一种可见光遥感图像船舶目标识别方法及系统与流程
一种可见光遥感图像船舶目标识别方法及系统
1.技术领域
2.本发明涉及一种可见光遥感图像船舶目标识别方法及系统,属于遥感图像处理、目标检测及目标识别技术领域。
背景技术:
3.随着遥感技术的不断进步,光学遥感图像的质量也在不断提高,对遥感图像进行合理而充分地利用,既对土地资源管理、城市建设规划和生态环境保护等民用方面有所贡献,也对军事方面有所帮助。遥感图像具有丰富的地物纹理信息,因此,对遥感图像进行目标识别是航空和卫星图像分析领域中的重要问题。船舶目标识别技术由于海洋表面的大气、光照、云层、岛屿等不确定性条件,传统的船舶识别方法识别精度低、稳定性差,而目前流行的基于深度学习的船舶识别方法在识别精度上表现不错,但网络结构复杂,整体识别速度较慢。因此,研究一种精度高、稳定性好,且速度块的船舶识别技术具有十分重要的价值。
4.现有的可见光遥感图像船舶目标识别技术,特别是基于深度学习来开展的研究工作,采用的方法多为:对输入的可见光遥感图像,直接利用卷积神经网络,提取图像的深度特征,构建分类器,利用特征进行分类和回归,得到船舶目标所在区域的外接矩形坐标和船舶目标的类别。
技术实现要素:
5.现有技术问题的缺点在于:现有的可见光遥感图像船舶目标识别方法,大多采用卷积神经网络对船舶目标进行识别,首先,经过多层卷积后,可提取可见光遥感图像的深度特征图,然后,特征图经过区域推荐网络得到推荐区域,即可能的目标区域,然后对推荐区域进行进一步回归,得到精细化的船舶目标区域,再利用分类网络对船舶目标区域进行分类识别,这些方法所采用的网络较复杂,模型参数量大,虽然识别精度高,但识别的速度较慢。
6.本发明的目的在于,克服现有技术存在的技术缺陷,解决上述技术问题,提出一种可见光遥感图像船舶目标识别方法及系统,该方法及系统将传统的船舶识别方法和基于深度学习的船舶识别方法进行结合,取长补短,首先采用传统的图像处理思路完成船舶目标检测,然后对检测得到的可能的船舶目标区域再利用一个小型的卷积神经网络完成船舶目标识别。该方法具有识别精度高,参数量小,识别速度快等优势。
7.本发明具体采用如下技术方案:一种可见光遥感图像船舶目标识别方法,包括如下步骤:水陆分割步骤,具体执行:输入原始的rgb可见光遥感图像,输出水陆分割后的二值图像;
roi提取步骤,具体执行:输入原始的rgb可见光遥感图像和所述水陆分割步骤输出的水陆分割后的二值图像,输出只包含roi的rgb可见光遥感图像;船舶目标检测步骤,具体执行:输入所述roi提取步骤输出的只包含roi的rgb可见光遥感图像,输出所有可能的船舶目标候选区域rgb切片图像;船舶目标识别步骤,具体执行:输入所述船舶目标检测步骤输出的所有可能的船舶目标区域rgb切片图像,输出经过识别后的所有船舶目标区域图像。
8.作为一种较佳的实施例,所述水陆分割步骤包括:利用图像处理技术完成对输入的rgb遥感图像分割为水面区域和陆地区域,具体包括:首先,对输入的rgb遥感图像进行灰度化,得到灰度图像;然后,利用sobel算子对所述灰度图像计算梯度,得到梯度图像,由于水面区域相对陆地区域的灰度变化较为均匀,其梯度值和陆地部分具有明显差别;其次,基于梯度图像水陆部分差别明显的特点,采用自适应阈值分割算法对梯度图像进行阈值分割,最终得到一个分割后的二值图像,实现把输入的rgb遥感图像分割为水面区域和陆地区域。
