一种基于HOG特征及DMD的图像分类方法
一种基于hog特征及dmd的图像分类方法
技术领域
1.本发明涉及一种基于hog特征及dmd的图像分类方法,属于图像分类技术领域。
背景技术:
2.方向梯度直方图(histogram of oriented gradient,hog)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来构成特征。相比于其他特征提取方式,hog特征具有良好的几何不变性和光学不变性而被广泛应用于图像识别领域。
3.动态模式分解(dynamic mode decomposition,dmd)是一种由数据驱动的方法,其不需要将高度复杂的系统准确分解成各自相干的时空结构方程,而是使用随时间增长、衰减和振荡的相干结构来求解或近似系统。其中的相干结构也被称为dmd模态。dmd将系统转换成各个模态的叠加,每个模态的强度都由与之对应的特征值来表示。dmd的优势在于尽管dmd模态和特征值的数学过程是线性的,但其通过叠加表示或者近似表示的系统确可以是非线性的,因此大大降低了运算成本。
4.dmd最初由schmid在2010发表的文章《dynamic mode decomposition of numerical and experimental data》中提出,并被广泛应用于分析非线性系统动力学中。dmd还被用来预测系统未来状态、自然语言处理、显著区域检测等领域。dmd受到了koopman
‑
operator分析的启发,因为其能够提供流体动力学系统中的非线性的动态本质信息而在流体领域被广泛应用。
5.dmd被广泛用于处理实时的动态数据,但利用其强大的分析能力,使其处理静态图像成为可能。将静态图像灰度矩阵进行dmd,将其分解成各个模态并叠加,形成低秩矩阵和稀疏矩阵,并将稀疏矩阵进行后续的分类识别,达到图像分类的目标。其中低秩矩阵表示图像中待识别目标的干扰背景,稀疏矩阵表示待识别目标。通过dmd可以将图像中的待识别目标进行突显,并消除背景干扰。
6.支持向量机(support vector machines,svm)是一种二分类模型,包括一类支持向量机和二类支持向量机。传统svm模型为线性分类器且模型是定义在特征空间上的最大间隔线性分类器。svm的学习策略为间隔最大化,本质为一个求解凸二次规划问题,也等价于正则化合页损失函数最小化问题。
7.相较于二类支持向量机,基于dmd及随机傅里叶特征变换的图像分类方法模型类似于一类支持向量机(one
‑
class svm)模型,该模型在训练时只需一种类型的数据,且将原点看做与提供的训练集不同的另一类数据。该模型进行训练不需要同时提供带有正标签(positive label,pl)的数据和带有负标签(negative label,nl)的数据。与二类支持向量机模型相比,一类支持向量机模型更适合应用于异常检测、单训练样本识别等实际问题。
8.对于处理非线性二分类问题,svm应用核函数,通过一个非线性变换将输入空间(欧式或某离散空间)对应到一个特征空间(希尔伯特空间),从而使得输入空间中的超曲平面模型对应到特征空间中的超平面模型,这样将二分类的学习任务通过在特征空间中求取
线性svm来完成。然而,由于映射函数无法显示表示,导致特征空间的维度无法明确确定,从而使得特征空间的维度通常很高,甚至达到无穷维度。这样就大大加深了svm算法的时间复杂度,导致基于映射函数(核函数)的svm无法满足快速处理大量数据的需求。
9.针对于svm处理非线性问题时产生的高维特征空间问题,基于dmd及随机傅里叶特征变换的图像分类方法采取随机傅里叶特征变换(random fourier features transformation,rfft)替换svm中的核函数。通过找到一个新的映射函数近似映射函数,找到新的显示表达的,且维度可控的映射函数。因此在新的特征空间中训练线性学习器时,认为:控制特征空间维度,进而控制时间复杂度和计算复杂度,在大规模数据集上能有效提高计算效率。
10.在图像分类领域的分类方法主要有:最邻近算法(k
‑
