一种船舶机械运行模式的判定方法
1.本发明涉及船舶机械设备监控技术领域,具体而言,尤其涉及一种船舶机械运行模式的判定方法。
背景技术:
2.随着船舶智能化和无人化的发展,远程及岸基遥控船舶的机械将成为热点和难点。在不同的海况和航线规划条件下,船舶及其设备的运行模式也不同,在实施遥控操作前,感知和判别船舶机械设备的运行模式,才能实现对船舶机械的可靠操作。但目前没有船舶机械运行模式精准的判定方法,所以设计一种能精准判定船舶机械运行模式的方法尤为重要。
3.现有的解决方法有使用bp神经网络进行分类、使用未优化的支持向量机进行分类等。然而bp神经网络虽然泛化能力以及容错能力较强,但存在局部极小化、收敛速度慢、应用实例与网络规模的矛盾以及bp神经网络结构选择不一等问题。而未优化的支持向量机的预测准确率较低。
技术实现要素:
4.根据上述提出的技术问题,而提供一种船舶机械运行模式的判定方法。本发明首先需要从已有的船舶机械设备的每个运行状态中的参数里把训练集以及测试集提取出来,之后进行一定的预处理,之后用优化之后的支持向量机对其进行训练,使用最后得到的模型来预测测试集的分类标签,如果测试集的预测效果达到预期则用于实船,如果效果不理想则增加优化算法的迭代次数,直到效果达到预期。
5.本发明采用的技术手段如下:
6.一种船舶机械运行模式的判定方法,包括如下步骤:
7.s1、获取数据集,并提取出训练集和测试集;
8.s2、对数据集中的数据进行预处理;
9.s3、采用优化后的支持向量机对预处理后的训练集数据进行训练,得到训练模型;
10.s4、采用得到的训练模型来预测测试集的分类标签,如果测试集的预测效果达到预期则用于实船,如果效果不理想则增加优化算法的迭代次数,直到效果达到预期。
11.进一步地,所述步骤s1中,获取数据集,并提取出训练集和测试集,具体为:
12.获取已有的船舶机械设备的每个运行状态中的参数;
13.在所述参数中提取训练集以及测试集。
14.进一步地,所述步骤s2中,对数据集中的数据进行预处理,具体为:
15.对训练集和测试集进行归一化预处理,将数据映射到0~1范围之内处理;其中,采用的归一化映射如下:
16.17.上式中,y、x分别表示数据归一化前后的值,x
min
、x
max
分别表示数据集中的最小、最大值。
18.进一步地,所述步骤s3中,采用优化后的支持向量机对预处理后的训练集数据进行训练,得到训练模型,具体为:
19.s31、构建麻雀种群,如下:
[0020][0021]
其中,d表示待优化问题的维数,n表示麻雀种群的数量;
[0022]
s32、将所有麻雀种群的适应度函数表示成如下形式:
[0023][0024]
其中,f表示适应度值;
[0025]
s33、在每次迭代的过程中,根据步骤s31中构建的麻雀种群和步骤s32中所有麻雀种群的适应度函数,对发现者的位置进行更新,如下:
[0026][0027]
其中,t代表当前迭代数,j=1,2,3,
…
,d;iter
max
是一个常数,表示最大的迭代次数;x
i,j
表示第i个麻雀在第j维中的位置信息;a∈(0,1]是一个随机数;q表示服从正态分布的随机数;l表示一个1
×
d的矩阵,其中该矩阵内每个元素全部为1;r2∈[0,1]表示预警值;st∈[0.5,1]表示安全值;
[0028]
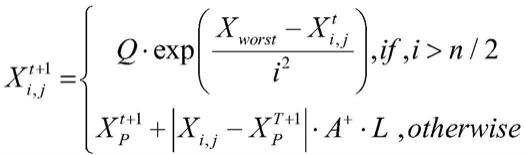
s34、对加入者的位置进行更新,如下:
[0029][0030]
其中,x
p
表示目前发现者所占据的最优位置;x
worst
表示当前全局最差的位置;a表示一个1
×
d的矩阵,其中每个元素随机赋值为1或-1,a
+
=a
t
(aa
t
)-1
,当i>n/2时,适应度值较低的第i个加入者没有获得食物,处于十分饥饿的状态,需要飞往其它地方觅食,以获得更多的能量;
[0031]
s35、对意识到危险的麻雀的位置进行更新,如下:
[0032][0033]
其中,x
best
表示当前的全局最优位置;β表示步长控制参数,是服从均值为0,方差为1的正态分布的随机数;k∈[-1,1]表示一个随机数;fi表示当前麻雀个体的适应度值;fg和fw分别表示当前全局最佳和最差的适应度值;ε表示一个避免分母为0的常数。
[0034]
进一步地,所述步骤s3中,优化后的支持向量机包括对支持向量机svm数据中惩罚参数和核函数参数利用麻雀搜索算法进行优化。
[0035]
