一种基于水位与角度同步测量的船舶计重系统及方法与流程
1.本发明涉及船舶电子计重技术领域,特别是涉及一种基于水位与角度同步测量的船舶计重系统及方法。
背景技术:
2.现行的国家标准《sn/t 3023.2
‑
2012进出口商品重量鉴定规程》中对于船舶排水体积的推算,规定采用目测方法逐个读取船舶六面水尺位置的吃水数值,并进一步依据船舶静水力图表推算船舶的排水体积,作为船舶载重量推算的关键步骤。
3.但现有的推算方法在实际生产活动中存在影响测量精度的不足之处:一是大多数码头海况下难以达到标准规定的测量环境要求,使得船舶在水中始终处于不稳定姿态,并且船舶周围波浪的频率和振幅不规律,逐一读取六面水尺获得的是六个不同船舶倾斜状态下的吃水数值,造成测量误差和误差偏差方向的不确定性;二是水尺刻度线的最小分度值通常为20厘米,肉眼根据水面以上的刻度线到水面的距离进行估读,合理的误差在最小分度值的10
‑
20%,即2
‑
4厘米,将造成直接观测误差,且误差偏差方向不具确定性,误差的范围进一步根据测量人员的经验、观测位置、现场风浪情况产生进一步增大的可能。
技术实现要素:
4.有鉴于此,本发明的目的在于提供一种基于水位与角度同步测量的船舶计重系统及方法,以解决现有技术中通过肉眼或电子测量设备单体逐个估读水尺数值由于读数精度不够和读数时间不同步造成的偏差较大的问题。
5.为达到上述目的,本发明一方面提供一种基于水位与角度同步测量的船舶计重系统,包括
6.采集模块,用于同步采集并上报船舶上多个位置点的水位高度测量值、纵倾角度测量值和纵倾角角速度测量值;以及
7.与所述采集模块通信连接的计算服务器,用于对所述采集模块发送同步指令、数据采集指令以及接收并处理所述采集模块上报的数据,计算得到船舶的排水体积;
8.所述计算服务器内置有船舶图纸尺寸数据库、安装校正数据库、时钟同步模块、采集指令模块、测量数据预处理模块以及计算模块,其中:
9.所述船舶图纸尺寸数据库用于预先存储船舶图纸尺寸数据;
10.所述安装校正数据库用于存储所述采集模块在安装过程中产生的测量偏移值;
11.所述时钟同步模块用于发送同步指令对所述采集模块进行时间同步;
12.所述采集指令模块用于根据用户的操作向所述采集模块发送数据采集指令,所述数据采集指令包含采集起始时间点、采集的数据数量和采集过程中相邻两个采集数据的采集时间点的固定间隔设定值;
13.所述测量数据预处理模块用于根据所述采集模块上报的水位高度测量值、纵倾角度测量值、纵倾角角速度测量值以及所述安装校正数据库中存储的测量偏移值来实施数据
的安装校正和整合以生成实时动态测量数据表,并根据所述实时动态测量数据表的数据随时间的变化特征完成一个完整纵倾运动周期的数据裁剪,进而计算生成期望平衡态测量数组;
14.所述计算模块用于根据所述期望平衡态测量数组以及所述船舶尺寸数据库中存储的船舶图纸尺寸数据计算船舶的排水体积,进而得到船舶重量。
15.进一步的,所述采集模块包括沿船舶的中纵剖面对称设置在船艉左舷侧和船艉右舷侧的两个水位测量节点以及设置在船舶左舷侧和船舶右舷侧且分别对应于船舶前部、中部和后部的两个前部角度测量节点、两个中部角度测量节点以及两个后部角度测量节点;
16.所述水位测量节点用于根据所述计算服务器发送的数据采集指令采集并上报船艉处水平面与对应侧水位测量节点之间的高度差,所述角度测量节点用于根据所述计算服务器发送的数据采集指令采集并上报该角度测量节点在安装位置处的纵倾角度测量值和纵倾角角速度测量值。
17.进一步的,所述船舶图纸尺寸数据包括船舶的夏季载重线所标记的船舶设计载重吃水深度值、各测量节点安装中心之间的距离在船舶中纵剖面上的投影距离、两个水位测量节点安装中心的间距在船舶横向剖面上的投影距离以及自船底平面沿船舶高度方向做平行于船底平面的等距切片而生成的切片截面的截面积、切片截面中船舶的艏艉最大长度以及切片截面以下的船体累计体积所组成的数据表。
18.进一步的,所述测量偏移值包括水位测量节点安装后的测量零刻度与船舶夏季载重线的垂直高度差以及各角度测量节点安装后的初始纵倾角度测量值与安装纵倾角度实际值的偏移差值,所述安装纵倾角度实际值的计算公式如下:
[0019][0020][0021]
y
a
=arctan[(h
a
‑
h
m
)/l
m
];
[0022]
其中:y
f
,y
m
,y
a
分别为船舶前部、中部和后部角度测量节点的安装纵倾角度实际值;h
f
为采用目视读船舶实际前部水尺标线的吃水深度读数或在船舶前部实际水尺标线位置使用电子测量工具获得的吃水深度读数;h
m
为采用目视读船舶实际中部水尺标线的吃水深度读数或在船舶实际中部水尺标线位置使用电子测量工具获得的吃水深度读数;h
a
为采用目视读船舶实际后部水尺标线的吃水深度读数或在船舶实际后部水尺标线位置使用电子测量工具获得的吃水深度读数;l
m
为船舶左舷侧或右舷侧的后部角度测量节点和中部角度测量节点的安装中心之间的间距在船舶中纵剖面的投影距离;l
f
为船舶左舷侧或右舷侧的前部角度测量节点和中部角度测量节点的安装中心之间的间距在船舶中纵剖面的投影距离。
[0023]
进一步的,所述测量数据预处理模块包括数据整合单元、数据裁剪单元以及期望平衡态数组生成单元,其中:
[0024]
所述数据整合单元用于接收采集模块上报的水位高度测量值、纵倾角度测量值以及纵倾角角速度测量值,并基于所述安装校正数据库中存储的测量偏移值对水位高度测量值以及纵倾角度测量值进行偏移校正,得到水位高度校正值和纵倾角度校正值;以及以每一数据对应的采集时间点为索引对水位高度校正值、纵倾角度校正值以及纵倾角角速度测