nearest neighbour,knn)、支持向量机(support vector machine,svm)、bp神经网络(back propagation neural network,bpnn)以及卷积神经网络(convolutional neural network,cnn)。其中,knn算法需要存储所有训练数据在预测时进行计算,其训练时间很短,但预测时间较长。knn分类器更适合低维度数据,在图像分类中,大多数图像都属于高维度数据,包含大量像素,因此knn算法在图像分类中预测时间较长,分类准确度较低。svm分类器相比于knn分类器更适合处理高维度数据,但是由于其自身算法的局限性,导致其需要大量时间来处理大批量图像数据,且在核函数选择上也没有统一的标准,需要根据经验进行判断,从而导致了算法在准确度和时间复杂度上的不理想。bpnn算法具有较强的非线性映射能力且具有高度的自学习和自适应能力,cnn算法在处理高维数据上优势更大,二者的图像分类准确率都很高,但都存在训练时间较长,训练结果难以收敛于全局最小值而出现局部极小化问题等缺点,从而导致二者在图像分类领域的高时间复杂度和计算复杂度。
11.本发明的目的是致力于解决上述算法在时间复杂度和算法复杂度较高的技术缺陷,同时保证较高的分类准确率。在分类准确度方面,一种基于hog特征及dmd的图像分类方法与svm、bpnn、cnn的准确率相当;然而,在复杂度方面,一种基于hog特征及dmd的图像分类方法的优势凸显:该方法具有极低的运算复杂度,进而导致算法时间延迟极低,这使得该方法更适合处理海量的图像或非图像数据,适用于样本数量有限或小样本情况下的分类与识别。在处理小样本图像时,尤其针对单一样本图像,一种基于hog特征及dmd的图像分类方法在建立模型上相较于其他算法的数据量需求更低。因此,一种基于hog特征及dmd的图像分类方法在图像分类领域具有十分显著的优势。
技术实现要素:
12.本发明的目的在于常见分类算法对于小样本图像分类、单一样本图像分类准确率较低、时间复杂度较高的技术缺陷,提出了一种基于hog特征及dmd的图像分类方法。
13.为达到上述目的,采取如下技术方案:
14.所述基于hog特征及dmd的图像分类方法,包括如下步骤:
15.步骤1、对训练图像进行基于颜色的动态模式分解,得到训练图像显著矩阵;
16.步骤2、基于步骤1得到的显著色彩矩阵提取hog特征,得到提取特征后的同类图像;
17.步骤3、将同类图像特征进行训练,得到训练好的分类模型参数;
18.其中,分类模型参数包括权重向量和分离间隔;且权重向量,记为w
new
,表示特征空间分离面的单位法向量;分离距离,记为ρ,ρ为分离面和坐标原点的距离;
19.步骤3、具体为:
20.步骤3.1、对于图像的hog特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
21.其中,随机傅里叶特征变换计算公式为(1):
[0022][0023]
其中,z(x
i
)表示数据集合z中第i个数据,该数据由x
i
经公式(1)的随机傅里叶特征变换得到;x
i
为图像特征数据且其维度为1
×
d,表明每个图像特征数据包括d个种类的特征,i的变化范围为1到n且n为数据集合z中的数据个数,σ为核带宽,h
u
为随机生成的矩阵,矩阵中元素h
u
服从高斯分布,且h
u
的维度为d
×
1,下标u的取值范围为1到d
rf
/2;d
rf
为随机傅里叶特征变换的维度,t代表转置;
[0024]
步骤3.2、从数据集合z中随机选择一个数据w0作为初始权重向量并赋值给权重向量w;
[0025]
步骤3.3、基于权重向量w通过黄金分割线搜索计算分离距离ρ;
[0026]
步骤3.4、对于wz
‑
ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
[0027]
其中,平均权重向量记为w
m
;
[0028]
步骤3.5、通过随机梯度下降法选择w和w
m
间新的权重向量w
new
,并将w
new
赋值给w;
[0029]
步骤3.6、重复步骤3.3至步骤3.5,直至s次迭代后,得到趋于稳定的wnew,将此wnew记为最优权重向量w
*
;
[0030]
其中,s的取值范围为大于15且小于30;
[0031]
步骤3.7、根据黄金分割线搜索计算出最优权重向量w
*
对应的最优分离间隔ρ
*
;
[0032]
其中,最优权重向量w*以及最优分离间隔ρ
*
为训练好的分类模型参数;
