石墨舟全舟图像翘片检测的图像处理方法与流程
1.本发明涉及图像处理技术领域,特别是涉及一种线阵相机拍摄图像的处理方法。
背景技术:
2.石墨舟自动上下片机作为光伏制造业自动化设备的典型代表,用于太阳能电池片生产过程中的pecvd工艺前后,将硅片自动装载到石墨舟中或将石墨舟中的硅片自动装载到片篮中,其具有自动化及生产效率高、减少人工与硅片的接触污染、大幅度增加取放片的稳定性等特点,被业界公认为光伏制造行业的重点设备。上下料机器人将硅片插入到石墨舟中的每个舟页,机器人通过紧贴放置的方式将硅片放置于竖直的舟槽上的卡点上,一个舟槽内的硅片必须是相互平行放置的,但是由于舟槽上的卡点出现磨损或者运行过程中震动,会导致平行的硅片出现人字形的情况,也就搭片;如果出现搭片不及时处理,进入pecvd后,出现搭片情况的硅片反应后就会成为废品,浪费了能源,同时增加了硅片不良率。同时,pecvd工艺后,石墨舟出舟,在传输至上下片机过程中,由于空气的热胀冷缩或者是pecvd内部机械手搬运过程,都有可能造成硅片翘片、搭片及掉片情况,且传输的过程中也会有石墨舟内硅片出现翘片、搭片及掉片的情况,异常的硅片若不处理,上下片机台的机械手进入舟槽取片时,异常的硅片都会被机械手碰碎掉,对生产太阳能硅片公司造成了大量的经济损失。而目前太阳能电池片生产商大多采用人工检测的方法,对石墨舟中紧密安插在各舟页中的硅片进行逐一检查,来排除硅片翘起、掉下及搭片的情况,人工检测时石墨舟温度还没有全部降下来,检测环境温度相对较高,通常无法连续、稳定地完成这些带有高度重复性的工作,这种传统的检测方法对于石墨舟进舟和出舟过程中硅片的检测精度不高,尤其是出舟过程无法准确无误的检测出硅片的翘片、搭片及掉片情况。
技术实现要素:
3.为了实现快速性、可重复性、智能化的机器视觉检测,本发明提供一种线阵相机阵列拍摄全舟图像的石墨舟全舟图像翘片检测的图像处理方法,以实现计算机检测翘片状态,代替人工肉眼检测,起到减员增效的结果,本发明的技术方案为:包括石墨舟连接杆定位方法、出入炉检测方法、图像运动校正方法、翘片检测方法;
4.石墨舟连接杆定位方法的步骤为:
5.步骤s101,根据命令消息,在硬盘上读取一幅全舟图像,作为原始数据存储在内存中;
6.步骤s102,按照每行图像的像素值进行累加,获得数值a,数值a为一维数组,大小为图像的高度;
7.步骤s103,对数组a进行均值滤波,获得同等大小的数组b;
8.步骤s104,扫描数组b,获得局部峰值数据,形成数组c,数值c为一维数组,大小为石墨舟连接柱的数目加1。
9.出入炉检测方法的步骤为:
10.步骤s201,读取石墨舟连接柱定位方法的结果数组c;
11.步骤s202,求数组c的差分,获得位移数组d;
12.步骤s203,对位移数组d的前三项进行累加得到数据e,通过doorinout门限值判断是否为出入炉状态,大于doorinout值的为入炉状态,其它的为出炉状态,门限doorinout值是设置参数。
13.图像运动校正方法的步骤为:
14.步骤s301,读取内存的原始图像image0;
15.步骤s302,对原始图像image0进行高斯滤波,获得image1;
16.步骤s303,对图像image1进行sobel滤波,获得image2;
17.步骤s304,用阈值door2进行二值化处理,获得bw0图像;
18.步骤s305,按照行扫描bw0图像,获得第一个白点的数值,形成数组d;
19.步骤s306,求数组d的差分,获得差分数组c;
20.步骤307,根据数组c和d,移动每行图像,形成图像bw1。
21.翘片检测方法的步骤为:
22.步骤s401,读取运动校正处理后的二值图像bw1,作为判断翘片的基础图像;
23.步骤s402,根据数组c和配置参数,获取各检查区域的子图像坐标rect,子图像坐标rect是一个区域数组,包含在图像中的坐标和长宽;配置参数是系统安装好相机定标获得的参数,受各组相机的相对位置以及相机和石墨舟的相对位置变化而变化;
24.步骤s403,根据检查区域子图像坐标rect和校正图像bw1,获得检测子图像bw2;
25.步骤s404,针对子图像bw2进行连通域处理,并加以开闭运算,获得连通域面积数组,用阈值门限door3进行判决,大于门限则为有翘片,否则无翘片;
26.步骤s405,循环步骤s403和步骤s404,完成判断石墨舟所有槽位的翘片状态,并输出结果。
27.本发明的有益效果是:采用上述检测方法,可以替代人工目视检测,实现自动化检测,整个检测运行时间小于一秒,同时也提高了检测准确率,极大的提高了整体生产效率。
附图说明
28.图1为本发明所涉及的石墨舟的结构示意图;
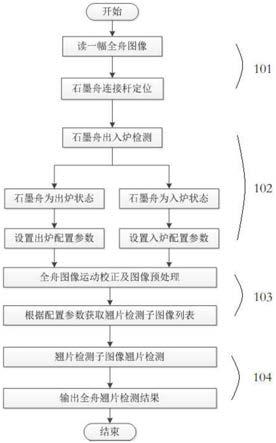
29.图2为本发明的整体图像处理流程图;
30.图3为本发明实施例的石墨舟连接柱定位方法流程图;
31.图4a、b为本发明实施例的石墨舟全舟图像,图4a为出炉图像,图4b为入炉图像;
32.图4c为本发明实施例的石墨舟出入炉状态检测方法流程图;
33.图5为本发明实施例的图像运动校正方法流程图;
34.图6为本发明实施例的翘片检测方法流程图。
具体实施方式
35.为了使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术作进一步地详细描述,所描述的实施例不应视为对本技术的限制,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