进一步地,所述步骤s4中,采用适应度函数对测试集进行预测,适应度函数如下:
[0036]
fitness=max(accuracy[predict(test)])。
[0037]
进一步地,所述步骤s4之后还包括:
[0038]
s5、对预测的分类标签进行准确度计算。
[0039]
进一步地,所述步骤s5具体包括:
[0040]
s51、计算测试准确度,计算公式如下:
[0041]
测试准确度=正确预测个数/被预测正确的个数其中,被预测正确的个数=被模型预测为正的负样本+被模型预测为负的正样本;
[0042]
s52、计算预测召回率,计算公式如下:
[0043]
预测召回率=正确预测的个数/预测的总个数
[0044]
s53、计算综合评测度f1_score,计算公式如下:
[0045]
f1_score=2*测试准确度*预测的召回率/(测试准确度+预测的召回率)。
[0046]
较现有技术相比,本发明具有以下优点:
[0047]
1、在进行船舶机械操作之前,使用本发明方法对船上机械的运行模式进行判定,可以有效的判定船舶机械当前的运行模式,方便操作人员对机械设备进行操作,提高船舶机械设备管理效率,降低管理成本。
[0048]
2、本发明提供的船舶机械运行模式的判定方法,能够防止操作人员因对船舶机械当前运行模式的判断失误而对船舶机械造成误操作,延长了船舶机械的寿命。
[0049]
基于上述理由本发明可在船舶机械设备监控等领域广泛推广。
附图说明
[0050]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做以简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0051]
图1为本发明方法流程图。
[0052]
图2为本发明采用优化后的支持向量机对预处理后的训练集数据进行训练的训练流程图。
具体实施方式
[0053]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0054]
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0055]
如图1所示,本发明提供了一种船舶机械运行模式的判定方法,包括如下步骤:
[0056]
s1、获取数据集,并提取出训练集和测试集;
[0057]
具体实施时,作为本发明优选的实施方式,所述步骤s1中,获取数据集,并提取出训练集和测试集,具体为:
[0058]
获取已有的船舶机械设备的每个运行状态中的参数;
[0059]
在所述参数中提取训练集以及测试集。
[0060]
s2、对数据集中的数据进行预处理;
[0061]
具体实施时,作为本发明优选的实施方式,所述步骤s2中,对数据集中的数据进行预处理,具体为:
[0062]
对训练集和测试集进行归一化预处理,将数据映射到0~1范围之内处理;其中,采用的归一化映射如下:
[0063][0064]
上式中,y、x分别表示数据归一化前后的值,x
min
、x
max
分别表示数据集中的最小、最大值。
[0065]
s3、采用优化后的支持向量机对预处理后的训练集数据进行训练,得到训练模型;
[0066]
具体实施时,作为本发明优选的实施方式,如图2所示,所述步骤s3中,采用优化后的支持向量机对预处理后的训练集数据进行训练,得到训练模型,具体为:
[0067]
s31、构建麻雀种群,如下:
[0068][0069]
其中,d表示待优化问题的维数,n表示麻雀种群的数量;
[0070]
麻雀搜索算法的数学模型,主要规则如下所述:
[0071]
发现者通常拥有较高的能源储备并且在整个种群中负责搜索到具有丰富食物的区域,为所有的加入者提供觅食的区域和方向。在模型建立中能量储备的高低取决于麻雀个体所对应的适应度值(fitness value)的好坏。
[0072]
一旦麻雀发现了捕食者,个体开始发出鸣叫作为报警信号。当报警值大于安全值时,发现者会将加入者带到其它安全区域进行觅食。
[0073]
发现者和加入者的身份是动态变化的。只要能够寻找到更好的食物来源,每只麻雀都可以成为发现者,但是发现者和加入者所占整个种群数量的比重是不变的。也就是说,有一只麻雀变成发现者必然有另一只麻雀变成加入者。
[0074]
加入者的能量越低,它们在整个种群中所处的觅食位置就越差。一些饥肠辘辘的加入者更有可能飞往其它地方觅食,以获得更多的能量。
[0075]
