一种基于虚拟仿真的手机智能装配生产教学方法与流程
1.本发明涉及虚拟仿真教学技术领域,特别是一种基于虚拟仿真的手机智能装配生产教学方法。
背景技术:
2.传统教学方法为根据手机智能生产线开发出该生产线的缩略版教学仪器,实现再现现代工业自动化的运行场景,包括电气自动化技术、工业机器人技术和网络通讯技术等,进而在实训设备上进行教学。
3.但是,现有的传统教学仪器在教学实训中,由于学员对设备或技术的不熟练,可能会造成人身安全或设备安全事故,存在安全隐患;并且设备造价高,制作成本大;此外,设备会占用一定程度的场地,不仅仅是设备本身的体积,还必须考虑设备的展开,运行时的空间流畅,足够的观察空间以便教学;同时,设备运行时会消耗较多电能,造成能源的浪费。
技术实现要素:
4.为了克服现有技术的上述缺点,本发明提供一种基于虚拟仿真的手机智能装配生产教学方法。
5.本发明解决其技术问题所采用的技术方案是:一种基于虚拟仿真的手机智能装配生产教学方法,包括以下步骤:
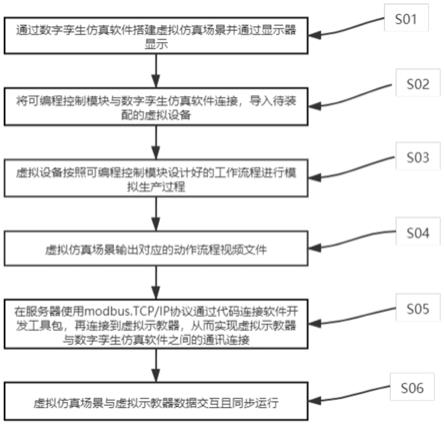
6.s01:通过数字孪生仿真软件搭建虚拟仿真场景并通过显示器显示;
7.s02:将可编程控制模块与数字孪生仿真软件连接,导入待装配的虚拟设备;
8.s03:虚拟设备按照可编程控制模块设计好的工作流程进行模拟生产过程;
9.s04:虚拟仿真场景输出对应的动作流程视频文件;
10.s05:在服务器使用modbus.tcp/ip协议通过代码连接软件开发工具包,再连接到虚拟示教器,从而实现虚拟示教器与数字孪生仿真软件之间的通讯连接;
11.s06:虚拟仿真场景与虚拟示教器数据交互且同步运行。
12.作为本发明的进一步改进:所述步骤s01还包括:所述虚拟仿真场景设有虚拟设备,所述虚拟设备包括四轴机器人按键上料单元、手机底盒上料单元、手机上盖出料单元、六轴机器人打磨装配单元和仓储单元。
13.作为本发明的进一步改进:所述步骤s03还包括:所述可编程控制模块对虚拟设备添加运动属性、传感器添加信号、检查途径和编写python脚本,从而对虚拟设备进行控制处理。
14.作为本发明的进一步改进:所述步骤s02还包括:通过在kep sever ex 6服务器使用modbus.tcp/ip协议连接可编程控制模块,实现可编程控制模块与数字孪生仿真软件的通讯连接。
15.作为本发明的进一步改进:所述步骤s02还包括:所述可编程控制模块包括plc和装有plc编程软件的软件客户端,所述可编程控制模块用于提供编程环境。
16.作为本发明的进一步改进:所述步骤s02还包括:把plc程序的变量写入kep sever ex 6服务器,数字孪生仿真软件读取kep sever ex 6服务器的变量,从而实现数字孪生仿真软件与可编程控制模块的通讯与数据交换,从而控制数字孪生仿真软件的虚拟设备进行一系列逻辑运动。
17.作为本发明的进一步改进:所述步骤s05还包括:把虚拟示教器的变量写入到kep sever ex 6服务器,数字孪生仿真软件通过kep sever ex 6服务器读取软件开发工具包的数据,软件开发工具包再读取到虚拟示教器的数据,从而完成数字孪生仿真软件与虚拟示教器的数据交换,从而控制数字孪生仿真软件的虚拟设备的运动,从而实现虚拟示教器的编程与调试的教学功能。
18.作为本发明的进一步改进:所述教学方法应用于手机智能装配生产线的虚拟仿真教学系统,所述系统包括:
19.虚拟仿真场景:用于放置虚拟设备;
20.虚拟设备:包括四轴机器人按键上料单元、按键出料单元、手机底盒上料单元、手机上盖出料单元、六轴机器人打磨装配单元、视觉系统和仓储单元;
21.可编程控制模块:包括plc和装有plc编程软件的软件客户端,用于提供用户编程环境。
22.作为本发明的进一步改进:所述按键出料单元用于将按键料盘输送到待装配工位;
23.所述手机底盒上料单元用于将手机底盒输送到待装配工位;
24.所述四轴机器人按键上料单元用于将按键装配到手机底盒上;
25.所述手机上盖出料单元用于将手机上盖输送到待装配工位;
26.所述六轴机器人打磨装配单元用于将手机上盖装配到手机底盒上,并将完成装配的手机在打磨机上进行打磨;
27.所述视觉系统用于对手机进行模拟检测,检测手机是否合格;
28.所述仓库单元用于储存手机。
29.与现有技术相比,本发明的有益效果是:
