用于设计直齿锥齿轮的齿根过渡曲线的方法与流程
1.本发明涉及机械设计加工领域,具体涉及一种用于设计直齿锥齿轮的齿根过渡曲线的方法。
背景技术:
2.目前,直齿锥齿轮的强度分析需依靠三维软件直接建立直齿锥齿轮的三维模型,然后在有限元软件中进行分析,很多锥齿轮加工也需要依靠三维模型,因此直齿锥齿轮的三维模型建立对设计分析、加工存在重要意义。
3.现有技术中对直齿锥齿轮的齿面修型、宏观优化有很多的研究,但极少有对齿根过渡曲线进行研究。建立三维模型时对齿根的建模没有明确的说明,即齿根过渡曲线的形状没有考虑,难以控制其设计边界。
4.而齿根过渡曲线的形状对齿轮的强度存在较大影响,因此需要根据设计条件对齿根过渡曲线进行优化设计,以便设计加工出符合使用要求的直齿锥齿轮。
技术实现要素:
5.本发明的目的是针对现有技术对应的不足,提供一种用于设计直齿锥齿轮的齿根过渡曲线的方法,将三维空间中的曲线转化到二维平面内设计,设计完成后再转化到三维空间中,可以实现满足条件的齿根最大圆角设计,且实现齿面到过渡圆弧之间平滑衔接,避免出现极点。
6.本发明的目的是采用下述方案实现的:一种用于设计直齿锥齿轮的齿根过渡曲线的方法,包括以下步骤:
7.1)以直齿锥齿轮的节锥顶点为原点建立三维坐标系,所述三维坐标系的x轴为直齿锥齿轮的中心轴,y轴、z轴均为直齿锥齿轮横截面的对称轴;
8.2)将一已知参数的背锥与直齿锥齿轮的横截面相交,设背锥与直齿锥齿轮面锥的交点为a(xa,ya,za),背锥与直齿锥齿轮根锥的交点为c(xc,yc,zc),背锥与x轴的交点为o0(x0,0,0),齿根过渡曲线起点为b(xb,yb,zb),背锥在点b(xb,yb,zb)的齿面公切线方向向量为点o0(x0,0,0)、点b(xb,yb,zb)构成的方向向量为设直线为齿面曲线ab在xz平面的投影,直线为齿根过渡曲线bc在xz平面的投影;
9.3)将背锥展开,形成扇形平面,以点o0(x0,0,0)为原点建立二维坐标系,所述二维坐标系以背锥与直齿锥齿轮的相交曲线旋转投影到xz平面内形成的直线为纵轴,设二维坐标系的横轴为l轴,纵轴为v轴,设二维坐标系的v轴与三维坐标系的x轴在二维坐标系中的夹角为δy;
10.设直齿锥齿轮的根锥与背锥的交点在背锥展开面所在的圆为圆o
oc
;
11.设三维坐标系的点b(xb,yb,zb)在二维坐标系中的对应点为点b1(l
b1
,v
b1
),三维坐标系的点c(xc,yc,zc)在二维坐标系中的对应点为点c1(l
c1
,v
c1
);
12.所述v轴为背锥与xz平面在二维坐标系中的交线,即背锥与直齿锥齿轮的相交曲
线旋转投影到xz平面内形成的直线与背锥与xz平面在二维坐标系中的交线重合;
13.4)按照下列方法计算与之间的夹角θ
cb
:
14.①
设点b(xb,yb,zb)与xz平面在二维坐标系中的夹角为θy,采用下列公式计算θy:
[0015][0016]
式中,yb为点b(xb,yb,zb)在y轴上的坐标,zb为点b(xb,yb,zb)在z轴上的坐标;
[0017]
②
设齿根过渡曲线起点背锥的法向量为采用下列公式计算齿根过渡曲线起点背锥的法向量
[0018][0019]
式中,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角;
[0020]
③
计算背锥在点b(xb,yb,zb)齿面的公切线方向向量
[0021][0022]
式中,为点b(xb,yb,zb)的法向量,为齿根过渡曲线起点背锥的法向量;
[0023]
④
采用下列公式计算点o0(x0,0,0)与点b(xb,yb,cb)构成的方向向量
[0024][0025]
式中,xb为点b(xb,yb,zb)在x轴上的坐标,yb为点b(xb,yb,zb)在y轴上的坐标,zb为点b(xb,yb,zb)在z轴上的坐标,xo为点o0(x0,0,0)在x轴上的坐标;
[0026]
⑤
采用下列公式计算与之间的夹角θ
cb
:
[0027][0028]
式中,为点o0(x0,0,0)与点b(xb,yb,cb)构成的方向向量,为背锥在点b(xb,yb,zb)齿面的公切线方向向量;
[0029]
5)求解在二维坐标系o
0-lv中齿面曲线ab的切线、齿根圆切线及齿根过渡曲线方程:
[0030]
①
在二维坐标系中,点b(xb,yb,zb)与齿面曲线相切的切线方程lb如下所示:
