点进行确定,之后可以统计获得该预定映射线上具有的对应像素点的数量。在这种情况下,能够判断各条预定映射线上的各个像素点是否为对应像素点,并能够统计各条预定映射线上具有目标像素值投影的对应像素点的数量。
74.在一些示例中,可以通过将二值图像中具有目标像素值的目标像素点分别向各条预定映射线作垂线,并与该预定映射线的交点作为该目标像素点投影在该预定映射线的对应像素点。在一些示例中,在各条预定映射线的坐标点为一个个像素点(其对应的横坐标和纵坐标均为整数),因此各个目标像素点在各条预定映射线上的对应像素点应为一个个像素点。在一些示例中,若目标像素点向预定映射线作垂线其交点对应的横坐标或纵坐标不为整数,则可以将该交点在该预定映射线上的任一相邻像素点作为该目标像素点的对应像素点。但本公开的示例不限于此,在统计该预定映射线上对应像素点的数量时也可以认为该目标像素点在该预定映射线上没有投影,也即该目标像素点在该预定映射线上没有对应像素点。例如,如图4所示,在大小为160*120的二值图像中,目标像素点的坐标为(x
0,
,y
0,
),线a对应水平方向的预定映射线的有效映射部分,且满足:y=110,其中该目标像素点在线a的对应像素点可以满足:(x
0,
,110);线b对应竖直方向的预定映射线的有效映射部分,且满足:x=150,其中该目标像素点在线b的对应像素点可以满足:(150,y
0,
);线c对应第一方向的预定映射线的有效映射部分,且满足:y=x
‑
24,其中该目标像素点在线c的对应像素点可以满足:((x
0,
+y
0,
)/2+12,(x
0,
+y
0,
)/2
‑
12);线d对应第二方向的预定映射线的有效映射部分,且满足:y=
‑
x+144,其中该目标像素点在线d的对应像素点可以满足:(72
‑
(y0‑
,x
0,
)/2,(y0‑
,x
0,
)/2+72)。若图4中目标像素点m的坐标为(153,0),则目标像素点m在线d上没有对应
像素点,目标像素点m在线c上的对应像素点的坐标理论上应该为(177/2,129/2),但实际上线c上并未存在点(177/2,129/2),故可以将其相邻的点(88,64)或(89,65)作为目标目标像素点m在线c的对应像素点的,也可以认为该目标像素点m在线c上没有对应像素点,即不统计目标像素点m在线c上的对应像素点。
75.在一些示例中,在统计预定映射线上对应像素点的数量时,多个目标像素点在该预定映射线上的相同的对应像素点可以仅统计一次。
76.如上所述,在步骤s50中,可以获得二值图像中具有目标像素值的目标像素点投影在各条预定映射线上对应像素点的数量,也即可以获得各条预定映射线上的目标像素值投影的对应像素点的数量。
77.在步骤s60中,根据各条预定映射线上的目标像素值投影的对应像素点的数量和第二类预定阈值确定目标预定映射线,从而确定二值图像上的条栅方向,其中,二值图像上的条栅方向垂直于目标预定映射线的方向。
78.在一些示例中,可以根据步骤s50中获得的各条预定映射线上具有目标像素值的目标像素点投影的对应像素点的数量和第二类预定阈值进行比较来判断各条预定映射线上的对应像素点是否连续,可以从多条预定映射线中确定目标预定映射线。由此能够确定目标预定映射线。
79.在一些示例中,条栅方向可以为水平方向、竖直方向、与水平方向之间的夹角γ为45
°
的方向(或第一方向)和与水平方向之间的夹角θ为135
°
的方向(或第二方向)中的一种。多条预定映射线可以为水平方向、竖直方向、与水平方向之间的夹角为45
°
的方向和与水平方向之间的夹角135
°
的方向。在一些示例中,多个目标像素点可以在与二值图像的条栅方向垂直的预定映射线上的对应像素点是不连续的,该预定映射线可以为目标预定映射线。例如,如图4所示,条栅方向为与水平方向之间的夹角为135
°
的方向,则多个目标像素点可以在线c上的对应像素点是不连续的,在这种情况下,线c对应的预定映射线为目标预定映射线。