9.作为一种较佳的实施例,所述roi提取步骤具体包括:基于水陆分割的结果进一步提取水陆交界部分的靠岸区域,同水面区域进行合并,作为船舶可能出现区域,定义其为感兴趣区域roi;首先,对水陆分割步骤输出的二值图像进行面积滤波,去除一些分割中产生的噪声和本身面积较小的水面等干扰,得到去除干扰后的二值图像;然后,对所述去除干扰后的二值图像进行形态学处理,使之水陆边界部分得到一定的膨胀,从而去除边界区域的噪声,便于后续的边界提取;其次,采用边缘提取算法对边界膨胀后的二值图像提取边界,得到水陆二值边界,对提取的水陆二值边界求取最小外接多边形,得到水陆交界部分的靠岸区域,并将该区域与膨胀后的水面区域求并集,最终得到roi二值掩膜;最后,利用所述roi二值掩膜映射到原始rgb遥感图像,获得只包含roi的rgb遥感图像。
10.作为一种较佳的实施例,所述船舶目标检测步骤具体包括:对所述roi提取步骤输出的只包含roi的rgb遥感图像进行船舶目标检测,首先,对只包含roi的rgb遥感图像进行灰度化,得到灰度图像;然后,采用自适应阈值分割算法对所述灰度图像进行分割,得到一个二值图像;其次,对所述二值图像进行膨胀和面积滤波处理,过滤掉分割中产生的一些噪声,得到许多连通域;最后,对所述连通域提取最小外接矩形,所述最小外接矩形包围的区域均作为船舶目标的候选区域,并对所述候选区域映射到原始rgb遥感图像上进行切片,输出候选船舶目标rgb切片图像。
11.作为一种较佳的实施例,所述船舶目标识别步骤包括:基于一个小型的卷积神经网络对船舶检测步骤输出的候选船舶目标区域切片图像进行目标分类识别,具体包括:首先,将候选船舶目标rgb切片图像送入一个特征提取网络中提取深度特征,所述特征提取网络采用18层的小型残差网络;然后对提取的深度特征图展平后送入分类网络中进行分类,所述分类网络为一个全连接网络,采用softmax函数完成分类;最终,所述船舶目标识别步骤对每个区域切片图像完成船舶目标的型号分类识别和虚警过滤,输出识别结果。
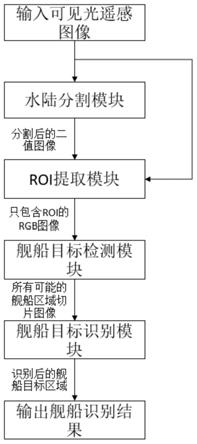
12.本发明还提出一种可见光遥感图像船舶目标识别系统,包括:水陆分割模块,具体执行:输入原始的rgb可见光遥感图像,输出水陆分割后的二值图像;roi提取模块,具体执行:输入原始的rgb可见光遥感图像和所述水陆分割模块输出的水陆分割后的二值图像,输出只包含roi的rgb可见光遥感图像;船舶目标检测模块,具体执行:输入所述roi提取模块输出的只包含roi的rgb可见光遥感图像,输出所有可能的船舶目标候选区域rgb切片图像;船舶目标识别模块,具体执行:输入所述船舶目标检测模块输出的所有可能的船舶目标区域rgb切片图像,输出经过识别后的所有船舶目标区域图像。
13.作为一种较佳的实施例,所述水陆分割模块具体执行:利用图像处理技术完成对输入的rgb遥感图像分割为水面区域和陆地区域,具体包括:首先,对输入的rgb遥感图像进行灰度化,得到灰度图像;然后,利用sobel算子对所述灰度图像计算梯度,得到梯度图像,由于水面区域相对陆地区域的灰度变化较为均匀,其梯度值和陆地部分具有明显差别;其次,基于梯度图像水陆部分差别明显的特点,采用自适应阈值分割算法对梯度图像进行阈值分割,最终得到一个分割后的二值图像,实现把输入的rgb遥感图像分割为水面区域和陆地区域。