[0031]
vb=tanθ
lb
·
(l
b-l
b1
)+v
b1
[0032][0033]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三
维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,vb为切线lb上任一一点的纵坐标,lb为切线lb上任一一点的横坐标,l
b1
为点b1(l
b1
,v
b1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标;
[0034]
②
在二维坐标系中,过点c1(l
c1
,v
c1
)且与圆o
oc
相切的切线方程lc如下所示:
[0035]
vc=tanθ
vc
·
(l
c-l
c1
)+v
c1
[0036][0037][0038]
式中,vc为切线lc上任一一点的纵坐标,lc为切线lc上任一一点的横坐标,xc为点c(xc,yc,zc)在x轴的坐标,x0为点o0(x0,0,0)在x轴的坐标,zc为c(xc,yc,zc)在z轴的坐标,z0为点o0(x0,0,0)在z轴的坐标,r
oc
为圆o
oc
的半径,yc为点c(xc,yc,zc)在y轴的坐标,π为圆周率,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标;
[0039]
③
设切线lb与切线lc的交点为点d1(l
d1
,v
d1
),联立两切线方程求解出点d1(l
d1
,v
d1
);
[0040]
④
在二维坐标系中根据最大圆角原则进行齿根过渡曲线设计,其圆角半径:
[0041][0042][0043]
式中,r
ow
为齿根过渡曲线的圆角半径,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标,l
b1
为点b1(l
b1
,v
b1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0044]
设圆弧与切线lb相切的切点为圆弧起点wb(l
wb
,v
wb
),所述圆弧起点wb(l
wb
,v
wb
)的坐标计算方法如下所示:
[0045][0046][0047]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,l
b1
为点b1(l
b1
,v
b1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标,l
wb
为圆弧起点wb(l
wb
,v
wb
)的横坐标,v
wb
为圆弧起点wb(l
wb
,v
wb
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0048]
联立两式可得两组解,取满足v
wb
>v
d1
的这组解为圆弧起点wb(l
wb
,v
wb
)的坐标;
[0049]
设圆弧与切线lc相切的切点为圆弧终点wc(l
wc
,v
wc
),所述圆弧终点wc(l
wc
,v
wc
)的坐
标计算方法如下所示:
[0050][0051]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标,l
wc
为圆弧终点wc(l
wc
,v
wc
)的横坐标,v
wc
为圆弧终点wc(l
wc
,v
wc
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0052]
联立两式可得两组解,取满足v
wc
>v
c1
的这组解为圆弧终点wc(l
wc
,v
wc
)的坐标;
[0053]
最终设计的齿根过渡曲线由b1(l
b1
,v
b1
)点与圆弧起点wb(l
wb
,v
wb
)确立的直线段、、以及圆弧终点wc(l
wc
,v
wc
)与c1(l
c1
,v
c1
)确立的直线段组成;
[0054]
所述圆弧的圆弧半径为r
ow
、圆弧起点为wb(l
wb
,v
wb
)、圆弧终点为wc(l
wc
,v
wc
);
[0055]
6)由背锥展开面中的齿根过渡曲线起点b1(l
b1
,v
b1
)、齿根过渡曲线终点c1(l
c1
,v
c1
