分散式位置确定系统和方法与流程
1.本公开涉及一种用于在制造环境中定位位置和/或目的地的系统和/或方法。
背景技术:
2.本部分中的陈述仅提供了与本公开相关的背景信息,并且可能不构成现有技术。
3.在制造环境中,利用自主系统来执行各种制造过程。为了有效地执行制造过程,自主系统利用来自全球导航卫星系统(gnss)传感器的位置数据来识别目的地、其全局位置坐标,以及在全局位置坐标与目的地之间的路径。然而,gnss传感器在制造环境中且更具体地是在室内制造环境中可能不准确。本公开解决了与gnss传感器相关联的这些问题以及其他问题。
技术实现要素:
4.本部分提供了对本公开的总体概述,而不是其全部范围或其所有特征的全面公开。
5.本公开提供了一种用于环境的制图系统,所述环境包括被配置为生成所述环境的图像数据的图像传感器。所述制图系统包括固定标签,所述固定标签包括位置标记,其中所述位置标记标识所述固定标签的预定义位置坐标。所述制图系统包括实体标签,所述实体标签包括实体标记,其中所述实体标记标识与所述实体标签相关联的实体。所述制图系统包括控制器,所述控制器被配置为基于所述图像数据来确定所述实体标签的位置坐标,其中所述图像数据包括所述位置标记和所述实体标记。
6.在一些形式中,所述固定标签设置在所述环境内的固定对象上。
7.在一些形式中,所述实体标签设置在与所述实体相关联的对象上,并且所述对象能够在所述环境内移动。
8.在一些形式中,所述控制器还被配置为基于所述图像数据来确定所述图像传感器与所述固定标签之间的第一基于图像的距离,并且所述控制器还被配置为基于所述图像数据来确定所述图像传感器与所述实体标签之间的第二基于图像的距离。在一些形式中,所述实体标签的所述位置坐标进一步基于所述第一基于图像的距离、所述第二基于图像的距离以及所述固定标签的所述预定义位置坐标。
9.在一些形式中,基于所述固定标签与所述固定标签的一个或多个参考几何形状的比较来确定所述第一基于图像的距离,并且所述一个或多个参考几何形状是所述固定标签的参考大小、所述固定标签的参考角度或它们的组合。
10.在一些形式中,基于所述实体标签与所述实体标签的一个或多个参考几何形状的比较来确定所述第二基于图像的距离,并且所述一个或多个参考几何形状是所述实体标签的参考大小、所述实体标签的参考角度或它们的组合。
11.在一些形式中,所述控制器还被配置为基于所述图像传感器的像素密度、所述图像传感器的焦距、所述图像传感器的高度、所述图像传感器的宽度、所述图像传感器的几何
形状或它们的组合来确定所述第一基于图像的距离和所述第二基于图像的距离。
12.在一些形式中,所述控制器还被配置为将所述实体标签的所述位置坐标广播到存储对应于所述实体标签的所述位置坐标的数据库,以标识所述环境内的所述实体的位置。
13.在一些形式中,所述制图系统还包括多个所述固定标签,其中所述多个固定标签中的每个固定标签标识唯一预定义位置坐标,并且其中所述多个固定标签分布在整个所述环境中。
14.在一些形式中,所述固定标签和所述实体标签是基准标记物。
15.在一些形式中,所述固定标签是apriltag,并且所述位置标记是二维条形码。
16.在一些形式中,所述控制器还被配置为对所述二维条形码进行解码以识别所述apriltag的所述预定义位置坐标。
17.在一些形式中,所述实体标签是apriltag,并且所述实体标记是二维条形码。
18.在一些形式中,所述图像传感器设置在所述环境内的固定对象和可移动对象中的一者上。
19.本公开还提供了一种用于对环境进行制图的制图方法,其中所述环境包括被配置为生成图像数据的图像传感器,并且其中所述图像数据包括所述环境的固定标签和实体标签。所述方法包括识别所述固定标签的位置标记,其中所述位置标记标识所述固定标签的预定义位置坐标。所述方法包括识别所述实体标签的实体标记,其中所述实体标记标识与所述实体标签相关联的实体。所述方法包括基于所述固定标签的所述预定义位置坐标和所述图像数据来确定所述实体标签的位置坐标。