量值进行关联重整,生成实时动态测量数据表;
[0025]
所述数据裁剪单元用于裁剪所述实时动态测量数据表中的数据,生成纵倾运动周期动态数据表;
[0026]
所述期望平衡态数组生成单元用于根据所述纵倾运动周期动态数据表中的数据计算出船舶在一个完整纵倾运动周期中运动平衡时间点关联的平衡态水位高度值和平衡态纵倾角度值,形成期望平衡态测量数组。
[0027]
进一步的,所述数据裁剪单元还用于根据所述实时动态测量数据表中对应船艉左舷侧和船艉右舷侧的两个水位高度校正值的算术平均值、纵倾角度校正值以及纵倾角角速度测量值的其中任一类数据在本次采集周期内的变化趋势,选取两个相对极大值或两个相对极小值对应的采集时间点,视为一个完整纵倾运动周期,并以所述完整纵倾运动周期内的采集时间点关联的水位高度校正值、纵倾角度校正值和纵倾角角速度测量值构成所述纵倾运动周期动态数据表。
[0028]
进一步的,所述期望平衡态数组生成单元还用于对所述纵倾运动周期动态数据表中的所有水位高度校正值以及所有纵倾角度校正值分别计算对应的算术平均值或分别取中位数,并将所述算数平均值或中位数视为对应的平衡态水位高度值和平衡态纵倾角度值,形成所述期望平衡态测量数组。
[0029]
进一步的,所述期望平衡态数组生成单元还用于查询所述纵倾运动周期动态数据表中绝对值最大的纵倾角角速度测量值所关联的采集时间点,将所述关联的采集时间点对应的水位高度校正值和纵倾角度校正值视为平衡态水位高度值和平衡态纵倾角度值,形成所述期望平衡态测量数组。
[0030]
进一步的,所述计算模块还用于根据所述期望平衡态测量数组中两个水位测量节点对应的水位高度值计算船舶在横倾修正后的船艉水位高度;然后查询所述船舶图纸尺寸数据库,计算横倾修正后的船艉吃水深度、计算对应船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积以及计算对应船艉吃水深度位置处平行于船底平面的切片截面与实际水平面构成的纵倾楔形体的体积;进而计算得到船舶在不考虑垂拱变形修正时的排水体积。
[0031]
进一步的,所述计算模块根据如下公式计算得到所述横倾修正后的船艉水位高度:
[0032][0033]
其中:h
e
为横倾修正后的船艉水位高度,h
e101
,h
e102
分别为船艉左舷侧和船艉右舷侧的水位测量节点对应的所述期望平衡态测量数组中的平衡态水位高度值;
[0034]
所述计算模块根据如下公式计算得到所述横倾修正后的船艉吃水深度:
[0035]
h=h
max
‑
h
e
[0036]
其中:h为横倾修正后的船艉吃水深度,h
max
船舶夏季载重线所标记的船舶设计载重吃水深度值;
[0037]
所述计算模块根据如下公式分别计算得到对应船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积:
[0038][0039][0040][0041]
其中:s
h
,l
h
,v
h
分别为船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积,h
n
,h
n+1
分别为船舶图纸尺寸数据库中与修正后的船艉吃水深度h对应的两个相邻等距切片的高度,且有h
n
≤h<h
n+1
,s
n
,l
n
,v
n
分别船舶图纸尺寸数据库中切片高度h
n
对应的切片截面的截面积、船舶的艏艉最大长度和切片截面以下的船体累积体积,s
n+1
,l
n+1
,v
n+1
分别船舶图纸尺寸数据库中切片高度h
n+1
对应的切片截面的截面积、船舶的艏艉最大长度和切片截面以下的船体累积体积;
[0042]
所述计算模块根据如下公式计算得到所述纵倾楔形体的体积:
[0043][0044]
其中:δv为所述纵倾楔形体的体积,ye0为船舶整体的纵倾角度值;
[0045]
所述计算模块根据如下公式计算得到船舶在不考虑垂拱变形修正时的排水体积:
[0046]
v
e0
=v
h
‑
δv。
[0047]
进一步的,所述计算模块还用于对船舶中部垂拱变形后所形成的垂拱楔形体的体积进行垂拱修正,计算得到垂拱修正后的船舶排水体积;
[0048]
所述计算模块根据如下公式计算所述垂拱楔形体的体积:
[0049][0050]
其中:v
sag
为船舶在发生垂拱变形时形成的垂拱楔形体的体积;h
sag
为所述垂拱楔形体的高度,s
h
为船艉吃水深度位置处平行于船底平面的切片截面的截面积;
[0051]
所述垂拱楔形体的高度h
sag
的计算公式如下:
[0052][0053]
其中:l
f1
,l
f2
分别为船舶左舷侧和船舶右舷侧的前部角度测量节点与中部角度测量节点安装中心之间的间距在船舶中纵剖面上的投影距离;l
m1
,l
m2
分别为船舶左舷侧和船舶右舷侧的中部角度测量节点与后部角度测量节点安装中心之间的间距在船舶中纵剖面上的投影距离;ye
201
,ye
202
,ye
203
分别为船舶左舷侧的前部、中部和后部的平衡态纵倾角度值;ye
204
,ye
205
,ye
206
分别为船舶左舷侧的前部、中部和后部的平衡态纵倾角度值;
[0054]
所述计算模块根据如下公式计算得到所述垂拱修正后的船舶排水体积:
[0055]
v
e
=v
e0
+v
sag
;
[0056]
其中:v
e
为船舶的排水体积。
[0057]
进一步的,还包括一网络交换机、一无线路由器以及一显示控制终端,其中:
[0058]
所述网络交换机通过以太网线分别与所述采集模块、计算服务器、路由器以及显示控制终端相连,用于实现所述采集模块、计算服务器、路由器以及显示控制终端之间的通信;
