一种基于深度学习的城市黑臭水体遥感识别方法
1.本发明涉及水体分类技术领域,具体涉及一种基于深度学习的城市黑臭水体遥感识别方法。
背景技术:
2.目前,城市黑臭水体的遥感识别算法多拘泥于黑臭水体光谱特征的分析,进而通过遥感影像识别黑臭水体。此类算法在单一城市识别精度较高。然而,由于黑臭水体和一般水体的光谱特性地域性差异明显,在不同城市应用时须实地采集水体光谱信息,耗时耗力;受样本量限制,该类算法适用范围小、泛化性差;并且在提取黑臭水体之前须确定水体范围,无法直接得到目标类别,在实际应用中流程繁琐、效率较低。
3.为此,本发明提出了一种新的基于深度学习的城市黑臭水体遥感识别方法。
技术实现要素:
4.为解决上述问题,本发明的目的在于提供一种利用inception
‑
v3卷积神经网络的改进模型进行城市黑臭水体遥感识别的方法,其适用城市更加广泛。
5.为实现上述目的,本发明提供了如下的技术方案。
6.一种基于深度学习的城市黑臭水体遥感识别方法,包括以下步骤:
7.获取高分辨率遥感影像集合的波段差值指数特征图;通过波段差值指数特征图与影像集合融合,获取训练数据集;
8.对训练数据集裁剪,获取黑臭水体样本集和一般水体样本集;
9.将黑臭水体样本集和一般水体样本集作为训练数据,采用迁移学习和inception
‑
v3卷积神经网络,构建并训练获得高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a;
10.将待分类高分辨率遥感影像水体样本输入训练后的高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a进行分类,获得城市黑臭水体遥感图像分类结果。
11.优选地,还包括对所述高分辨率遥感影像集合进行预处理;
12.所述预处理包括对高分辨率遥感影像集合的辐射定标、大气校正、正射校正、影像融合和近红外波段剔除。
13.优选地,所述数据集的获取包括以下步骤:
14.根据如下公式利用波段,计算得到波段差值指数特征图:
15.i=rrs(green)
‑
rrs(blue)
16.其中,rrs(blue)、rrs(green)分别为高分辨率影像的第一、二波段;
17.通过波段融合将波段差值指数特征图与影像集合进行融合,得到训练数据集。
18.优选地,所述黑臭水体样本集和一般水体样本集的获取包括以下步骤:
19.绘制并裁剪同时段高分辩率遥感影像黑臭水体样本与一般水体样本,黑臭水体样本与一般水体样本的数量均为m,且样本具有相同大小;
20.定义黑臭水体样本和一般水体样本分别为0和1,并分别选取n个样本作为网络训
练样本集,m、n为正整数且n不大于m。
21.优选地,所述高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a的训练包括以下步骤:
22.按照inception模块划分inception
‑
v3获得12种分割方案;
23.将黑臭水体样本集与一般水体样本集分别输入12种方案,根据迁移学习分别进行训练,获取训练后的高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a。
24.本发明有益效果:
25.本发明提出一种基于深度学习的城市黑臭水体遥感识别方法,该方法有效提高了城市黑臭水体识别算法的适用范围,适用城市更加广泛,且识别效率显著提高。
附图说明
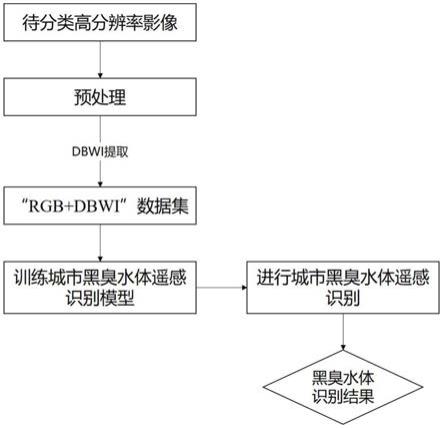
26.图1是本发明实施例的流程图;
27.图2是利用本发明识别的芜湖市鸠江区黑臭水体分布图。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
29.实施例
30.一种基于深度学习的城市黑臭水体遥感识别方法,流程图如图1所示,包括以下步骤:
31.s1:预处理高分辨率遥感影像集合,并提取波段差值指数;通过波段差值指数与预处理后的影像集合融合获取rgb+dbwi数据集。