20.在一些形式中,所述方法还包括基于所述图像数据来确定所述图像传感器与所述固定标签之间的第一基于图像的距离。在一些形式中,所述方法还包括基于所述图像数据来确定所述图像传感器与所述实体标签之间的第二基于图像的距离,其中所述实体标签的所述位置坐标进一步基于所述第一基于图像的距离、所述第二基于图像的距离以及所述固定标签的所述预定义位置坐标。
21.在一些形式中,基于所述固定标签与所述固定标签的一个或多个参考几何形状的比较来确定所述第一基于图像的距离,并且所述一个或多个参考几何形状是所述固定标签的参考大小、所述固定标签的参考角度或它们的组合。
22.在一些形式中,基于所述实体标签与所述实体标签的一个或多个参考几何形状的比较来确定所述第二基于图像的距离,并且所述一个或多个参考几何形状是所述实体标签的参考大小、所述实体标签的参考角度或它们的组合。
23.本公开还提供了一种用于对环境进行制图的制图方法,其中所述环境包括被配置为生成图像数据的图像传感器,并且其中所述图像数据包括所述环境的固定标签和实体标签。所述方法包括识别所述固定标签的位置标记,其中所述位置标记标识所述固定标签的预定义位置坐标。所述方法包括识别所述实体标签的实体标记,其中所述实体标记标识在所述环境中的实体。所述方法包括确定所述图像传感器与所述实体标签和所述固定标签中的至少一者之间的一个或多个基于图像的距离。所述方法包括基于所述一个或多个基于图像的距离和所述固定标签的所述预定义位置坐标来确定所述实体标签的位置坐标。
24.在一些形式中,所述一个或多个基于图像的距离包括所述图像传感器与所述固定标签之间的第一基于图像的距离,并且所述一个或多个基于图像的距离包括所述图像传感
器与所述实体标签之间的第二基于图像的距离。在一些形式中,所述实体标签的所述位置坐标进一步基于所述第一基于图像的距离和所述第二基于图像的距离。
25.根据本文中提供的描述,另外的适用领域将变得显而易见。应理解,描述和具体示例仅意图用于说明目的,并且不意图限制本公开的范围。
附图说明
26.为了可很好地理解本公开,现在将参考附图通过举例的方式描述本公开的各种形式,在附图中:
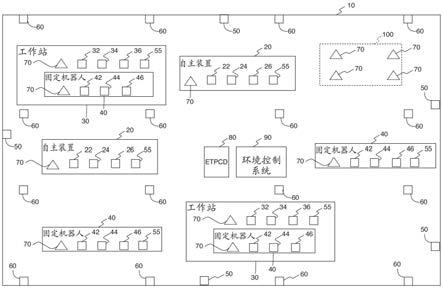
27.图1示出了根据本公开的教导的具有自主系统和环境控制系统的制造环境;
28.图2是根据本公开的教导的自主系统的功能框图;并且
29.图3示出了根据本公开的教导的示例控制例程。
30.本文中描述的附图仅用于说明目的,而不意图以任何方式限制本公开的范围。
具体实施方式
31.以下描述本质上仅仅是示例性的并且不意图限制本公开、应用或用途。应理解,贯穿附图,对应的附图标记指示相似或对应的零件和特征。
32.本公开提供了一种用于制造环境的制图系统,该制图系统包括各种实体(例如,移动机器人、移动工作站、固定系统/部件、制造环境中的位置等)。该制图系统基于标识预定义位置坐标的固定标签和标识实体的实体标签来动态地确定和更新环境的各种系统和部件的位置坐标。
33.作为示例,自主系统在制造环境内导航并且使用一个或多个机载图像传感器来检测固定标签和实体标签。自主系统的控制器分别基于固定标签和实体标签的标记来识别预定义位置坐标和与实体标签相关联的实体。控制器然后基于预定义位置坐标以及机载图像传感器、固定标签与实体标签之间的一个或多个基于图像的距离来确定实体的位置坐标。因此,动态地确定制造环境中的各种实体的位置坐标,并且可以分散的方式且在不使用gnss传感器的情况下更新所述位置坐标。此外,当新实体结合到制造环境中时,可通过在其上附加实体标签而不使用gnss传感器来动态地确定新实体的位置坐标。应容易理解,本公开的制图系统解决了其他问题,并且不应限于本文提供的示例。