)、齿面曲线切线方程lb及齿根圆的切线方程lc,根据最大圆角原则设计齿根过渡曲线,并按照下列方法计算出齿根过渡曲线上的n个点的坐标:
[0056]
将二维坐标系中齿根过渡曲线上的n个点转化到三维坐标系中,转化时满足锥面特性,设二维坐标系中任意点为点m1(l
m1
,v
m1
),所述点m1(l
m1
,v
m1
)在三维坐标系中的坐标如下列公式所示:
[0057][0058][0059]
7)将二维坐标系中齿根过渡曲线上的n个点的坐标转化n个点在三维坐标系中的坐标后,拟合出三维坐标系中直齿锥齿轮的齿根过渡曲线,完成齿根过渡曲线的最终设计;
[0060]
8)根据计算得出齿根过渡区域所有点的三维坐标,然后用三维软件建立最终设计的齿根过渡曲线的三维模型。
[0061]
优选地,根据锥面展开特性,三维坐标系中任意点t(x
t
,y
t
,z
t
)在背锥展开面对应点t1(l
t1
,v
t1
)坐标转换关系如下列公式所示:
[0062][0063]
式中,δy为背锥线与x轴的夹角,θy为点t(x
t
,y
t
,z
t
)与xz平面的夹角。
[0064]
本发明的优点如下:
[0065]
1.通过建立背锥与整个直齿锥齿轮相交,将一个复杂的三维曲面进行离散化处理,对各种不同的锥齿轮均可适用;
[0066]
2.本发明三维中的曲面设计转化到二维平面中进行设计,降低了设计难度;
[0067]
3.针对现有的直齿锥齿轮设计技术不足,解决直齿锥齿轮齿根过渡曲面设计空白,在给定的设计边界下,可设计出最大齿根圆角,提升齿轮弯曲强度。
[0068]
4.本发明可直接将计算结果导入三维建模软件,实现三维建模以及模拟加工。
附图说明
[0069]
图1为本发明的流程图;
[0070]
图2为本发明三维空间中用背锥与直齿锥齿轮相交的示意图;
[0071]
图3为本发明背锥曲面在xz平面内的旋转投影;
[0072]
图4为本发明背锥曲面展开后在二维坐标系中的示意图;
[0073]
图5为本发明实施例中三维软件的齿根过渡区域图形。
具体实施方式
[0074]
如图1至图5所示,一种用于设计直齿锥齿轮的齿根过渡曲线的方法,包括以下步骤:
[0075]
1)以直齿锥齿轮的节锥顶点为原点建立三维坐标系,所述三维坐标系的x轴为直齿锥齿轮的中心轴,y轴、z轴均为直齿锥齿轮横截面的对称轴;
[0076]
2)将一已知参数的背锥与直齿锥齿轮的横截面相交,设背锥与直齿锥齿轮面锥的交点为a(xa,ya,za),背锥与直齿锥齿轮根锥的交点为c(xc,yc,zc),背锥与x轴的交点为o0(x0,0,0),齿根过渡曲线起点为b(xb,yb,zb),背锥在点b(xb,yb,zb)的齿面公切线方向向量为点o0(x0,0,0)、点b(xb,yb,zb)构成的方向向量为设直线为齿面曲线ab在xz平面的投影,直线为齿根过渡曲线bc在xz平面的投影;
[0077]
3)将背锥展开,形成扇形平面,以点o0(x0,0,0)为原点建立二维坐标系,所述二维坐标系以背锥与直齿锥齿轮的相交曲线旋转投影到xz平面内形成的直线为纵轴,设二维坐标系的横轴为l轴,纵轴为v轴,设二维坐标系的v轴与三维坐标系的x轴在二维坐标系中的夹角为δy;
[0078]
设直齿锥齿轮的根锥与背锥的交点在背锥展开面所在的圆为圆o
oc
;
[0079]
本实施例中,根据锥面展开特性,三维坐标系中任意点t(x
t
,y
t
,z
t
)在背锥展开面对应点t1(l
t1
,v
t1
)坐标转换关系如下列公式所示:
[0080][0081]
式中,δy为背锥线与x轴的夹角,θy为点t(x
t
,y
t
,z
t
)与xz平面的夹角。
[0082]
可得三维坐标系的点b(xb,yb,zb)在二维坐标系中的对应点为点b1(l
b1
,v
b1
),三维坐标系的点c(xc,yc,zc)在二维坐标系中的对应点为点c1(l
c1
,v
c1
);
[0083]
所述v轴为背锥与xz平面在二维坐标系中的交线,即背锥与直齿锥齿轮的相交曲线旋转投影到xz平面内形成的直线与背锥与xz平面在二维坐标系中的交线重合;
[0084]
4)按照下列方法计算与之间的夹角θ
cb
:
[0085]
①
设点b(xb,yb,zb)与xz平面在二维坐标系中的夹角为θy,采用下列公式计算θy:
[0086][0087]