36.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述本技术实施例的目的,不是旨在限制本技术。
37.参见图1,石墨舟由石墨舟片1和陶瓷双头螺杆2来接组装而成,形成多槽多列的形状,从而形成若干单元的槽位3用以放置硅片。全舟图像是由多路线阵相机阵列通过内触发采集的拼接图像,是对石墨舟全舟进行高分辨率的成像,其图像大小为8192*9800,图像的x、y坐标轴方向如图1标示。
38.图像的y轴分辨率在运动方向随石墨舟运动速度变化而变化,产生图像y轴方向的变形;线阵相机在x轴方向的图像分辨率是不变的,但会随石墨舟在轨道运动时的抖动、偏移产生图像扭曲。
39.本发明提供的图像处理方法,包括石墨舟连接杆定位方法101、出入炉检测方法102、图像运动校正方法103、翘片检测方法104,详细的图像处理流程图见图2。
40.具体的,石墨舟连接杆定位方法通过x方向的图像积分获取一维数组,经过峰值判断获取石墨舟连接柱的y轴方向的位置,从而获取的石墨舟连接柱位置,其处理流程图见图3,包含:
41.步骤s101,根据命令消息,在硬盘上读取一幅全舟图像,文件格式为jpg压缩图像,解压缩后形成w*h(w为宽度,h为长度)的原始图像数据,并存储在内存中;
42.步骤s102,按照每行图像的像素值进行累加,获得数值a,数值a为一维数组,大小为图像的高度,具体公式如下:
[0043][0044]
…
[0045][0046]
步骤s103,对数组a进行均值滤波,获得同等大小的数组b,具体公式如下:
[0047][0048]
…
[0049][0050]
步骤s104,扫描数组b,获得局部峰值数据,形成数组c,数值c为一维数组,大小为石墨舟连接柱的数目加1。
[0051]
具体的,出入炉检测方法根据石墨舟连接柱位置数组c,判读石墨舟出炉、入炉状态,石墨舟出入炉图像区别见图4a、4b所示,详细的处理流程图见图4c,包含:
[0052]
步骤s201,读取石墨舟连接柱定位方法的结果数组c;
[0053]
步骤s202,求数组c的差分,获得位移数组d,具体公式如下:
[0054]
d
i
=c
i+1
‑
c
i
[0055]
步骤s203,对位移数组d的前三项进行累加得到数据e,通过doorinout门限值判断是否为出入炉状态,大于doorinout值的为入炉状态,其它的为出炉状态,门限doorinout值是设置参数。
[0056]
e=c1+c2+c3[0057]
e≥doorinout入炉状态
[0058]
e<doorinout出炉状态
[0059]
具体的,图像运动校正方法在原始图像上提取石墨舟边缘,获得分段图像扭曲校正参数;并将该参数运用到sobel及阈值法获得的二值图像中去,获得校正的二值图像,详细流程图见图5,包含:
[0060]
步骤s301,读取内存的原始图像image0;
[0061]
步骤s302,对原始图像image0进行高斯滤波,获得image1,高斯滤波是图像通用处理方法,主要为了去除噪声。
[0062]
步骤s303,对图像image1进行sobel滤波,获得image2,sobel滤波是图像通用处理方法,为了获得物体边缘。
[0063]
步骤s304,用阈值door2进行二值化处理,获得bw0图像,二值化是图像通用处理方法,为了获得物体有无。
[0064]
步骤s305,按照行扫描bw0图像,获得第一个白点的数值,形成数组d;
[0065]
步骤s306,求数组d的差分,获得差分数组c,差分公式如下:
[0066]
d
i
=c
i+1
‑
c
i
[0067]
步骤307,根据数组c和d,移动每行图像,形成图像bw1。
[0068]
具体的,翘片检测方法在运动校正二值图像bw1上获取翘片检测区域,通过连通域面积大小的方法进行判断,详细流程图见图6,包含:
[0069]
步骤s401,读取运动校正处理后的二值图像bw1,作为判断翘片的基础图像;
[0070]
步骤s402,根据数组c和配置参数,获取各检查区域的子图像坐标rect,子图像坐标rect是一个区域数组,包含在图像中的坐标和长宽;配置参数是系统安装好相机定标获得的参数,受各组相机的相对位置以及相机和石墨舟的相对位置变化而变化;
[0071]
步骤s403,根据检查区域子图像坐标rect和校正图像bw1,获得检测子图像bw2;bw2是一个小幅图像组,具体数量大于等于石墨舟槽数*列数,本质上是包含每一个硅片边缘区域的子图像。
[0072]
步骤s404,针对子图像bw2进行连通域处理,连通域处理也是图像处理的通用算法,为了获取物体的形状区域。并加以开闭运算,获得连通域面积数组s,选取数组s中最大值s
max
,用阈值门限door3进行判决,大于门限则为有翘片,否则无翘片;
[0073]
s
max
≥door3有翘片
[0074]
s
max
<door3无翘片
[0075]
步骤s405,循环步骤s403和步骤s404,完成判断石墨舟所有槽位的翘片状态,并输出结果。
[0076]
上述的具体实施方式只是示例性的,是为了更好的使本领域技术人员能够理解本专利,不能理解为是对本专利包括范围的限制;只要是根据本专利公开的技术方案所做出的技术内容实质相同或等同的任何的变更或修饰,均落入本专利包括的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1