14.作为一种较佳的实施例,所述roi提取模块具体执行:基于水陆分割的结果进一步提取水陆交界部分的靠岸区域,同水面区域进行合并,作为船舶可能出现区域,定义其为感兴趣区域roi;首先,对水陆分割模块输出的二值图像进行面积滤波,去除一些分割中产生的噪声和本身面积较小的水面等干扰,得到去除干扰后的二值图像;然后,对所述去除干扰后的二值图像进行形态学处理,使之水陆边界部分得到一定的膨胀,从而去除边界区域的噪声,便于后续的边界提取;其次,采用边缘提取算法对边界膨胀后的二值图像提取边界,得到水陆二值边界,对提取的水陆二值边界求取最小外接多边形,得到水陆交界部分的靠岸区域,并将该区域与膨胀后的水面区域求并集,最终得到roi二值掩膜;最后,利用所述roi二值掩膜映射到原始rgb遥感图像,获得只包含roi的rgb遥感图像。
15.作为一种较佳的实施例,所述船舶目标检测模块具体执行:对所述roi提取模块输出的只包含roi的rgb遥感图像进行船舶目标检测,首先,对只包含roi的rgb遥感图像进行灰度化,得到灰度图像;然后,采用自适应阈值分割算法对所述灰度图像进行分割,得到一个二值图像;其次,对所述二值图像进行膨胀和面积滤波处理,过滤掉分割中产生的一些噪声,得到许多连通域;最后,对所述连通域提取最小外接矩形,所述最小外接矩形包围的区域均作为船舶目标的候选区域,并对所述候选区域映射到原始rgb遥感图像上进行切片,输出候选船舶目标rgb切片图像。
16.作为一种较佳的实施例,所述船舶目标识别模块具体执行:基于一个小型的卷积神经网络对船舶检测模块输出的候选船舶目标区域切片图像进行目标分类识别,具体包括:首先,将候选船舶目标rgb切片图像送入一个特征提取网络中提取深度特征,所述特征
提取网络采用18层的小型残差网络;然后对提取的深度特征图展平后送入分类网络中进行分类,所述分类网络为一个全连接网络,采用softmax函数完成分类;最终,所述船舶目标识别模块对每个区域切片图像完成船舶目标的型号分类识别和虚警过滤,输出识别结果。
17.本发明所达到的有益效果:1、本发明的方法及系统结合了传统方法和深度学习方法的优点,采用传统方法完成水陆分割、roi提取和船舶目标检测,采用深度学习方法完成船舶分类识别,即保证了算法的识别精度又提升了整体速度。2、本发明采用先提取roi,然后在roi中检测船舶目标,最后再对目标进行精细化判别的技术路线,在确保高召回率的同时提升了识别的准确率。3、本发明技术的适用范围广,既可适用于海上船舶目标检测也可用于近岸船舶目标检测。4、本发明无需进行反复的大规模训练,仅需要训练一个小型的分类网络,训练速度快,占用资源少,相比于端到端的船舶检测网络,可移植性更好。
附图说明
18.图1是本发明的一种可见光遥感图像船舶目标识别系统的拓扑原理示意图;图2是本发明的水陆分割模块的拓扑原理示意图;图3是本发明的roi提取模块的拓扑原理示意图;图4是本发明的船舶目标检测模块的拓扑原理示意图;图5是本发明的船舶目标识别模块的拓扑原理示意图。
具体实施方式
19.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
20.实施例1:本发明提出一种可见光遥感图像船舶目标识别方法,包括如下步骤:水陆分割步骤,具体执行:输入原始的rgb可见光遥感图像,输出水陆分割后的二值图像;roi提取步骤,具体执行:输入原始的rgb可见光遥感图像和所述水陆分割步骤输出的水陆分割后的二值图像,输出只包含roi的rgb可见光遥感图像;船舶目标检测步骤,具体执行:输入所述roi提取步骤输出的只包含roi的rgb可见光遥感图像,输出所有可能的船舶目标候选区域rgb切片图像;船舶目标识别步骤,具体执行:输入所述船舶目标检测步骤输出的所有可能的船舶目标区域rgb切片图像,输出经过识别后的所有船舶目标区域图像。