式中,yb为点b(xb,yb,zb)在y轴上的坐标,zb为点b(xb,yb,zb)在z轴上的坐标;
[0088]
②
设齿根过渡曲线起点背锥的法向量为采用下列公式计算齿根过渡曲线起点背锥的法向量
[0089][0090]
式中,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角;
[0091]
③
计算背锥在点b(xb,yb,zb)齿面的公切线方向向量
[0092][0093]
式中,为点b(xb,yb,zb)的法向量,为齿根过渡曲线起点背锥的法向量;
[0094]
④
采用下列公式计算点o0(x0,0,0)与点b(xb,yb,cb)构成的方向向量
[0095][0096]
式中,xb为点b(xb,yb,zb)在x轴上的坐标,yb为点b(xb,yb,zb)在y轴上的坐标,zb为点b(xb,yb,zb)在z轴上的坐标,xo为点o0(x0,0,0)在x轴上的坐标;
[0097]
⑤
采用下列公式计算与之间的夹角θ
cb
:
[0098][0099]
式中,为点o0(x0,0,0)与点b(xb,yb,cb)构成的方向向量,为背锥在点b(xb,yb,zb)齿面的公切线方向向量;
[0100]
5)求解在二维坐标系o
0-lv中齿面曲线ab的切线、齿根圆切线及齿根过渡曲线方程:
[0101]
①
在二维坐标系中,点b(xb,yb,zb)与齿面曲线相切的切线方程lb如下所示:
[0102]
vb=tanθ
lb
·
(l
b-l
b1
)+v
b1
[0103][0104]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,vb为切线lb上任一一点的纵坐标,lb为切线lb上任一一点的横坐标,l
b1
为点b1(l
b1
,v
b1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标;
[0105]
②
在二维坐标系中,过点c1(l
c1
,v
c1
)且与圆o
oc
相切的切线方程lc如下所示:
[0106]
vc=tanθ
vc
·
(l
c-l
c1
)+v
c1
[0107][0108][0109]
式中,vc为切线lc上任一一点的纵坐标,lc为切线lc上任一一点的横坐标,xc为点c(xc,yc,zc)在x轴的坐标,x0为点o0(x0,0,0)在x轴的坐标,zc为c(xc,yc,zc)在z轴的坐标,z0为点o0(x0,0,0)在z轴的坐标,r
oc
为圆o
oc
的半径,yc为点c(xc,yc,zc)在y轴的坐标,π为圆周率,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标;
[0110]
③
设切线lb与切线lc的交点为点d1(l
d1
,v
d1
),联立两切线方程求解出点d1(l
d1
,v
d1
);
[0111]
④
在二维坐标系中根据最大圆角原则进行齿根过渡曲线设计,其圆角半径:
[0112][0113][0114]
式中,r
ow
为齿根过渡曲线的圆角半径,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标,l
b1
为点b1(l
b1
,v
b1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0115]
设圆弧与切线lb相切的切点为圆弧起点wb(l
wb
,v
wb
),所述圆弧起点wb(l
wb
,v
wb
)的坐标计算方法如下所示:
[0116][0117][0118]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,l
b1
为点b1(l
b1
,vb1
)的横坐标,v
b1
为点b1(l
b1
,v
b1
)的纵坐标,l
wb
为圆弧起点wb(l
wb
,v
wb
)的横坐标,v
wb
为圆弧起点wb(l
wb
,v
wb
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0119]
联立两式可得两组解,取满足v
wb
>v
d1
的这组解为圆弧起点wb(l
wb
,v
wb
)的坐标;
[0120]
设圆弧与切线lc相切的切点为圆弧终点wc(l
wc
,v
wc
),所述圆弧终点wc(l