[0059]
所述无线路由器用于接入互联网,用于将计算得到的船舶排水体积传输至云端服务器。
[0060]
所述显示控制终端用于识别用户的操作,以实现人机交互,以及识别云端服务器的上报指令和参数配置。
[0061]
本发明的另一方面提供一种基于水位与角度同步测量的船舶计重方法,利用所述基于水位与角度同步测量的船舶计重系统实现,具体包括以下步骤
[0062]
s1:建立船舶图纸尺寸数据库,并将船舶图纸尺寸数据预先存入所述船舶图纸尺寸数据库;
[0063]
s2:建立安装校正数据库,存储采集模块在安装过程中产生的测量偏移值;
[0064]
s3:使用网络标准时间或gps标准时间将计算服务器与采集模块进行时间同步;
[0065]
s4:采集模块按照采集起始时间点、采集的数据数量和采集过程中相邻两个数据的采集时间点的固定间隔设定值同步采集数据,得到水位高度测量值、纵倾角度测量值以及纵倾角角速度测量值;
[0066]
s5:测量数据预处理,根据安装校正数据库中的测量偏移值对所述水位高度测量值和纵倾角度测量值进行偏移校正得到水位高度校正值和纵倾角度校正值并重整数据得到实时动态测量数据表;从实时动态测量数据表中裁剪提取完整纵倾运动周期内的水位高度校正值、纵倾角度校正值以及纵倾角角速度测量值,形成纵倾运动周期动态数据表;并根据纵倾运动周期动态数据表筛选或计算出平衡态水位高度值和平衡态纵倾角度值,形成期望平衡态测量数组;
[0067]
s6:计算船舶排水体积,根据期望平衡态测量数组和船舶图纸尺寸数据,计算船舶的排水体积,进一步将船舶的排水体积与船舶所在地的水密度和重力加速度相乘,得到船舶重量。
[0068]
本发明利用水位测量节点和角度测量节点同步采集船舶在同一姿态下的水位高度测量值以及船舶对应位置的纵倾角度测量值和纵倾角角速度测量值,基于船舶在完整的纵倾运动周内的同步采集的测量数据对船舶的排水体积进行计算,使得计算结果更加准确;另,采用电子测量设备获取船艉的吃水深度值,在船体3d图纸的等距切片数据基础上将船舶排水体积分割为船艉吃水深度对应的切片截面以下累计体积、船体纵倾形成的纵倾楔形体、垂拱形成的纵倾楔形体分别计算合并结果,进一步提高了计算精度,能够真实反映船舶的实际重量。
[0069]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0070]
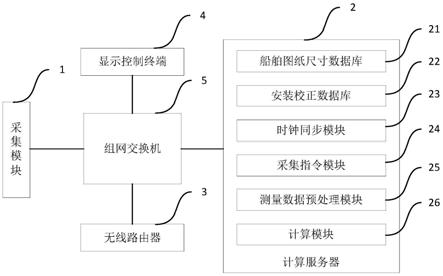
图1为本发明实施例一的一种基于水位与角度同步测量的船舶计重系统的系统框图。
[0071]
图2为采集模块的安装示意图。
[0072]
图3为采集模块的结构示意图。
[0073]
图4为数据采集的线程示意图。
[0074]
图5为测量数据预处理模块的结构示意图。
[0075]
图6为船舶纵倾角度测量值随时间变化的曲线图。
[0076]
图7为对船舶进行切片处理的示意图。
[0077]
图8为船舶发生垂拱变形的示意图。
[0078]
图9为本发明实施例二的一种基于水位与角度同步测量的船舶计重方法的流程图。
具体实施方式
[0079]
下面通过具体实施方式进一步详细说明:
[0080]
实施例一
[0081]
如图1所示,为本实施例的一种基于水位与角度同步测量的船舶计重系统的系统框图。本实施例的基于水位与角度同步测量的船舶计重系统包括安装在船舶上的采集模块1以及安装在船舶上的计算服务器2、无线路由器3、显示控制终端4和支持poe供电功能的网络交换机5,所述采集模块1、计算服务器2、无线路由器3和显示控制终端4均通过以太网与所述网络交换机5相连,以组成对应的以太网络,实现各部件间的数据和指令的传输。在该以太网络中,所述采集模块1和显示控制终端4作为客户端接入所述以太网络中,用于采集测量值数据以及识别用户的操作指令;而所述计算服务器2则作为服务端接入所述以太网络中,用于对采集到的测量值数据进行处理以及根据用户的操作指令发出对应的控制指令。具体的,所述采集模块1实时地同步采集并上报船舶上多个位置点的水位高度测量值、纵倾角度测量值以及纵倾角角速度测量值等数据;计算服务器2根据所述采集模块1上报的水位高度测量值、纵倾角度测量值以及纵倾角角速度测量值等数据计算得到船舶的排水体积,进而得到船舶的重量;所述无线路由器3通过公网无线通讯接入互联网,在所述计算服务器2计算出排水体积之后将排水体积按照设定周期或应要求上传至云服务器中供用户查询。所述显示控制终端4用于识别用户的操作,以实现用户与计算服务器2之间的人机交互。在其他的实施例中,所述采集模块1还可以是通过wifi无线方式与所述无线路由器3相连,而所述计算服务器2、路由器3和显示控制终端4均通过以太网线与所述网络交换机5相连;或者省略网络交换机5,使采集模块1通过wifi无线方式与所述无线路由器3相连,同时,所述计算服务器2和显示控制终端4通过以太网线与所述无线路由器3相连,以实现各部件间的数据和指令的传输。
[0082]
如图2
‑
3所示,所述采集模块1包括两个水位测量节点101、102以及六个角度测量节点201、202、203、204、205、206,六个角度测量节点201、202、203、204、205、206又分为两个前部角度测量节点201、204、两个中部角度测量节点202、205以及两个后部角度测量节点203、206。两个水位测量节点101、102沿所述船舶的中纵剖面对称安装在所述船艉左舷侧和