[0033]
其中,s的取值范围为大于15且小于50,基本趋于稳定的条件为w的模差值小于k;
[0034]
其中,k的取值范围为小于等于0.01;
[0035]
步骤4、对于待分类图像进行分类,具体包括如下子步骤:
[0036]
步骤4.1、对待分类图像进行预处理,得到预处理后的待分类图像;
[0037]
步骤4.2、对预处理后的待分类图像进行特征提取,得到待分类图像的特征;
[0038]
步骤4.3、基于待分类图像的特征进行随机傅里叶特征变换,得到特征测试集z;
[0039]
步骤4.4、根据步骤3得到的w
new
、ρ和步骤4.3得到的随机傅里叶特征测试集z计算w
new z
‑
ρ的值,记为p;
[0040]
其中,p的维数为1
×
n
t
;n
t
为特征测试集z中元素对应的待分类图像的数量;
[0041]
步骤4.5、根据步骤4.4得到的p值进行判断;
[0042]
其中,p值>0,待分类图像与训练图像是同类图像;p值<0,待分类图像与训练图像是异类图像;
[0043]
步骤4.5、根据步骤4.4得到p的元素值进行判断,具体为:若p(v)≥0,则特征测试集z中第v个元素对应的待分类图像与训练图像是同类图像;否则,若p(v)<0,则特征测试集z中第v个元素对应的待分类图像与训练图像是异类图像;
[0044]
其中,v的取值范围为1到n
t
。
[0045]
有益效果
[0046]
本发明所述的一种基于hog特征及dmd的图像分类方法,与现有技术相比,具有如下有益效果:
[0047]
1.对于小样本图像、单一样本图像的识别准确率高;
[0048]
2.对于具有复杂背景的图像识别准确率高;
[0049]
3.算法时间复杂度和空间复杂度低;
[0050]
4.算法避免神经网络结果选择问题和局部最小值问题;
[0051]
5.算法对于高维、非线性分类问题具有很好的泛化性。
附图说明
[0052]
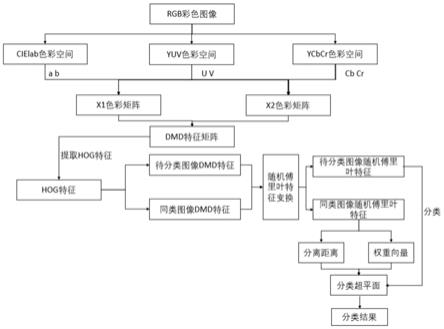
图1是本发明一种基于hog特征及dmd的图像分类方法的流程图;
[0053]
图2是本发明一种基于hog特征及dmd的图像分类方法及实施例1中iris图像数据集的示意图;
[0054]
图3是本发明一种基于hog特征及dmd的图像分类方法及实施例4中鱼类图像数据集的示意图。
具体实施方式
[0055]
下面结合附图和实施例对本发明所述的一种基于hog特征及dmd的图像分类方法做进一步说明和详细描述。
[0056]
实施例1
[0057]
本实例详细阐述了发明一种基于hog特征及dmd的图像分类方法在植物图像分类情况下的具体实施与分类结果。图1是基于hog特征及dmd的图像分类方法的流程图。
[0058]
本实例的数据集来源于uci数据库中的iris数据集,iris数据集包括三类鸢尾花图像,每类数据量为50;图2为iris数据集中的一幅图像。
[0059]
该数据集中的数据,是已经提取特征的数据,得到iris图像数据x
i
,n是数据量,为150;d是特征维度,为4;
[0060]
应用本发明所述方法,则直接从步骤3开始实施,具体为:
[0061]
步骤3.1、对于10个同类iris图像(任选iris图像中的一类数据集)特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
[0062]
其中,随机傅里叶特征变换计算公式为(2):
[0063][0064]
其中,z(x
i
)表示数据集合z中第i个数据,该数据由x
i
经公式(2)的随机傅里叶特征变换得到;x
i
为图像特征数据且其维度为1
×
d,表明每个图像特征数据包括d个种类的特征,i的变化范围为1到n且n为数据个数,σ为核带宽,本实例中σ的值为0.5;h
u
为随机生成的矩阵,矩阵中元素h
u
服从高斯分布,且h
u
的维度为d
×
1,下标u的取值范围为1到d
rf
/2;d
rf
为随机傅里叶特征变换的维度,本实例中d
rf
的值为2000;
[0065]
此步骤将数据维度人为控制在2000维度,避免了传统机械学习中采用核函数从而导致维度过高并且无法控制的问题,大大降低了算法时间复杂度和空间复杂度。
[0066]
步骤3.2、从数据集合z中随机选择一个数据w0作为初始权重向量并赋值给权重向量w;