21.作为一种较佳的实施例,所述水陆分割步骤包括:利用图像处理技术完成对输入的rgb遥感图像分割为水面区域和陆地区域,具体包括:首先,对输入的rgb遥感图像进行灰度化,得到灰度图像;然后,利用sobel算子对所述灰度图像计算梯度,得到梯度图像,由于水面区域相对陆地区域的灰度变化较为均匀,其梯度值和陆地部分具有明显差别;其次,基于梯度图像水陆部分差别明显的特点,采用自适应阈值分割算法对梯度图像进行阈值分割,最终得到一个分割后的二值图像,实现把输入的rgb遥感图像分割为水面区域和陆地区域。
22.作为一种较佳的实施例,所述roi提取步骤具体包括:基于水陆分割的结果进一步
提取水陆交界部分的靠岸区域,同水面区域进行合并,作为船舶可能出现区域,定义其为感兴趣区域roi;首先,对水陆分割步骤输出的二值图像进行面积滤波,去除一些分割中产生的噪声和本身面积较小的水面等干扰,得到去除干扰后的二值图像;然后,对所述去除干扰后的二值图像进行形态学处理,使之水陆边界部分得到一定的膨胀,从而去除边界区域的噪声,便于后续的边界提取;其次,采用边缘提取算法对边界膨胀后的二值图像提取边界,得到水陆二值边界,对提取的水陆二值边界求取最小外接多边形,得到水陆交界部分的靠岸区域,并将该区域与膨胀后的水面区域求并集,最终得到roi二值掩膜;最后,利用所述roi二值掩膜映射到原始rgb遥感图像,获得只包含roi的rgb遥感图像。
23.作为一种较佳的实施例,所述船舶目标检测步骤具体包括:对所述roi提取步骤输出的只包含roi的rgb遥感图像进行船舶目标检测,首先,对只包含roi的rgb遥感图像进行灰度化,得到灰度图像;然后,采用自适应阈值分割算法对所述灰度图像进行分割,得到一个二值图像;其次,对所述二值图像进行膨胀和面积滤波处理,过滤掉分割中产生的一些噪声,得到许多连通域;最后,对所述连通域提取最小外接矩形,所述最小外接矩形包围的区域均作为船舶目标的候选区域,并对所述候选区域映射到原始rgb遥感图像上进行切片,输出候选船舶目标rgb切片图像。
24.作为一种较佳的实施例,所述船舶目标识别步骤包括:基于一个小型的卷积神经网络对船舶检测步骤输出的候选船舶目标区域切片图像进行目标分类识别,具体包括:首先,将候选船舶目标rgb切片图像送入一个特征提取网络中提取深度特征,所述特征提取网络采用18层的小型残差网络;然后对提取的深度特征图展平后送入分类网络中进行分类,所述分类网络为一个全连接网络,采用softmax函数完成分类;最终,所述船舶目标识别步骤对每个区域切片图像完成船舶目标的型号分类识别和虚警过滤,输出识别结果。
25.实施例2:如图1所示,本发明还提出一种可见光遥感图像船舶目标识别系统,包括:水陆分割模块,具体执行:输入原始的rgb可见光遥感图像,输出水陆分割后的二值图像;roi提取模块,具体执行:输入原始的rgb可见光遥感图像和所述水陆分割模块输出的水陆分割后的二值图像,输出只包含roi的rgb可见光遥感图像;船舶目标检测模块,具体执行:输入所述roi提取模块输出的只包含roi的rgb可见光遥感图像,输出所有可能的船舶目标候选区域rgb切片图像;船舶目标识别模块,具体执行:输入所述船舶目标检测模块输出的所有可能的船舶目标区域rgb切片图像,输出经过识别后的所有船舶目标区域图像。