船艉右舷侧;所述水位测量节点101、102分别采集其与对应侧船艉水平面之间的高度差作为水位高度测量值。两个前部角度测量节点201、204分别对应安装在所述船舶前部的左舷侧和右舷侧,两个中部角度测量节点202、205分别对应安装在所述船舶中部的左舷侧和右舷侧,两个后部角度测量节点203、206分别对应安装在所述船舶后部的左舷侧和右舷侧;六个角度测量节点201、202、203、204、205、206分别采集船舶左舷侧和右舷侧的前部、中部和后部位置的纵倾角度测量值和纵倾角角速度测量值。在本实施例中,所述六个角度测量节点201、202、203、204、205、206安装位置的纵向投影分别与船舶六面水尺的位置一一对应。在其他的实施例中,所述六个角度测量节点201、202、203、204、205、206还可根据船舶的自身结构尺寸进行安装,如将两个前部角度测量节点201、204分别安装在船舶的船艏柱与龙骨结合点在船舶中纵剖面投影位置的左舷侧和右舷侧;将两个中部角度测量节点202、205分别安装在船舶的龙骨中点在船舶中纵剖面投影位置的左舷侧和右舷侧;以及将两个后部角度测量节点203、206分别安装在船舶的船艉柱与龙骨结合点在船舶中纵剖面投影位置的左舷侧和右舷侧。
[0083]
所述水位测量节点101、102包括水位传感器1011和第一网络控制板1012,所述水位传感器1011与所述第一网络控制板1012之间使用串口数据连接,所述第一网络控制板1012通过以太网络接口从所述支持poe的网络交换机5获得外部供电,内部电压转换后对所述水位传感器1011进行供电;且所述第一网络控制板1012还可将水位传感器1011采集到的水位高度测量值暂存,向所述计算服务器2上报。所述角度测量节点201、202、203、204、205、206包括角度传感器2011和第二网络控制板2012,所述角度传感器2011与所述第二网络控制板2012之间使用串口数据连接,所述第二网络控制板2012通过以太网络接口从所述支持poe的网络交换机5获得外部供电,内部电压转换后以对所述角度传感器2011进行供电;且所述第二网络控制板2012还可将角度传感器2011采集到的纵倾角度测量值以及纵倾角角速度测量值暂存,向所述计算服务器2上报。
[0084]
所述计算服务器2内置有船舶图纸尺寸数据库21、安装校正数据库22、时钟同步模块23、采集指令模块24、测量数据预处理模块25以及计算模块26,以根据水位测量节点101、102采集到的水位高度测量值以及角度测量节点201、202、203、204、205、206采集到的纵倾角度测量值和纵倾角角速度测量值计算得到船舶的排水体积,进而得到船舶的载重。
[0085]
所述船舶图纸尺寸数据库21中预先存储有船舶图纸尺寸数据。在本实施例中,所述船舶图纸尺寸数据包括但不限于船舶的夏季载重线所标记的船舶设计载重吃水深度值h
max
、各测量节点安装中心之间的间距在船舶中纵剖面上的投影距离l
f
,l
m
,l
a
(其中:l
f
为船舶左舷侧或右舷侧的前部角度测量节点201、204与对应侧中部角度测量节点202、205安装中心之间的间距在船舶中纵剖面上的投影距离;l
m
为船舶左舷侧或右舷侧的中部角度测量节点202、205与对应侧后部角度测量节点203、206安装中心之间的间距在船舶中纵剖面上的投影距离;l
a
为船舶左舷侧或右舷侧的后部角度测量节点203、206与对应侧水位测量节点101、102安装中心之间的间距在船舶中纵剖面上的投影距离)以及沿船舶高度方向做平行于船底平面的等距切片截面形成的以高度值h为索引,所述切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
以及切片截面以下的船体累计体积v
h
所组成的数据表。
[0086]
在本实施例中,虽然上述船舶左舷侧和右舷侧各角度测量节点安装中之间的间距在船舶中纵剖面上的投影距离均用字母“l
f
,l
m
,l
a”表示,但由于各角度测量节点进行安装
时,可能存在船舶左舷侧和右舷侧的角度测量节点安装后并不一定完全对称,可以理解的,当l
f
,l
m
,l
a
分别表示船舶左舷侧和右舷侧对应角度测量节点安装中心之间的间距在船舶中纵剖面上的投影距离时,其值并不必然相等,必要时,可以l
f1
,l
m1
,l
a1
和l
f2
,l
m2
,l
a2
分别表示船舶左舷侧和右舷侧对应角度测量节点安装中心之间的间距在船舶中纵剖面上的投影距离,以对左、右的参数加以区分。
[0087]
由于水位测量节点101、102和角度测量节点201、202、203、204、205、206在安装后,由于安装表面的平面度差异和安装位置差异,因此在安装完成后需对各测量节点进行安装偏移校正。
[0088]
所述安装校正数据库22中预先存储有水位测量节点101、102和角度测量节点201、202、203、204、205、206在安装过程中产生的测量偏移值,所述测量偏移值包括水位测量偏移值和纵倾角测量偏移值。在本实施例中,所述水位测量偏移值为水位测量节点101、102安装后的测量零刻度与船舶夏季载重线的垂直高度差δh;所述纵倾角测量偏移值为各角度测量节点201、202、203、204、205、206安装后的初始纵倾角度测量值与安装纵倾角度实际值的偏移差值,所述前部角度测量节点、中部角度测量节点和后部角度测量节点对应的安装纵倾角度实际值分别表示为:
[0089][0090][0091]
y
a
=arctan[(h
a
‑
h
m
)/l
m
](3)
[0092]
其中:y
f
,y
m
,y
a
分别为船舶前部、中部和后部角度测量节点的安装纵倾角度实际值;h
f
为采用目视读船舶实际前部水尺标线的吃水深度读数或在船舶前部实际水尺标线位置使用电子测量工具获得的吃水深度读数;h