[0067]
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
[0068]
步骤3.4、对于wz
‑
ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
[0069]
其中,平均权重向量记为w
m
;
[0070]
步骤3.5、通过随机梯度下降法选择w和w
m
间新的权重向量w
new
,并将w
new
赋值给w;
[0071]
步骤3.6、重复步骤3.3至步骤3.5,直至s次迭代后,得到趋于稳定的w
new
;
[0072]
其中,s的取值范围为大于15且小于30;
[0073]
步骤4、对剩余的140张iris图像进行分类,具体包括如下子步骤:
[0074]
步骤4.1、对剩余的140张iris图像进行预处理,得到预处理后的待分类图像;
[0075]
步骤4.2、对预处理后的图像进行特征提取,得到图像的特征;
[0076]
步骤4.3、基于图像的特征进行随机傅里叶特征变换,得到随机傅里叶特征变换的结果z;
[0077]
步骤4.4、根据步骤3得到的w
new
、ρ和步骤4.3得到的随机傅里叶特征变换结果z计算w
new z
‑
ρ的值,记为p;
[0078]
步骤4.5、根据步骤4.4得到的p值进行判断;
[0079]
其中,p值>0,待分类图像与训练图像是同类图像;p值<0,待分类图像与训练图像是异类图像;
[0080]
至此,经过步骤1到步骤4,就完成了对于图像的分类操作。
[0081]
其中,三类iris数据的同类分类准确率分别为90%、83%、90%,异类分类准确率为100%。相比于传统机械学习算法例如svm,knn等,准确率总体提升20%;相比于bp神经网络,卷积神经网络等神经网络算法,准确率总体提升5%,可以看出该算法对于小样本图像、单一样本图像、具有复杂背景图像的准确率高;同时避免了算法避免神经网络结果选择问题和局部最小值问题,对于高维、非线性分类问题具有很好的泛化性;
[0082]
实施例2
[0083]
本实例详细阐述了发明一种基于hog特征及dmd的图像分类方法在声纳图像分类情况下具体实施时的分类方法与结果。
[0084]
本实例的数据集来源于uci数据库中的sonar数据集,sonar数据集包括两类声纳图像,从岩石表面返回的声纳图像为97个样本,从金属表面返回的声纳图像为111个样本;
[0085]
该数据集中的数据,是已经提取完特征的数据,得到sonar图像数据x
i
,n是数据量,为208;d是特征维度,为60;
[0086]
应用本发明所述方法,则直接从步骤3开始实施,具体为:
[0087]
步骤3.1、对于40个同类sonar图像(任选sonar图像中的一类数据集)特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
[0088]
其中,随机傅里叶特征变换计算公式为(3):
[0089][0090]
其中,z(x
i
)表示数据集合z中第i个数据,该数据由x
i
经公式(3)的随机傅里叶特征变换得到;x
i
为图像特征数据且其维度为1
×
d,表明每个图像特征数据包括d个种类的特征,i的变化范围为1到n且n为数据个数,σ为核带宽,本实例中σ的值为0.5;h
u
为随机生成的矩阵,矩阵中元素h
u
服从高斯分布,且h
u
的维度为d
×
1,下标u的取值范围为1到d
rf
/2;d
rf
为随机傅里叶特征变换的维度,本实例中d
rf
的值为2000;
[0091]
此步骤将数据维度人为控制在2000维度,避免了传统机械学习中采用核函数从而导致维度过高并且无法控制的问题,大大降低了算法时间复杂度和空间复杂度。
[0092]
步骤3.2、从数据集合z中随机选择一个数据w0作为初始权重向量并赋值给权重向量w;
[0093]
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
[0094]
步骤3.4、对于wz
‑
ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
[0095]
其中,平均权重向量记为w
m
;
[0096]
步骤3.5、通过随机梯度下降法选择w和w