在觅食过程中,加入者总是能够搜索到提供最好食物的发现者,然后从最好的食物中获取食物或者在该发现者周围觅食。与此同时,一些加入者为了增加自己的捕食率可能会不断地监控发现者进而去争夺食物资源。
[0076]
当意识到危险时,群体边缘的麻雀会迅速向安全区域移动,以获得更好的位置,位于种群中间的麻雀则会随机走动,以靠近其它麻雀。
[0077]
s32、将所有麻雀种群的适应度函数表示成如下形式:
[0078][0079]
其中,f表示适应度值;
[0080]
s33、在麻雀搜索算法中,具有较好适应度值的发现者在搜索过程中会优先获取食物。此外,因为发现者负责为整个麻雀种群寻找食物并为所有加入者提供觅食的方向。因此,发现者可以获得比加入者更大的觅食搜索范围。在每次迭代的过程中,根据步骤s31中构建的麻雀种群和步骤s32中所有麻雀种群的适应度函数,对发现者的位置进行更新,如下:
[0081][0082]
其中,t代表当前迭代数,j=1,2,3,
…
,d;iter
max
是一个常数,表示最大的迭代次数;x
i,j
表示第i个麻雀在第j维中的位置信息;a∈(0,1]是一个随机数;q表示服从正态分布的随机数;l表示一个1
×
d的矩阵,其中该矩阵内每个元素全部为1;r2∈[0,1]表示预警值;st∈[0.5,1]表示安全值;当r2<st时,表示此时的觅食环境周围没有捕食者,发现者可以执行广泛的搜索操作。如果r2≥st,表示种群中的一些麻雀已经发现了捕食者,并向种群中其它麻雀发出了警报,此时所有麻雀都需要迅速飞到其它安全的地方进行觅食。
[0083]
s34、对加入者的位置进行更新,如下:
[0084][0085]
其中,x
p
表示目前发现者所占据的最优位置;x
worst
表示当前全局最差的位置;a表示一个1
×
d的矩阵,其中每个元素随机赋值为1或-1,a
+
=a
t
(aa
t
)-1
,当i>n/2时,适应度值较低的第i个加入者没有获得食物,处于十分饥饿的状态,需要飞往其它地方觅食,以获得更多的能量;
[0086]
s35、对意识到危险的麻雀的位置进行更新,如下:
[0087][0088]
其中,x
best
表示当前的全局最优位置;β表示步长控制参数,是服从均值为0,方差为1的正态分布的随机数;k∈[-1,1]表示一个随机数;fi表示当前麻雀个体的适应度值;fg和fw分别表示当前全局最佳和最差的适应度值;ε表示一个避免分母为0的常数。
[0089]
在本实施例中,为简单起见,当fi>fg时,表示此时的麻雀正处于种群的边缘,极其容易受到捕食者的攻击。x
best
表示这个位置的麻雀是种群中最好的位置也是十分安全的。fi=fg时,表明处于种群中间的麻雀意识到了危险,需要靠近其它的麻雀以此尽量减少它们被捕食的风险。k表示麻雀移动的方向同时也是步长控制参数。
[0090]
具体实施时,作为本发明优选的实施方式,所述步骤s3中,优化后的支持向量机包括对支持向量机svm数据中惩罚参数和核函数参数利用麻雀搜索算法进行优化。
[0091]
s4、采用得到的训练模型来预测测试集的分类标签,如果测试集的预测效果达到预期则用于实船,如果效果不理想则增加优化算法的迭代次数,直到效果达到预期。
[0092]
具体实施时,作为本发明优选的实施方式,所述步骤s4中,采用适应度函数对测试集进行预测,适应度函数如下:
[0093]
fitness=max(accuracy[predict(test)])。
[0094]
具体实施时,作为本发明优选的实施方式,所述步骤s4之后还包括:
[0095]
s5、对预测的分类标签进行准确度计算。
[0096]
所述步骤s5具体包括:
[0097]
s51、计算测试准确度,计算公式如下:
[0098]
测试准确度=正确预测个数/被预测正确的个数
[0099]
其中,被预测正确的个数=被模型预测为正的负样本+被模型预测为负的正样本;
[0100]
s52、计算预测召回率,计算公式如下:
[0101]
预测召回率=正确预测的个数/预测的总个数
[0102]
s53、计算综合评测度f1_score,计算公式如下:
[0103]
f1_score=2*测试准确度*预测的召回率/(测试准确度+预测的召回率)。
[0104]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽
管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1