34.参考图1,提供了用于制造部件(例如,车辆)的制造环境10。制造环境10通常包括自主装置20、工作站30、固定机器人40、基础设施传感器50、机载图像传感器55、固定标签60、实体标签70、实体标签位置坐标数据库(etpcd)80以及环境控制系统90。在下文中,基础设施传感器50和机载成像传感器55被统称为“成像传感器50和/或55”。尽管etpcd 80和环境控制系统90被示出为制造环境10的一部分,但是应理解,etpcd 80和/或环境控制系统90可以其他形式远离制造环境10定位。在一种形式中,自主装置20、工作站30、固定机器人40、etpcd 80和/或环境控制系统90使用无线通信协议(例如,型协议、蜂窝式协议、无线保真(wi-fi)型协议、近场通信(nfc)协议、超宽带(uwb)协议等)可通信地耦合。
35.在一种形式中,自主装置20是部分或完全自主的,并且被配置为如环境控制系统90所指示自主地移动到制造环境10的各个位置。作为示例,自主装置20包括但不限于移动机器人、无人机和/或自动化导引车辆以及其他自主装置。为了自主地移动自身,自主装置
20包括控制系统22以经由致动器24并基于一个或多个自主导航传感器26(例如,gnss传感器、本地位置传感器等)和来自成像传感器50和/或55的图像数据来控制自主装置20的各种移动系统(例如,推进系统、转向系统和/或制动系统)。
36.在一种形式中,工作站30包括用于在其上支撑和/或固定外部部件(例如,工件、固定机器人40等)和/或操作员的一个或多个元件。作为示例,工作站30包括用于支撑当工作站30在整个制造环境10自主地导航时对工件执行操作的操作员的平台。作为另一个示例,工作站30包括将工件和/或固定机器人40固定到工作站30的紧固机构。示例紧固机构包括但不限于磁性紧固组件、真空紧固组件、粘合剂紧固组件,或它们的组合。
37.在一种形式中,工作站30是部分或完全自主的,并且被配置为如环境控制系统90所指示自主地移动到制造环境10(例如,自动化导引车辆)的各个位置。为了自身自主地移动,工作站30包括控制系统32以经由致动器34并基于一个或多个自主导航传感器36(例如,gnss传感器、本地位置传感器等)和来自成像传感器50和/或55的图像数据来控制工作站30的各种移动系统(例如,推进系统、转向系统和/或制动系统)。应理解,工作站30可以其他形式固定在制造环境10内。
38.在一种形式中,固定机器人40(例如,工业机器人)被配置为对工件执行自动化操作。固定机器人40可被限制在制造环境10中的给定区域。作为示例,固定机器人40可设置在不具有围栏或用于限制固定机器人40的移动的其他类似封闭结构的无拘禁区域中。作为另一个示例,固定机器人40可设置在具有围栏或用于限制固定机器人40的移动的其他类似封闭结构的笼形区域中。此外,固定机器人40可包括控制系统42,该控制系统被配置为操作致动器44以控制附接到其上的一个或多个机器人连杆(例如,机器人臂)的运动,并且由此执行机器人任务数据库46中定义的一个或多个自动化操作。
39.在一种形式中,基础设施传感器50和机载成像传感器55是分别向自主装置20、工作站30和/或固定机器人40的控制系统22、32、42中的至少一者提供制造环境10的图像数据的成像传感器。更具体地,成像传感器50和/或55被配置为获得固定标签60和实体标签70的图像数据。在一种形式中,基础设施传感器50设置在制造环境10内的基础设施元件(诸如但不限于:塔、灯杆、建筑物、标志以及制造环境10的其他固定元件)上。在一种形式中,机载图像传感器55设置在自主装置20、工作站30和/或固定机器人40上。成像传感器50和/或55可包括但不限于:二维(2d)相机、三维(3d)相机、红外传感器、雷达扫描仪、激光扫描仪、光检测和测距(激光雷达)传感器、超声波传感器等等。如下面进一步详细地描述,控制系统22、32、42被配置为基于从成像传感器50和/或55获得的图像数据来确定检测到的实体标签70和/或相关联的实体的位置坐标。