m
为采用目视读船舶实际中部水尺标线的吃水深度读数或在船舶实际中部水尺标线位置使用电子测量工具获得的吃水深度读数;h
a
为采用目视读船舶实际后部水尺标线的吃水深度读数或在船舶实际后部水尺标线位置使用电子测量工具获得的吃水深度读数;l
m
为船舶左舷侧或右舷侧的后部角度测量节点203、206和中部角度测量节点202、205的安装中心之间的间距在船舶中纵剖面的投影距离;l
f
为船舶左舷侧或右舷侧的前部角度测量节点201、204和中部角度测量节点202、205的安装中心之间的间距在船舶中纵剖面的投影距离。
[0093]
所述时钟同步模块23在各测量节点作为以太网客户端注册到所述计算服务器2时执行操作,使用网络标准时间遵从ntp协议将计算服务器2与水位测量节点101、102和角度测量节点201、202、203、204、205、206完成时间同步,使得各水位测量节点101、102和角度测量节点201、202、203、204、205、206内部的时钟保持一致,以实现相同的采集时间点对应船舶同一姿态。
[0094]
如图4所示,所述采集指令模块24根据用户在显示控制终端4执行的数据采集操作,向所述水位测量节点101、102和角度测量节点201、202、203、204、205、206同步发起数据采集指令,所述数据采集指令包括采集起始时间点t0、采集的数据数量n以及采集过程中相邻两个采集数据的采集时间点之间的固定间隔设定值δt(即第n
‑
1个数据的采集时间点t
n
‑1与第n数据采集时间点t
n
之间的时间间隔,且δt大于水位传感器1011和角度传感器2011的数据采集周期),则第n个数据对应的采集时间点t
n
为t0+n*δt。所述采集时间起始点
t0可以是数据采集指令发出后的一个未来时间点,也可以是相对数据采集指令发出时间点起算的一个延迟时间段。
[0095]
所述数据采集指令由所述第一网络控制板1012和第二网络控制板2012执行,执行过程包括两个并行的执行线程,具体的其中第一执行线程为所述水位测量节点101、102中的第一网络控制板1012从t0开始连续读取水位传感器1011的水位高度测量值(为水位传感器1011的连续上报测量值的个数)暂存在所述第一网络控制板1012的寄存器中,角度测量节点201、202、203、204、205、206中的第二网络控制板2012从t0开始持续读取角度传感器2011纵倾角度测量值[y0,y1,...,y
t
](t为角度传感器2011的连续上报测量值的个数)和纵倾角角速度测量值[av0,av1,...,av
t
]暂存在所述第二网络控制板2012的寄存器中;其中网络控制板寄存器内以下一时刻读取到的水位高度测量值纵倾角度测量值y
t+1
和纵倾角角速度测量值av
t+1
覆盖刷新上一时刻对应的测量值。具体的其中第二执行线程由第一网络控制板1012从(t0+δt)开始,以δt为间隔周期,(δt大于水位传感器1011和角度传感器2011的数据采集周期),从寄存器中读取测量值数据,一共读取n次;由第二网络控制板2012从(t0+δt)开始,以δt为间隔周期从寄存器中读取测量值数据,一共读取n次;在所述第二执行线程中,所述第一网络控制板1012和第二网络控制板2012从对应的寄存器中读取到水位传感器1011和角度传感器2011最接近同步读取时刻的测量值,即在采集时间点t1读取到的测量值集合为[h1,y3,av3],在采集时间点t2读取到的测量值集合为[h2,y6,av6],持续读取n次数据后得到的实时动态测量数据表
[0096]
如图5所示,所述测量数据预处理模块25包括数据整合单元251、数据裁剪单元252以及平衡态数组生成单元253,所述数据整合单元251提取所述采集模块1上报的水位高度测量值、纵倾角度测量值和纵倾角角速度测量值,根据所述水位测量偏移值和纵倾角测量偏移值分别对所述水位高度测量值和纵倾角度测量值进行偏移校正得到水位高度校正值和纵倾角度校正值,并以每一数据对应的采集时间点为索引对水位高度校正值、纵倾角度校正值以及纵倾角角速度测量值进行关联重整,生成实时动态测量数据表。所述数据裁剪单元252对所述实时动态测量数据表中的数据进行数据裁剪,获取船舶在一个完整的间隔周期内的数据,生成纵倾运动周期动态数据表。所述平衡态数组生成单元253根据所述纵倾运动周期动态数据表中的数据,确定船舶在完整纵倾运动周期中期望平衡态的采集时间点,并筛选或计算出该采集时间点对应的水位高度校正值和纵倾角度校正值得到船舶在期望平衡态时刻的平衡态水位高度值和平衡态纵倾角度值,形成期望平衡态测量数组。
[0097]
所述数据整合单元根据如下公式计算水位高度校正值和纵倾角度校正值:
[0098]
h
c
=h
t
‑
δh(4)
[0099]
y
c
=y
t
‑
δy(5)
[0100]
其中:h
c
为水位高度校正值;h
t
为水位测量节点10、102上报的水位高度测量值,即δh为安装校正数据库中存储的水位测量节点101、102安装后的测量零刻度面与船舶夏季载重线之间的垂直高度差;y
c
为纵倾角度校正值;y
t
为角度测量节点201、202、203、204、205、206上报的纵倾角度测量值,即y3,y6,...,y
t
;δy为安装校正数据库中存储的
对应角度测量节点201、202、203、204、205、206的偏移差值。
[0101]