30.本发明可避免设备安全事故、保障学员在教学实训中的人身安全,具有节约成本、降低资源消耗的优点,同时极大解决场地问题,并且虚拟仿真不会出现真实设备中损坏的损失,学员可以大胆试验,对教学的效果有很大的提升。
附图说明
31.图1为本发明的流程示意图。
具体实施方式
32.在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,有关术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要
素。现结合结合附图说明与实施例对本发明进一步说明:
33.请参阅图1,一种基于虚拟仿真的手机智能装配生产教学方法,包括以下步骤:
34.s01:通过数字孪生仿真软件搭建虚拟仿真场景并通过显示器显示;
35.s02:将可编程控制模块与数字孪生仿真软件连接,导入待装配的虚拟设备;
36.s03:虚拟设备按照可编程控制模块设计好的工作流程进行模拟生产过程;
37.s04:虚拟仿真场景输出对应的动作流程视频文件;
38.s05:在服务器使用modbus.tcp/ip协议通过代码连接软件开发工具包,再连接到虚拟示教器,从而实现虚拟示教器与数字孪生仿真软件之间的通讯连接;
39.s06:虚拟仿真场景与虚拟示教器数据交互且同步运行。
40.所述步骤s01还包括:所述虚拟仿真场景设有虚拟设备,所述虚拟设备包括四轴机器人按键上料单元、手机底盒上料单元、手机上盖出料单元、六轴机器人打磨装配单元和仓储单元。
41.所述步骤s03还包括:所述可编程控制模块对虚拟设备添加运动属性、传感器添加信号、检查途径和编写python脚本,从而对虚拟设备进行控制处理;
42.所述步骤s02还包括:通过在kep sever ex 6服务器使用modbus.tcp/ip协议连接可编程控制模块,实现可编程控制模块与数字孪生仿真软件的通讯连接。
43.所述步骤s02还包括:所述可编程控制模块包括plc和装有plc编程软件的软件客户端,所述可编程控制模块用于提供编程环境。
44.所述步骤s02还包括:把plc程序的变量写入kep sever ex 6服务器,数字孪生仿真软件读取kep sever ex 6服务器的变量,从而实现数字孪生仿真软件与可编程控制模块的通讯与数据交换,从而控制数字孪生仿真软件的虚拟设备进行一系列逻辑运动。
45.本发明可以锻炼学员plc编程能力、对设备逻辑控制的理解和逻辑思维的开发。
46.所述步骤s05还包括:把虚拟示教器的变量写入到kep sever ex 6服务器,数字孪生仿真软件通过kep sever ex 6服务器读取软件开发工具包的数据,软件开发工具包再读取到虚拟示教器的数据,从而完成数字孪生仿真软件与虚拟示教器的数据交换,从而控制数字孪生仿真软件的虚拟设备的运动,从而实现虚拟示教器的编程与调试的教学功能。
47.本发明的虚拟教学实训系统模拟真实手机智能制造生产线的配置和工作流程,学员通过编写plc程序,输入真实plc,并通过plc与数字孪生仿真软件进行数据通信,驱动虚拟仿真场景中的虚拟设备按程序设计好的工作流程进行模拟生产过程。
48.本发明可根据不同生产线、加工设备或者教学仪器,进行数字孪生仿真的开发。在电脑中进行虚拟仿真,实时模拟出真实设备的运行情况,其中包括物料的运输,物料的组装,机器人的运行,产品的工艺处理,产品的打包和分类,合格产品的检查等。
49.本发明可避免设备安全事故、保障学员在教学实训中的人身安全,具有节约成本、降低资源消耗的优点,同时极大解决场地问题,并且虚拟仿真不会出现真实设备中损坏的损失,学员可以大胆试验,对教学的效果有很大的提升。
50.所述教学方法应用于手机智能装配生产线的虚拟仿真教学系统,所述系统包括:
51.虚拟仿真场景:用于放置虚拟设备;
52.虚拟设备:包括四轴机器人按键上料单元、按键出料单元、手机底盒上料单元、手机上盖出料单元、六轴机器人打磨装配单元、视觉系统和仓储单元;
53.可编程控制模块:包括plc和装有plc编程软件的软件客户端,用于提供用户编程环境。
54.所述按键出料单元用于将按键料盘输送到待装配工位;
55.所述手机底盒上料单元用于将手机底盒输送到待装配工位;
56.所述四轴机器人按键上料单元用于将按键装配到手机底盒上;
57.所述手机上盖出料单元用于将手机上盖输送到待装配工位;
58.所述六轴机器人打磨装配单元用于将手机上盖装配到手机底盒上,并将完成装配的手机在打磨机上进行打磨;