40.在一种形式中,固定标签60包括唯一地标识制造环境10内的预定义位置坐标的位置标记(例如,图像和/或文本)。在一种形式中,固定标签60是唯一地标识预定义位置坐标的基准标记物。作为示例,固定标签60是各自包括唯一2d条形码的apriltag(即,具有4到12位的2d条形码)和/或快速响应(qr)标签,并且每个2d条形码与预定义位置坐标相关联。在一种形式中,固定标签60包括预定义位置坐标的文本。应理解,固定标签60可通过呈其他形式的各种其他基准标记物来实现,并且不限于本文描述的示例。
41.在一种形式中,固定标签60设置在制造环境10内的固定基础设施元件上,诸如但不限于:基础设施传感器50、塔、灯杆、建筑物、标志以及制造环境10的其他固定元件。当固
定标签60设置在固定基础设施元件上时,可在校准过程期间定义与固定标签60相关联的位置坐标。作为示例,固定标签60中的一者附接到制造环境10中的杆,并且操作员/计算系统在校准过程期间将固定标签60的位置坐标定义为杆的gnss坐标(或其他位置坐标)。可针对固定标签60中的每一者重复校准过程,使得将固定标签中的每一者分配到特定的一组定义的gnss坐标。
42.在一种形式中,实体标签70包括唯一地标识制造环境10内的实体的实体标记(例如,图像和/或文本)。如本文所使用,“实体”是指制造环境10内的对象(例如,自主装置20、工作站30、固定机器人40以及制造环境10中的其他对象)或位置(例如,区域100)。作为示例并且如图1所示,实体标签70设置在自主装置20、工作站30和机器人40中的每一者上以唯一地标识相应的系统。此外,多个实体标签70设置在区域100中以唯一地标识区域100和/或区域100的各个子区。
43.在一种形式中,实体标签70是唯一地标识实体的基准标记物。作为示例,实体标签70是各自包括唯一2d条形码的apriltag和/或qr标签,并且每个2d条形码与特定实体相关联。在另一个示例中,实体标签70是设置在实体处的徽标。应理解,实体标签70可通过呈其他形式的各种其他基准标记物来实现,并且不限于本文描述的示例。
44.参考图2,示出了动态制图系统105的框图,并且该动态制图系统可设置在自主装置20、工作站30和/或固定机器人40的控制系统22、32、42内和/或被设置为边缘计算装置(未示出)。在一些形式中,动态制图系统105包括标签识别模块110、实体标签标记数据库112、固定标签标记数据库114、基于图像的距离模块120、实体标签参考几何形状数据库122、固定标签参考几何形状数据库124、图像传感器特性数据库126、位置坐标模块130以及通知模块140。应容易理解,动态制图系统105的任一个部件可设置在相同的位置或分布在不同的位置,并且因此可通信地耦合。尽管实体标签标记数据库112、固定标签标记数据库114、实体标签参考几何形状数据库122、固定标签参考几何形状数据库124和/或图像传感器特性数据库126被示出为单独的数据库,但是应理解,这些数据库中的任一者都可与其他形式的另一个数据库选择性地组合。
45.在一种形式中,实体标签标记数据库112存储多个标记实体条目,其中每个标记实体条目标识实体标签70中的一者并且提供对应的实体标记和与实体标签70相关联的相应实体。在一种形式中,固定标签标记数据库114存储多个标记位置坐标条目,其中每个标记位置坐标条目提供固定标签60中的一者的固定标签标记和与固定标签标记相关联的位置坐标。