32.具体的,预处理包括对高分辨率遥感影像集合的辐射定标、大气校正、正射校正、影像融合和近红外波段剔除。
33.波段差值指数的获取以及与预处理后的影像集合融合包括以下步骤:
34.s1.1:根据公式利用波段计算得到波段差值指数特征图:
35.i=rrs(green)
‑
rrs(blue)
36.其中,rrs(blue)、rrs(green)分别为高分辨率影像的第一、二波段。
37.s1.2:通过波段融合将波段差值指数图与预处理之后的影像进行融合,得到rgb+dbwi融合数据集。
38.s2:通过对rgb+dbwi数据集裁剪获取黑臭水体样本集和一般水体样本集,具体包括以下步骤:
39.s2.1:获取黑臭河段位置。
40.s2.2:绘制并裁剪同时段高分辨率遥感影像(gf
‑
1、gf
‑
2)黑臭水体样本与一般水体样本,黑臭水体样本与一般水体样本的数量均为m,且样本具有相同大小。
41.s2.3:定义黑臭水体样本和一般水体样本分别为0和1,并分别选取n个样本作为网络训练样本集,m、n为正整数且n不大于m。
42.s3:将黑臭水体样本集和一般水体样本集作为训练数据,采用迁移学习和
inception
‑
v3卷积神经网络构建并训练获得高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a;具体包括如下步骤:
43.s3.1:按照inception模块划分inception
‑
v3获得12种分割方案。
44.s3.2:将黑臭水体样本集与一般水体样本集分别输入12种方案,根据迁移学习分别进行训练,获取高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a。
45.s4:将待分类高分辨率遥感影像水体样本输入高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a进行分类,获得分类结果。具体包括以下步骤:
46.s4.1:对给定的待分类高分辨率遥感影像水体样本进行预处理,提取dbwi并与预处理后影像融合获得rgb+dbwi数据。
47.s4.2:将获得的rgb+dbwi数据裁剪得到目标水域水体样本。
48.s4.3:通过高分辨率城市黑臭水体遥感识别模型inception
‑
v3_7a对上述样本进行分类,判断目标样本是否为黑臭水体。
49.本实施例中,将本发明应用于国产高分光学影像黑臭水体信息提取。
50.自2014年起至2020年止,每2年提取1次芜湖市鸠江区的黑臭水体。获取4景覆盖鸠江区长江东岸的国产高分光学影像,如图2所示,其中包括3景gf
‑
2影像,拍摄时间分别是2014年12月14日(图2a)、2016年11月3日(图2b)和2020年3月19日(图2d),由于2018年获取的该区域gf
‑
2影像有薄云覆盖,以1景2018年9月5日拍摄的gf
‑
1c影像替代(图2c)。
51.表1是对图2所绘黑臭水体河段的统计结果
[0052][0053]
由图2和表1可以看出,2014年至2020年,鸠江区黑臭水体逐渐减少,表明该区域黑臭水体治理成效显著。其中,2014年鸠江区主城区水体黑臭情况已相当严重,监测区域内多处河段、沟渠都出现了不同程度的黑臭现象,主要集中在保兴垾、大阳垾和弋江站主沟;2016年末,大公沟黑臭现象基本消失,大阳垾湿地公园水系黑臭水体显著减少,而其它如弋江站主沟、保兴垾水系等水体黑臭形势仍旧严峻;到2018年9月,该区域的水体环境整体有了明显的改善,大阳垾湿地公园主体水域黑臭现象消失,不过在其部分区域出现了反黑现
象,同样情况的还有大公沟,此外,弋江站主沟、水岸星城排水渠黑臭现象全部消失;2020年3月,大阳垾湿地公园的一处水域由一般水体变为黑臭水体,除此之外,只有神山公园水系和下新塘有少量的黑臭现象。说明芜湖市在多年治理黑臭水体的过程中成果显著,基本消除了黑臭水体,不过需要注意治理过程中水体的反黑反臭问题,做到长治久清。
[0054]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1