59.所述视觉系统用于对手机进行模拟检测,检测手机是否合格;
60.所述仓库单元用于储存手机。
61.所述虚拟设备的装配生产的步骤为:按键出料单元将按键料盘输送到待装配工位;手机底盒上料单元将手机底盒输送到待装配工位;四轴机器人按键上料单元将按键逐个装配到手机底盒上;输送带将手机底盒运送到手机上盖装配工位;手机上盖出料单元将手机上盖输送到待装配工位;六轴机器人打磨装配单元抓取快换夹具,并抓取手机上盖装配到手机底盒上;六轴机器人打磨装配单元利用夹具夹取手机到视觉系统进行模拟检测,检测手机是否合格;六轴机器人打磨装配单元利用夹具夹取手机在打磨机上进行打磨;六轴机器人打磨装配单元利用夹具夹取手机转送到仓库单元。
62.实施案例:
63.一种基于虚拟仿真的手机智能装配生产教学方法,包括以下步骤:
64.s01:通过数字孪生仿真软件搭建虚拟仿真场景并通过显示器显示;所述虚拟仿真场景设有虚拟设备,所述虚拟设备包括四轴机器人按键上料单元、手机底盒上料单元、手机上盖出料单元、六轴机器人打磨装配单元和仓储单元;
65.s02:将可编程控制模块与数字孪生仿真软件连接,导入待装配的虚拟设备,对其进行数字孪生仿真的技术处理;
66.s03:虚拟设备按照可编程控制模块设计好的工作流程进行模拟生产过程;所述可编程控制模块对虚拟设备添加运动属性、传感器添加信号、检查途径和编写python脚本,从而对虚拟设备进行控制处理;
67.s04:虚拟仿真场景输出对应的动作流程视频文件;
68.s05:在服务器使用modbus.tcp/ip协议通过代码连接软件开发工具包,再连接到虚拟示教器,从而实现虚拟示教器与数字孪生仿真软件之间的通讯连接;
69.s06:虚拟仿真场景与虚拟示教器数据交互且同步运行,从而实现虚拟示教器的调试和维护的教学功能。
70.所述步骤s02还包括:通过在kep sever ex 6服务器使用modbus.tcp/ip协议连接可编程控制模块,实现可编程控制模块与数字孪生仿真软件的通讯连接。
71.所述步骤s02还包括:所述可编程控制模块包括plc和装有plc编程软件的软件客户端,所述可编程控制模块用于提供编程环境。
72.所述步骤s02还包括:把plc程序的变量写入kep sever ex 6服务器,数字孪生仿真软件读取kep sever ex 6服务器的变量,从而实现数字孪生仿真软件与可编程控制模块的通讯与数据交换,从而控制数字孪生仿真软件的虚拟设备进行一系列逻辑运动。
73.所述步骤s05还包括:把虚拟示教器的变量写入到kep sever ex 6服务器,数字孪生仿真软件通过kep sever ex 6服务器读取软件开发工具包的数据,软件开发工具包再读取到虚拟示教器的数据,从而完成数字孪生仿真软件与虚拟示教器的数据交换,从而控制数字孪生仿真软件的虚拟设备的运动,从而实现虚拟示教器的编程与调试的教学功能。
74.实施案例二:
75.打开visualcomponentspremium数字孪生仿真软件,在界面上方的“开始”找到“导入——几何元”,出现一个pc文件的浏览界面,找到手机智能装配生产线的3d模型(*stp)。对模型进行分解,分解成足以合成组件即可。把分解好的模型块或者面合成并提取组件,其中包括按键出料单元、手机底盒上料单元、输送带单元、手机上盖出料单元、打磨单元、仓储单元和四轴机器人按键上料单元、六轴机器人打磨装配单元。
76.打开博途v14软件,建立一个新项目,选择plc-s7-1212dc/dc/dc,进行编程。
77.首先,按表1设置好变量。
[0078][0079]
表1
[0080]
然后根据具体要求编写程序,实现以下动作:
[0081]
按键出料单元将按键料盘输送到待装配工位;手机底盒上料单元将手机底盒输送到待装配工位;四轴机器人按键上料单元将按键逐个装配到手机底盒上;输送带将手机底盒运送到手机上盖装配工位;手机上盖出料单元将手机上盖输送到待装配工位;六轴机器人打磨装配单元抓取快换夹具,并抓取手机上盖装配到手机底盒上;六轴机器人打磨装配单元利用夹具夹取手机到视觉系统进行模拟检测,检测手机是否合格;六轴机器人打磨装
配单元利用夹具夹取手机在打磨单元上进行打磨;六轴机器人打磨装配单元利用夹具夹取手机转送到仓库单元。
[0082]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1