46.在一种形式中,标签识别模块110被配置为基于从图像传感器50和/或55获得的图像数据以及来自固定标签标记数据库114的标记位置坐标条目来识别固定标签60的位置标记。作为示例,标签识别模块110采用已知的数字图像辨识技术来处理来自图像传感器50和/或55的图像数据并确定固定标签60的位置标记。然后,标签识别模块110基于来自固定标签标记数据库114的对应标记位置坐标条目来确定固定标签的位置坐标。同样地,标签识别模块110被配置为基于从图像传感器50和/或55获得的实体标记和来自实体标签标记数据库112的对应标记实体条目来识别实体标签70和与实体标签70相关联的实体。
47.作为示例,图像传感器50和/或55获得固定标签60和实体标签70的图像数据,该实体标签可以是apriltag。标签识别模块110采用已知的数字图像辨识技术来对固定标签60
和实体标签70的2d条形码进行解码,并且分别确定固定标签60的位置标记和与实体标签70相关联的实体。
48.作为另一个示例,图像传感器50和/或55获得固定标签60(该固定标签可包括预定义位置坐标的文本)和实体标签70(该实体标签可以是apriltag)的图像数据。标签识别模块110采用已知的数字图像辨识技术来对固定标签60的预定义位置坐标的文本进行解码,并且对实体标签70的2d条形码和与实体标签70相关联的实体进行解码。
49.在一种形式中,实体标签参考几何形状数据库122存储多个几何形状实体标签条目,其中每个几何形状实体标签条目标识实体标签70中的一者并且提供与实体标签70相关联的一组相应的参考几何形状。在一种形式中,固定标签参考几何形状数据库124存储多个几何形状固定标签条目,其中每个几何形状固定标签条目提供与固定标签60相关联的一组相应的参考几何形状。在一些形式中,一个或多个参考几何形状可包括固定标签60或实体标签70的参考大小(例如,参考面积、参考宽度、参考长度等等)、固定标签60或实体标签70的参考角度(例如,沿着相对于给定的轴向平面的轴线的参考旋转角度)或它们的组合(例如,参考偏斜)。
50.在一种形式中,图像传感器特性数据库126包括指示图像传感器50和/或55的像素密度、焦距、高度、宽度和/或几何形状的信息。应理解,图像传感器特性数据库126可包括图像传感器50和/或55的其他特性,并且不限于本文描述的特性。
51.在一种形式中,基于图像的距离模块120被配置为确定所识别的固定标签60中的每一个和所识别的实体标签70中的每一者的基于图像的距离。作为示例,基于图像的距离模块120被配置为确定机载图像传感器55与所识别的固定标签60之间的第一基于图像的距离以及机载图像传感器55与所识别的实体标签70之间的第二基于图像的距离。在一些形式中,基于图像的距离模块120可基于如由图像传感器特性数据库126指示的机载图像传感器55和/或基础设施传感器50的特性来确定第一基于图像的距离和第二基于图像的距离。作为示例,基于图像的距离模块120可基于机载图像传感器55和/或基础设施传感器50的焦距来确定第一基于图像的距离和第二基于图像的距离。
52.在一种形式中,为了确定第一基于图像的距离,基于图像的距离模块120可将所识别的固定标签60与固定标签参考几何形状数据库124的相应的几何形状固定的标签条目进行比较。作为示例,为了确定第一基于图像的距离,基于图像的距离模块120可基于来自图像传感器50和/或55的图像数据来测量固定标签60的偏斜。基于图像的距离模块120可将固定标签60的测量的偏斜与固定标签60的如由固定标签参考几何形状数据库124中的对应条目所指示的参考偏斜进行比较。基于固定标签60的测量的偏斜与参考偏斜之间的差值以及图像传感器50和/或55的特性,基于图像的距离模块120确定机载传感器55与所识别的固定标签60之间的第一基于图像的距离(例如,33米)。