80.在一些示例中,各条预定映射线的有效对应部分上对应的像素点是有限个,因此可以通过判断多个目标像素点在各条预定映射线的有效对应部分上的对应像素点的数量来判断多个目标像素点在该预定映射线的对应像素点是否为连续的,由此能够确定目标预定映射线,从而可以确定出条栅方向。在一些示例中,可以将多个目标像素点在各条预定映射线上的对应像素点的数量与第二类预定阈值进行比较来判断多个目标像素点在该预定映射线的对应像素点是否为连续的。
81.在一些示例中,第二类预定阈值可以在其他设备中获得,在步骤s60中可以将步骤s50中获得的二值图像中多个目标像素点在各条预定映射线上的数量与预先设定好的第二类预定阈值进行比较。
82.在一些示例中,第二类预定阈值可以基于图像数据库来获得。在一些示例中,通过图像数据库中的多张不同条栅宽度和条栅方向的条栅视力图像进行仿真实验,例如,可以分别选用最小分辨视角的对数为1.5~2.9,并且对应的条栅方向可以依次为水平方向、竖直方向、与水平方向之间的夹角γ为45
°
的方向(或第一方向)和与水平方向之间的夹角θ为135
°
的方向(或第二方向)的条栅视力图像。将多张不同情况下(即条栅宽度和/或条栅方向不同)的条栅视力图像经过和上述二值图像相同的处理,例如可以将多张条栅视力图像经
过上述步骤s40和步骤s50的处理,然后分别统计在不同情况下(即条栅宽度和/或条栅方向不同)的条栅视力图像中具有目标像素值的目标像素点在各条预定映射线上的对应像素点的数量,然后通过分析统计获得第二类预定阈值。在一些示例中,第二类预定阈值包括条栅方向分别为水平方向、竖直方向、与水平方向之间的夹角γ为45
°
的方向(或第一方向)和与水平方向之间的夹角θ为135
°
的方向(或第二方向)时,多个目标像素点在各条预定映射线上的对应像素点的数量的阈值范围。在这种情况下,可以将步骤s50中获得的二值图像中多个目标像素点在各条预定映射线上的数量和第二类预定阈值进行比较,可以确定目标预定映射线(即多个目标像素点在该预定映射线上的对应像素点不连续的预定映射线),从而确定二值图像中的条栅方向,目标预定映射线可以和二值图像中的条栅方向垂直。
83.在一些示例,经过上述步骤,初始图像被转变为二值图像,但并未改变初始图像中的条栅方向,即初始图像中的条栅方向和二值图像中条栅方向相同,因此可以确定初始方向中的条栅方向。
84.图5是示出了本公开的示例所涉及的方向模板示意图。图6是示出了本公开的示例所涉及的刺激电极阵列11的配置位置示意图。
85.在一些示例中,图像处理装置30可以预先设定好对应条栅方向的多个方向模板,例如,如图5所示,多个方向模板包括与水平方向对应的水平模板(参见图5(a)),与竖直方向对应的竖直模板(参见图5(b)),与第一方向对应的第一方向模板(参见图5(c)),与第二方向对应的第二方向模板(参见图5(d))。在一些示例中,图像处理装置30可以基于确定的条栅方向从预先设定好的方向模板中选出与条栅方向对应的方向模板,例如,与图4中的条栅方向对应的第二方向模板(参见图5(d))。
86.在一些示例中,图像处理装置30中配置的多个方向模板可以和刺激电极阵列11的配置位置相匹配,例如,如图5和图6所示,刺激电极阵列11为水平放置,则图像处理装置30预先设定好的多个方向模板可以参考图5。
87.在一些示例中,图像处理装置30可以根据选出的方向模板(例如第二方向模板)通过发射天线向植入装置10发射视觉信号,植入装置10可以将视觉信号转为电刺激信号,通过刺激电极阵列11刺激视网膜的神经节细胞或双极细胞,由此能够使患者识别出初始图像的条栅方向。例如,如图4~图6所示,刺激电极阵列11为水平放置,图像处理装置30根据图4的条栅方向选出的第二方向模板(参见图5(d))向植入装置10发射视觉信号,植入装置10可以将视觉信号转为电刺激信号,可以使图6中黑色的电极(例如刺激电极101和刺激电极103等)工作对视网膜的神经节细胞或双极细胞进行刺激,由此能够使患者识别出条栅方向。
88.虽然以上结合附图和实施例对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1