wc
,v
wc
)的坐标计算方法如下所示:
[0121][0122]
式中,θ
cb
为三维坐标系中向量与之间的夹角,δy为二维坐标系的v轴与三维坐标系x轴在二维坐标系中的夹角,θy为点b(xb,yb,zb)与xz平面的夹角,l
c1
为点c1(l
c1
,v
c1
)的横坐标,v
c1
为点c1(l
c1
,v
c1
)的纵坐标,l
wc
为圆弧终点wc(l
wc
,v
wc
)的横坐标,v
wc
为圆弧终点wc(l
wc
,v
wc
)的纵坐标,l
d1
为点d1(l
d1
,v
d1
)的横坐标,v
d1
为点d1(l
d1
,v
d1
)的纵坐标;
[0123]
联立两式可得两组解,取满足v
wc
>v
c1
的这组解为圆弧终点wc(l
wc
,v
wc
)的坐标;
[0124]
最终设计的齿根过渡曲线由b1(l
b1
,v
b1
)点与圆弧起点wb(l
wb
,v
wb
)确立的直线段、、以及圆弧终点wc(l
wc
,v
wc
)与c1(l
c1
,v
c1
)确立的直线段组成;
[0125]
所述圆弧的圆弧半径为r
ow
、圆弧起点为wb(l
wb
,v
wb
)、圆弧终点为wc(l
wc
,v
wc
);
[0126]
6)由背锥展开面中的齿根过渡曲线起点b1(l
b1
,v
b1
)、齿根过渡曲线终点c1(l
c1
,v
c1
)、齿面曲线切线方程lb及齿根圆的切线方程lc,根据最大圆角原则设计齿根过渡曲线,并按照下列方法计算出齿根过渡曲线上的n个点的坐标:
[0127]
将二维坐标系中齿根过渡曲线上的n个点转化到三维坐标系中,转化时满足锥面特性,设二维坐标系中任意点为点m1(l
m1
,v
m1
),所述点m1(l
m1
,v
m1
)在三维坐标系中的坐标如下列公式所示:
[0128][0129][0130]
7)将二维坐标系中齿根过渡曲线上的n个点的坐标转化n个点在三维坐标系中的坐标后,拟合出三维坐标系中直齿锥齿轮的齿根过渡曲线,完成齿根过渡曲线的最终设计;
[0131]
8)根据计算得出齿根过渡区域所有点的三维坐标,然后用三维软件建立最终设计的齿根过渡曲线的三维模型。
[0132]
按照上述步骤作实施例:
[0133]
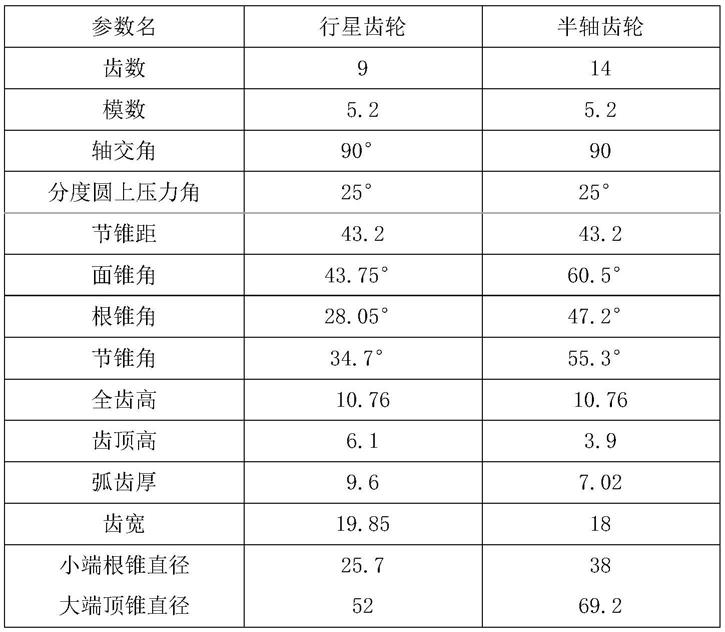
本实施例中,以汽车差速器的半轴齿轮为例,该汽车差速器的半轴齿轮及行星齿轮的宏观参数及设计边界如下表所示:
[0134][0135]
设计行星齿轮的齿根过渡区域时,根据半轴齿轮参数结合申请号为cn202010447264.7的专利《一种直齿锥齿轮齿面参数的计算方法》,求得半轴齿轮齿顶的三维坐标及对应的空间向量,再由空间啮合原理可得出行星齿轮的齿根过渡起点坐标及法向量如下表所示:
[0136]
序号xyznxnynz118.8000-2.461813.3933-0.2115-0.91490.3437220.4934-2.861913.5173-0.2155-0.96890.1215322.2944-3.179113.7293-0.1421-0.98980.0016424.1156-3.427014.4537-0.1029-0.9927-0.0637525.9107-3.680315.5012-0.0998-0.9926-0.0688627.7170-3.935016.5561-0.0972-0.9926-0.0732729.5347-4.191217.6181-0.0948-0.9925-0.0772831.3639-4.449118.6875-0.0927-0.9924-0.0807933.2051-4.708619.7644-0.0909-0.9923-0.08371034.6200-4.932421.6010-0.1580-0.98700.02841134.7098-4.316325.3940-0.2717-0.92360.2706
[0137]
根据计算得出齿根过渡区域所有点的三维坐标,然后用ug建模软件建立最终设计的齿根过渡曲线的三维模型。
[0138]
以上所述仅为本发明的优选实施例,并不用于限制本发明,本领域的技术人员在不脱离本发明的精神的前提下,对本发明进行的改动均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1