53.同样地,为了确定图像传感器50和/或55与所识别的实体标签70之间的第二基于图像的距离,基于图像的距离模块120可将所识别的实体标签70的偏斜与如由来自实体标签参考几何形状数据库122的相应几何形状实体标签条目所指示的参考偏斜进行比较(例如,7米)。在一些形式中,基于图像的距离模块120可将已知的偏移应用于实体标签70与图像传感器50和/或55之间的第二基于图像的距离,使得第二基于图像的距离表示对应实体的特定部件/位置(例如,具有设置在固定机器人40的另一个位置处的实体标签70的固定机
器人40的末端执行器)与图像传感器50和/或55之间的距离。
54.在一种形式中,位置坐标模块130被配置为基于所识别的固定标签60的位置坐标和/或基于图像的距离中的至少一者来确定所识别的实体标签70的位置坐标。作为示例,位置坐标模块130最初确定机载图像传感器55和/或设置有机载图像传感器55的自主装置20和工作站30中的一者的特定部件的位置坐标。位置坐标模块130基于固定标签60的预定义位置坐标(如由标签识别模块110确定)、第一基于图像的距离(例如,33米)以及已知的距离到位置坐标转换关系来确定机载图像传感器55的位置坐标。如果针对一个或多个所识别的固定标签60确定了多于一个基于图像的距离,则位置坐标模块130可执行三角测量例程以确定机载图像传感器55和/或自主装置20和工作站30中的一者的特定部件的位置坐标。随后,位置坐标模块130基于机载图像传感器55的确定的位置坐标、机载图像传感器55与实体标签70之间的第二基于图像的距离以及已知的距离到位置坐标转换关系来确定所识别的实体标签70的位置坐标。
55.在一种形式中,通知模块140向环境控制系统90广播所识别的实体标签70的位置坐标。因此,环境控制系统90更新etpcd 80中的对应动态位置条目,其中每个动态位置条目包括实体标签70和/或对应的实体的当前位置坐标。因此,动态地更新存储在etpcd 80中的每个实体标签70的位置坐标。
56.在一种形式中,环境控制系统90被配置为基于存储在etpcd 80中的动态位置条目来指示制造环境10中的自主装置20、工作站30和其他自主系统自主地行进。作为示例,环境控制系统90基于存储在etpcd 80中的动态位置条目来定义自主装置20和工作站30行进的路径。为了定义路径,环境控制系统90可执行已知的路径规划例程、操纵规划例程和/或轨迹规划例程。
57.在示例应用中并且参考图1至图2,自主装置20在制造环境10内自主地行进,并且使用机载图像传感器55来获得制造环境10的图像数据。图像数据包括固定标签60中的一者和设置在工作站30上的实体标签70的图像。控制系统22的标签识别模块110识别固定标签60的位置标记以确定对应的预定义位置坐标,并且识别实体标签70的实体标记以识别工作站30。控制系统22的基于图像的距离模块120确定固定标签60与机载图像传感器55之间以及实体标签70与机载图像传感器55之间的基于图像的距离。基于基于图像的距离和机载图像传感器55的特性,位置坐标模块130确定实体标签70和/或工作站30的位置。然后,控制系统22的通知模块140向环境控制系统90广播所确定的位置,该环境控制系统将实体标签70和/或工作站30的更新的位置坐标存储在etpcd 80中。