m
间新的权重向量w
new
,并将w
new
赋值给w;
[0097]
步骤3.6、重复步骤3.3至步骤3.5,直至s次迭代后,得到趋于稳定的w
new
;
[0098]
其中,s的取值范围为大于15且小于30;
[0099]
步骤4、对于待分类的sonar图像进行分类,具体包括如下子步骤:
[0100]
步骤4.1、对待分类sonar图像进行预处理,得到预处理后的待分类sonar图像;
[0101]
步骤4.2、对预处理后的待分类sonar图像进行特征提取,得到待分类sonar图像的特征;
[0102]
步骤4.3、基于待分类sonar图像的特征进行随机傅里叶特征变换,得到随机傅里叶特征变换的结果z;
[0103]
步骤4.4、根据步骤3得到的w
new
、ρ和步骤4.3得到的随机傅里叶特征变换结果z计
算w
new z
‑
ρ的值,记为p;
[0104]
步骤4.5、根据步骤4.4得到的p值进行判断;
[0105]
其中,p值>0,待分类图像与训练图像是同类图像;p值<0,待分类图像与训练图像是异类图像;
[0106]
至此,经过步骤1到步骤4,就完成了对于图像的分类操作。
[0107]
其中,整体分类准确率高于95%。相比于传统机械学习算法例如svm,knn等,准确率总体提升15%;相比于bp神经网络,卷积神经网络等神经网络算法,准确率总体提升5%,可以看出该算法对于小样本图像、单一样本图像、具有复杂背景图像的准确率高;同时避免了算法避免神经网络结果选择问题和局部最小值问题,对于高维、非线性分类问题具有很好的泛化性;
[0108]
各算法准确率如表2所示:
[0109]
表2各算法准确率统计表
[0110]
算法同类准确率异类准确率本发明方法≥95%≥95%svm≥82%≥92%knn≥80%≥90%bp神经网络≥92%≥89%卷积神经网络≥92%≥90%
[0111]
实施例3
[0112]
本实例详细阐述了发明一种基于hog特征及dmd的图像分类方法在海洋生物图像分类情况下具体实施时的分类方法与结果。
[0113]
本实例的数据集为两种鱼类图片,每类图片包括100张样本,图3中的3a和3b为该数据集的示意图。
[0114]
应用本发明所述方法,具体为:
[0115]
步骤1、对该数据集的全部图像进行基于颜色的动态模式分解;
[0116]
步骤1、具体为:
[0117]
步骤1.1、将彩色图像在rgb色彩空间中分别转换成yuv色彩空间、cielab色彩空间和ycbcr色彩空间,得到基于上述色彩空间的色度信息(a,b,u,v,cb,cr);
[0118]
步骤1.2、对色度信息(a,b,u,v,cb,cr)进行矢量化,形成mn
×
1个向量,每个向量包含对应于每个色彩空间的像素数据;
[0119]
其中,m
×
n为彩色图像的尺寸;
[0120]
步骤1.3、将上述色彩空间进行结合,分别生成矩阵x1和矩阵x2;
[0121]
其中,矩阵x1=(a,u,cb),矩阵x2=(b,v,cr);
[0122]
步骤1.4、基于上述矩阵x1和矩阵x2,构建色彩矩阵和矩阵
[0123]
其中,色彩矩阵色彩矩阵色彩矩阵和矩阵的维度为mn
×
4;
[0124]
步骤1.5、基于步骤1.4中建立的色彩矩阵和建立关系矩阵a;
[0125]
其中其中为时序矩阵的广义逆矩阵;
[0126]
步骤1.6、对步骤1.4建立的时序矩阵进行奇异值分解;
[0127]
其中,时序矩阵通过奇异值分解得到的u和v是酉矩阵,σ是对角矩阵,
[0128]
v
*
是矩阵v的伴随矩阵;
[0129]
步骤1.7、基于步骤1.4中建立的时序矩阵步骤1.5建立的关系矩阵a、步骤1.6中得到的u矩阵得到近似关系矩阵
[0130]
其中u
*
是矩阵u的伴随矩阵;
[0131]
步骤1.8、基于步骤1.7得到的近似关系矩阵进行特征分解,得到特征值λ和特征向量ω以及由特征向量组成的矩阵q;
[0132]
步骤1.9、基于步骤1.4中建立的时序矩阵步骤1.6中得到的u矩阵和σ矩阵和步骤1.8得到的矩阵q建立动态模式分解的模态
[0133]
其中dmd模态其中是矩阵σ的广义逆矩阵;
[0134]
步骤1.10、基于步骤1.9得到的dmd模态建立稀疏矩阵和低秩矩阵:
[0135][0136]