26.可选的,如图2所示,所述水陆分割模块具体执行:利用图像处理技术完成对输入的rgb遥感图像分割为水面区域和陆地区域,具体包括:首先,对输入的rgb遥感图像进行灰度化,得到灰度图像;然后,利用sobel算子对所述灰度图像计算梯度,得到梯度图像,由于水面区域相对陆地区域的灰度变化较为均匀,其梯度值和陆地部分具有明显差别;
其次,基于梯度图像水陆部分差别明显的特点,采用自适应阈值分割算法对梯度图像进行阈值分割,最终得到一个分割后的二值图像,实现把输入的rgb遥感图像分割为水面区域和陆地区域。
27.可选的,如图3所示,所述roi提取模块具体执行:基于水陆分割的结果进一步提取水陆交界部分的靠岸区域,同水面区域进行合并,作为船舶可能出现区域,定义其为感兴趣区域roi;首先,对水陆分割模块输出的二值图像进行面积滤波,去除一些分割中产生的噪声和本身面积较小的水面等干扰,得到去除干扰后的二值图像;然后,对所述去除干扰后的二值图像进行形态学处理,使之水陆边界部分得到一定的膨胀,从而去除边界区域的噪声,便于后续的边界提取;其次,采用边缘提取算法对边界膨胀后的二值图像提取边界,得到水陆二值边界,对提取的水陆二值边界求取最小外接多边形,得到水陆交界部分的靠岸区域,并将该区域与膨胀后的水面区域求并集,最终得到roi二值掩膜;最后,利用所述roi二值掩膜映射到原始rgb遥感图像,获得只包含roi的rgb遥感图像。
28.可选的,如图4所示,所述船舶目标检测模块具体执行:对所述roi提取模块输出的只包含roi的rgb遥感图像进行船舶目标检测,由于前面的模块已完全抑制了陆地区域的干扰,roi区域中仅包含水面部分和少量靠岸陆地部分,采用简单的分割即可完成船舶目标检测,首先,对只包含roi的rgb遥感图像进行灰度化,得到灰度图像;然后,采用自适应阈值分割算法对所述灰度图像进行分割,得到一个二值图像;其次,对所述二值图像进行膨胀和面积滤波处理,过滤掉分割中产生的一些噪声,得到许多连通域;最后,对所述连通域提取最小外接矩形,所述最小外接矩形包围的区域均作为船舶目标的候选区域,并对所述候选区域映射到原始rgb遥感图像上进行切片,输出候选船舶目标rgb切片图像。
29.可选的,如图5所示,所述船舶目标识别模块具体执行:基于一个小型的卷积神经网络对船舶检测模块输出的候选船舶目标区域切片图像进行目标分类识别,具体包括:首先,将候选船舶目标rgb切片图像送入一个特征提取网络中提取深度特征,所述特征提取网络采用18层的小型残差网络;然后对提取的深度特征图展平后送入分类网络中进行分类,所述分类网络为一个全连接网络,采用softmax函数完成分类;最终,所述船舶目标识别模块对每个区域切片图像完成船舶目标的型号分类识别和虚警过滤,输出识别结果。
30.本发明的优点在于:1、本发明的整个系统由多个模块所构成,水陆分割模块对可见光遥感图像进行水面和陆地区域分割,分割后的二值图像由roi提取模块提取roi区域,roi区域由船舶检测模块进行船舶目标检测,最终由船舶识别模块完成识别。2、采用先水陆分割得到水体和陆地区域,然后对水陆边界做进一步处理从而提取靠岸区域,最终合并靠岸区域和水体区域后得到船舶目标分布的roi区域。3、船舶的检测和识别先采用传统图像处理方法对roi区域进行初步检测,获得所有可能的船舶目标后进行切片,再利用卷积神经网络进行船舶型号的分类识别和虚警过滤。
31.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1