58.参考图3,示出了用于动态地更新实体标签70的位置坐标的例程300,并且该例程由动态制图系统105(即,自主装置20的控制系统22、工作站30的控制系统32或固定机器人40的控制系统42)执行。在304处,动态制图系统105从图像传感器50和/或55获得图像数据。在308处,动态制图系统105分别基于位置标记和实体标记来识别固定标签60和/或实体标签70。在312处,动态制图系统105确定固定标签60和/或实体标签70的基于图像的距离(即,第一基于图像的距离和第二基于图像的距离)。在316处,动态制图系统105基于基于图像的距离和固定标签60的位置标记来确定实体标签70的位置坐标。在320处,环境控制系统90基于实体标签70的所确定的位置坐标来更新etpcd 80,并且然后结束。
59.除非本文另有明确指示,否则指示机械/热性质、组成百分比、尺寸和/或公差或其
他特性的所有数值在描述本公开的范围时应理解为由词语“约”或“大约”修饰。出于各种原因,期望这种修饰,所述原因包括:工业实践;材料、制造和装配公差;以及测试能力。
60.如本文所使用,短语a、b和c中的至少一者应被解释为使用非排他性逻辑“或”表示逻辑(a或b或c),并且不应被解释为表示“a中的至少一者、b中的至少一者以及c中的至少一者”。
61.本公开的描述本质上仅是示例性的,并且因此不脱离本公开的实质的变型意图在本公开的范围内。不应将此类变型视为脱离本公开的精神和范围。
62.在附图中,如箭头所指示的箭头的方向通常展示了图示所感兴趣的信息流(诸如数据或指令)。例如,当元件a和元件b交换各种信息,但是从元件a传输到元件b的信息与图示相关时,箭头可从元件a指向元件b。该单向箭头并不暗示没有其他信息从元件b传输到元件a。此外,对于从元件a发送到元件b的信息,元件b可向元件a发送对信息的请求或接收确认。
63.在本技术中,术语“模块”、“控制系统”和/或“控制器”可指代以下项、是以下项的一部分或包括以下项:专用集成电路(asic);数字、模拟或混合模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;可组合的逻辑电路;现场可编程门阵列(fpga);执行代码的处理器电路(共享、专用或群组);存储由处理器电路执行的代码的存储器电路(共享、专用或群组);提供所描述的功能性的其他合适的硬件部件,诸如但不限于移动驱动器和系统、收发器、路由器、输入/输出接口硬件等;或者上述的一些或全部的组合,诸如在片上系统中。
64.术语存储器是术语计算机可读介质的子集。如本文所使用的术语计算机可读介质不涵盖通过介质(诸如在载波上)传播的暂时性电信号或电磁信号;因此,术语计算机可读介质可被认为是有形的和非暂时性的。非暂时性有形计算机可读介质的非限制性示例为非易失性存储器电路(诸如快闪存储器电路、可擦除可编程只读存储器电路或掩模只读电路)、易失性存储器电路(诸如静态随机存取存储器电路或动态随机存取存储器电路)、磁性存储介质(诸如模拟磁带或数字磁带或硬盘驱动器)以及光学存储介质(诸如cd、dvd或蓝光光盘)。
65.本技术中所描述的设备和方法可由专用计算机部分地或完全地实现,所述专用计算机是通过将通用计算机配置为执行计算机程序中体现的一种或多种特定功能来创建的。功能框、流程图组成部分和上述其他要素用作软件规范,所述软件规范可通过技术人员或程序员的常规工作来转译成计算机程序。
66.根据本发明,提供了一种用于对环境进行制图的制图方法,其中所述环境包括被配置为生成图像数据的图像传感器,并且其中所述图像数据包括所述环境的固定标签和实体标签,所述方法具有:识别所述固定标签的位置标记,其中所述位置标记标识所述固定标签的预定义位置坐标;识别所述实体标签的实体标记,其中所述实体标记标识在所述环境中的实体;确定所述图像传感器与所述实体标签和所述固定标签中的至少一者之间的一个或多个基于图像的距离;以及基于所述一个或多个基于图像的距离和所述固定标签的所述预定义位置坐标来确定所述实体标签的位置坐标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1