如图6所示,以所述实时动态测量数据表中纵倾角度校正值为纵坐标、以所述采集时间点为横坐标绘制纵倾角度校正值随采集时间变化的曲线图,由该曲线图可以看出,船舶的动态运动过程可近似看成一频率和振幅随机变化的正弦波曲线。由于用户所设定的采集时间起始点t0具有随机性,往往该采集起始时间点t0与上述正弦曲线的原点并不重合,因此,在进行数据分析时,需对所述实时动态测量数据表做一个完整纵倾运动周期的数据裁剪以保证统计分析的源数据完整性。具体的,所述数据裁剪单元252根据纵倾角度校正值随采集时间变化的曲线图,截取船舶在一个完整纵倾运动周期内的采集时间点而舍弃其余采集时间点,并以形成纵倾运动周期动态数据表。所述纵倾运动周期a所形成的纵倾运动周期动态数据表可表示为[(h
b
,y
b
,av
b
),...,(h
d
,y
d
,av
d
)],所述纵倾运动周期b所形成的纵倾运动周期动态数据表可表示为[(h
a
,y
a
,av
a
),...,(h
c
,y
c
,av
c
)]。
[0102]
在本实施例中,所述平衡态数组生成单元253在根据纵倾运动周期动态数据表生成期望平衡态测量数组时,可对所述纵倾运动周期动态数据表中的所有水位高度校正值以及所有纵倾角度校正值分别做算术平均得到的平衡态水位高度值和平衡态纵倾角度值,形成所述期望平衡态测量数组[he,ye]。
[0103]
在其他的实施方式中,所述期望平衡态测量数组[he,ye]还可通过如下方式得到:
[0104]
所述期望平衡态数组生成单元253还可以是对所述纵倾运动周期动态数据表中的所有水位高度校正值以及所有纵倾角度校正值分别取中位数得到的平衡态水位高度值和平衡态纵倾角度值,形成所述期望平衡态测量数组[he,ye];
[0105]
或者
[0106]
所述期望平衡态数组生成单元253还可以查询纵倾运动周期动态数据表中绝对值最大的纵倾角角速度测量值所关联的采集时间点,将所述关联的采集时间点对应的水位高度校正值和纵倾角度校正值视为平衡态水位高度值和平衡态纵倾角度值,形成所述期望平衡态测量数组。
[0107]
所述计算模块26根据所述期望平衡态测量数组中两个水位测量节点101、102对应的平衡态水位高度值计算船舶在横倾修正后的船艉水位高度;然后查询船舶图纸尺寸数据库21,计算横倾修正后的船艉吃水深度、计算对应船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积以及计算出对应船艉吃水深度位置处平行于船底平面的切片截面与实际水平面构成的船体局部纵倾楔形体的体积;进而计算得到船舶在不考虑垂拱变形修正时的排水体积。
[0108]
具体的,由于两个水位测量节点101、102沿船舶的中纵剖面对称设置,当船舶在恢复至横倾水平后,所述横倾修正后的船艉水位高度he即为船艉入水点位置与水位测量节点101、102的高度差,因此,所述横倾修正后的船艉水位高度he可表示为:
[0109][0110]
其中:h
e
为横倾修正后的船艉水位高度,h
e101
,h
e102
分别为船艉左舷侧和船艉右舷侧的水位测量节点101、102对应的平衡态水位高度值。
[0111]
所述计算模块26通过查询船舶图纸尺寸数据库21,进而计算得到所述横倾修正后的船艉吃水深度h:
[0112]
h=h
max
‑
he(7)
[0113]
其中:h为横倾修正后的船艉吃水深度,h
max
船舶夏季载重线所标记的船舶设计载重吃水深度值。
[0114]
如图7所示,所述计算模块26在计算对应船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积时,以船艉处水平面位置的船艉吃水深度h做平行于船舶底面的水平切片,并以船艉吃水深度h为索引,在所述船舶图纸尺寸数据21中查询船艉吃水深度h临近的两个等距切片高度h
n
,h
n+1
对应的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积,分别计算得到船舶在船艉吃水深度h位置处平行于船底平面的切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
和切片截面以下的船体累积体积v
h
:
[0115][0116][0117][0118]
其中:s
h
,l
h
,v
h
分别为船艉吃水深度位置处平行于船底平面的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积,h
n
,h
n+1
分别为船舶图纸尺寸数据库中与修正后的船艉吃水深度h对应的两个相邻等距切片的高度,且有h
n
≤h<h
n+1
,s
n
,l
n
,v
n
分别船舶图纸尺寸数据库中切片高度h
n
对应的切片截面的截面积、船舶的艏艉最大长度和切片截面以下的船体累积体积,s
n+1
,l
n+1
,v
n+1
分别船舶图纸尺寸数据库中切片高度h
n+1
对应的切片截面的截面积、船舶的艏艉最大长度和切片截面以下的船体累积体积。
[0119]
所述计算模块26再根据切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
计算得到所述纵倾楔形体的体积δv:
[0120][0121]
其中:δv为所述纵倾楔形体的体积;ye0为船舶整体的纵倾角度值,在本实施例中,所述船舶整体的纵倾角度值可通过将船舯两个中部角度测量节点202、205平衡态纵倾角度值的算术平均值近似为船舶整体的纵倾角度值ye0。
[0122]
进而,所述计算模块26再根据所述纵倾楔形体的体积δv以及船舶在切片截面以下的船体累积体积v
h
,计算所述船舶在不考虑垂拱变形修正时的排水体积v
e0
:
[0123]
v
e0
=v
h
‑
δv(12)
[0124]