其中,r为使用到的模态的个数,为动态模式分解对应的模态;α
j
为对应的系数,
ωj
实部对应动态模式分解基函数的增长或衰减,虚部对应动态模式分解的震荡,p为低秩模式。
[0137]
步骤1.11、基于步骤1.10得到的稀疏矩阵和低秩矩阵建立显著色彩矩阵
[0138]
其中w为稀疏矩阵的权重系数;
[0139]
步骤2、基于步骤1.11得到的显著色彩矩阵提取hog特征,得到提取特征后的同类图像;
[0140]
步骤3、将同类图像进行模型训练,得到新的权重向量和分离距离;
[0141]
其中,训练得到的权重向量,记为w
new
,且w
new
为特征空间的分离面的单位法向量;训练得到的分离距离,记为ρ,ρ为分离面和坐标原点的距离;
[0142]
步骤3、具体为:
[0143]
步骤3.1、对于80个同类鱼类图像(任选鱼类图像中的一类数据集)特征进行随机傅里叶特征变换,得到随机傅里叶特征变换后的数据集合z;
[0144]
其中,随机傅里叶特征变换计算公式为(5):
[0145][0146]
其中,z(x
i
)表示数据集合z中第i个数据,该数据由x
i
经公式(4)的随机傅里叶特征变换得到;x
i
为图像特征数据且其维度为1
×
d,表明每个图像特征数据包括d个种类的特征,i的变化范围为1到n且n为数据个数,σ为核带宽,本实例中σ的值为0.5;h
u
为随机生成的矩阵,矩阵中元素h
u
服从高斯分布,且h
u
的维度为d
×
1,下标u的取值范围为1到d
rf
/2;d
rf
为随机傅里叶特征变换的维度,本实例中d
rf
的值为2000;
[0147]
此步骤将数据维度人为控制在2000维度,避免了传统机械学习中采用核函数从而导致维度过高并且无法控制的问题,大大降低了算法时间复杂度和空间复杂度。
[0148]
步骤3.2、从数据集合z中随机选择一个数据w0作为初始权重向量并赋值给权重向量w;
[0149]
步骤3.3、通过黄金分割线搜索计算分离距离ρ;
[0150]
步骤3.4、对于wz
‑
ρ小于0的数据点进行聚类,再求平均后得到平均权重向量;
[0151]
其中,平均权重向量记为w
m
;
[0152]
步骤3.5、通过随机梯度下降法选择w和w
m
间新的权重向量w
new
,并将w
new
赋值给w;
[0153]
步骤3.6、重复步骤3.3至步骤3.5,直至s次迭代后,得到趋于稳定的w
new
;
[0154]
其中,s的取值范围为大于15且小于30;
[0155]
步骤4、对待分类的鱼类图像进行分类,具体包括如下子步骤:
[0156]
步骤4.1、对待分类的鱼类图像进行预处理,得到预处理后的待分类图像;
[0157]
步骤4.2、对预处理后的图像进行特征提取,得到图像的特征;
[0158]
步骤4.3、基于图像的特征进行随机傅里叶特征变换,得到随机傅里叶特征变换的结果z;
[0159]
步骤4.4、根据步骤3得到的w
new
、ρ和步骤4.3得到的随机傅里叶特征变换结果z计算w
new z
‑
ρ的值,记为p;
[0160]
步骤4.5、根据步骤4.4得到的p值进行判断;
[0161]
其中,p值>0,待分类图像与训练图像是同类图像;p值<0,待分类图像与训练图像是异类图像;
[0162]
至此,经过步骤1到步骤4,就完成了对于图像的分类操作。
[0163]
其中,分类正确率整体高于93%。相比于传统机械学习算法例如svm,knn等,准确率总体提升23%;相比于bp神经网络,卷积神经网络等神经网络算法,准确率总体提升8%,可以看出该算法对于小样本图像、单一样本图像、复杂背景图像具有更高的准确率;同时避免了算法避免神经网络结果选择问题和局部最小值问题,对于高维、非线性分类问题具有很好的泛化性;
[0164]
各算法准确率如表3所示:
[0165]
表3各算法准确率统计表
[0166]
算法同类准确率异类准确率本发明方法≥93%≥93%svm≥72%≥75%knn≥70%≥71%bp神经网络≥83%≥80%卷积神经网络≥85%≥87%
[0167]
以上所述为本发明的较佳实施例而已,本发明不应该局限于该实施例和附图所公开的内容。凡是不脱离本发明所公开的精神下完成的等效或修改,都落入本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1