其中:当船舶处于艉倾状态时,船舶整体纵倾角ye0大于零,δv为正值;当船舶处于艏倾状态时,船舶整体倾角ye0小于零,δv为负值。
[0125]
如图8所示,由于船舶中部在实际环境工况中会产生一定程度的垂拱变形,考虑到由垂拱变形产生的船舶排水体积的变化,所述计算模块26还对所述船舶在发生垂拱变形后所形成的垂拱楔形体的体积进行计算。具体的,当船舶发生垂拱变形时,其变形形状可近似
视为一个垂拱楔形体,所述垂拱楔形体的底面积可近似为船艉吃水深度h位置处平行于船底平面的切片截面的截面积s
h
,进而计算垂拱楔形体的高度以求得所述垂拱楔形体的体积。
[0126]
所述垂拱楔形体的高度h
sag
的计算公式为:
[0127][0128]
其中:l
f1
,l
f2
分别为船舶左舷侧和船舶右舷侧的前部角度测量节点201、204与中部角度测量节点202、205安装中心之间的间距在船舶中纵剖面上的投影距离;l
m1
,l
m2
分别为船舶左舷侧和船舶右舷侧的中部角度测量节点202、205与后部角度测量节点203、206安装中心之间的间距在船舶中纵剖面上的投影距离;ye
201
,ye
202
,ye
203
分别为船舶左舷侧的前部、中部和后部的平衡态纵倾角度值;ye
204
,ye
205
,ye
206
分别为船舶左舷侧的前部、中部和后部的平衡态纵倾角度值。
[0129]
在本实施例中,当船舶处于中垂状态时,船舶左舷侧和右舷侧各角度测量节点对应的平衡态纵倾角度值具有如下关系:ye
201
>ye
202
>ye
203
,ye
204
>ye
205
>ye
206
,此时垂拱楔形体的高度h
sag
为正值;当船舶处于中拱状态时,船舶左舷侧和右舷侧各角度测量节点对应的平衡态纵倾角度值具有如下关系:ye
201
<ye
202
<ye
203
,ye
204
<ye
205
<ye
206
,此时垂拱楔形体的高度h
sag
为负值。
[0130]
根据所述垂拱楔形体的高度h
sag
可计算得到垂拱楔形体的体积v
sag
:
[0131][0132]
最终,根据所述船舶在不考虑垂拱变形修正时的排水体积v
e0
以及计算得到的垂拱楔形体的体积v
sag
,计算出船舶的排水体积v
e
:
[0133]
v
e
=v
e0
+v
sag
(15)
[0134]
上述公式(15)中的v
e
即为船舶的排水体积的最终计算结果,依据阿基米德定理,将船舶的排水体积与船舶所在地的水密度和重力加速度相乘即获得船舶重量。
[0135]
本实施例的基于水位与角度同步测量的船舶计重系统能够对两个水位测量节点101、102和六个角度测量节点201、202、203、204、205、206实现同步测量,获取到船舶在同一姿态下的多个测量数据,并且在船体3d图纸的等距切片数据基础上将船舶排水体积分割为船艉吃水深度对应的切片截面以下累计体积、船体纵倾形成的纵倾楔形体、垂拱形成的垂拱楔形体分别计算合并结果,提高了测量和计算精度,能够真实反映船舶的实际重量。。
[0136]
实施例二
[0137]
如图9所示,为本实施例一种基于水位与角度同步测量的船舶计重方法的流程图。本实施例的基于水位与角度同步测量的船舶计重方法基于所述基于水位与角度同步测量的船舶计重系统实现,具体包括以下步骤:
[0138]
s1:建立船舶图纸尺寸数据库21。
[0139]
具体的,将船舶图纸尺寸数据预先存入所述船舶图纸尺寸数据库21。所述船舶图纸尺寸数据包括但不限于船舶夏季载重线所标记的最大吃水数据h
max
、各测量节点安装中心之间的间距在船舶中纵剖面上的投影距离lf,lm,la(其中:lf为前部角度测量节点201、
204与对应侧中部角度测量节点202、205安装中心之间的间距在船舶中纵剖面上的投影距离;lm为中部角度测量节点202、205与对应侧后部角度测量节点203、206安装中心之间的间距在船舶中纵剖面上的投影距离;la为后部角度测量节点203、206与对应侧水位测量节点101、102安装中心之间的间距在船舶中纵剖面上的投影距离),以及沿船舶高度方向上做平行于船底平面的等距切片而生成的切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
以及切片截面以下的船体累计体积v
h
所组成的数据表。
[0140]
s2:建立安装校正数据库22。
[0141]
具体的,将水位测量节点101、102和角度测量节点201、202、203、204、205、206在安装过程中产生的测量偏移值预先存入所述安装校正数据库中。所述测量偏移值包括水位测量偏移值和纵倾角测量偏移值。在本实施例中,所述水位测量偏移值为水位测量节点101、102安装后的测量零刻度面与船舶夏季载重线的垂直高度差δh;所述纵倾角测量偏移值为各角度测量节点201、202、203、204、205、206安装后的初始纵倾角度测量值与安装纵倾角度实际值的偏移差值。
[0142]
s3:同步采集模块中各测量节点的时钟。
[0143]
基于时钟同步模块23,根据用户的操作指令,使所述路由器3使用网络标准时间遵从ntp协议将所述计算服务器2与采集模块1进行时间同步,以使得各水位测量节点101、102和角度测量节点201、202、203、204、205、206能够采集船舶在同一姿态下的测量值。
[0144]
s4:数据采集。
[0145]
首先,基于所述采集模块1,根据采集指令模块24发送的数据采集指令,通过水位测量节点101、102和角度测量节点201、202、203、204、205、206实时采集和上报船舶水位高度测量值、纵倾角度测量值以及纵倾角角速度测量值。所述数据采集指令包括采集起始时间点t0、采集的数据数量n以及采集过程中相邻两个采集数据的采集时间点之间的固定间隔设定值δt(即第n
‑
1个数据的采集时间点t
n
‑1与第n数据采集时间点t
n
之间的时间间隔,且δt大于水位传感器1011和角度传感器2011的数据采集周期),则第n个数据对应的采集时间点t
n
为t0+n*δt。所述采集时间起始点t0可以是数据采集指令发出后的一个未来时间点,也可以是相对数据采集指令发出时间点起算的一个延迟时间段。
[0146]
所述数据整合单元251在进行数据处理时包括两个并行的执行线程,具体的其中第一执行线程为所述水位测量节点101、102中的第一网络控制板1012从t0开始连续读取水位传感器1011的水位高度测量值(为水位传感器1011的连续上报测量值的个数)暂存在所述第一网络控制板1012的寄存器中,角度测量节点201、202、203、204、205、206中的第二网络控制板2012从t0开始持续读取角度传感器2011纵倾角度测量值[y0,y1,...,y
t
](t为角度传感器2011的连续上报测量值的个数)和纵倾角角速度测量值[av0,av1,...,av
t
]暂存在所述第二网络控制板2012的寄存器中;其中网络控制板寄存器内以下一时刻读取到的水位高度测量值纵倾角度测量值y
t+1
和纵倾角角速度测量值av
t+1
覆盖刷新上一时刻对应的测量值。具体的其中第二执行线程由第一网络控制板1012从(t0+δt)开始,以δt为间隔周期,(δt大于水位传感器1011和角度传感器2011的数据采集周期),从寄存器中读取测量值数据,一共读取n次;由第二网络控制板2012从(t0+δt)开始,以δt为间隔周期从寄存器中读取测量值数据,一共读取n次;在所述第二执行线程中,所述第一
网络控制板1012和第二网络控制板2012从对应的寄存器中读取到水位传感器1011和角度传感器2011最接近同步读取时刻的测量值,即在采集时间点t1读取到的测量值集合为[h1,y3,av3],在采集时间点t2读取到的测量值集合为[h2,y6,av6],持续读取n次后得到所述实时动态测量数据表
[0147]
s5:测量数据预处理。
[0148]
首先,利用所述安装校正数据库22中的水位测量偏移值和纵倾角测量偏移值分别对所述水位测量节点101、102和角度测量节点201、202、203、204、205、206采集到的水位高度测量值和纵倾角度测量值进行偏移校正,得到对应的水位高度校正值和纵倾角度校正值。
[0149]
然后,以采集时间点为索引对水位高度校正值、纵倾角度校正值以及纵倾角角速度测量值进行关联重整得到实时动态测量数据表。
[0150]
接着,从实时动态测量数据表中提取一个完整纵倾运动周期内的水位高度校正值、纵倾角度校正值以及纵倾角角速度测量值,形成纵倾运动周期动态数据表。具体的,根据纵倾角度校正值随采集时间的变化规律,截取船舶在一个完整纵倾运动周期内的采集时间点而舍弃其他采集时间点,并以截取出的数据形成纵倾运动周期动态数据表。
[0151]
最后,根据所述纵倾运动周期动态数据表筛选或计算出船舶在期望平衡态时的平衡态水位高度值和平衡态纵倾角度值,形成期望平衡态测量数组。
[0152]
s6:计算船舶排水体积。
[0153]
根据所述期望平衡态测量数组以及船舶图纸尺寸数据,计算所述船舶的排水体积。
[0154]
具体的,首先,将船艉左舷侧水位测量节点101的平衡态水位高度值和船艉右舷侧水位测量节点102的平衡态水位高度值算术平均得到船舶横倾修正后的船艉水位高度,进而计算得到横倾修正后的船艉吃水深度。
[0155]
然后,以船艉吃水深度h做平行于船舶底面的水平切片截面,并以船艉吃水深度h为索引,在所述船舶图纸尺寸数据21中查询与船艉吃水深度h临近的两个等距切片高度h
n
,h
n+1
对应的切片截面的截面积、切片截面中船舶的艏艉最大长度和切片截面以下的船体累积体积,分别计算得到船舶在船艉吃水深度h位置处平行于船底平面的切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
和切片截面以下的船体累积体积v
h
。
[0156]
接着,根据船艉吃水深度h对应的切片截面的截面积s
h
、切片截面中船舶的艏艉最大长度l
h
计算得到所述纵倾楔形体的体积δv。
[0157]
最后,所述计算模块26再根据船艉吃水深度h位置处平行于船底平面的切片截面的截面积s
h
以及船舶前部、中部、后部的角度测量节点201、202、203、204、205、206的平衡态纵倾角度值和角度测量节点安装中心之间的间距在船舶中纵剖面上的投影距离l
f
和l
m
,计算所述船舶的垂拱楔形体的排水体积v
sag
,进而将船舶的排水体积v
sag
与船舶所在地的水密度和重力加速度相乘即获得船舶重量。
[0158]
本发明利用水位测量节点101、102和角度测量节点201、202、203、204、205、206同步测量获取到船舶在同一姿态下的多个测量数据,并且在船体3d图纸的等距切片数据基础上将船舶排水体积分割为船艉吃水深度对应的切片截面以下累计体积、船体纵倾形成的纵
倾楔形体、垂拱形成的纵倾楔形体分别计算合并结果,提高了测量和计算精度,能够真实反映船舶的实际重量。
[0159]
以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和本发明的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1