一种基于Alphashape算法的形变区边界自动提取方法与流程
一种基于alphashape算法的形变区边界自动提取方法
技术领域
1.本发明涉及地质灾害防治技术领域,尤其是涉及一种基于alphashape算法的形变区边界自动提取方法。
背景技术:
2.地表形变监测早期主要以水准测量为主,通过布设水准点获取整体区域的地表形变情况,这种方法虽然精度较高,但是工作量较大,效率较低且人工成本较高,近年来,随着合成孔径雷达干涉测量技术(insar)的发展,使得大面积、高精度的地表形变监测成为了可能。
3.insar技术是一门根据复雷达图像的相位数据来提取地面目标三维空间信息的技术,其基本思想是:利用两副天线同时成像或一副天线相隔一定时间重复成像,获取同一区域的复雷达图像对,由于两副天线与地面某一目标之间的距离不等,使得在复雷达图像对同名象点之间产生相位差,形成干涉纹图,干涉纹图中的相位值即为两次成像的相位差测量值,根据两次成像相位差与地面目标的三维空间位置之间存在的几何关系,利用飞行轨道的参数,即可测定地面目标的三维坐标。
4.上述中的现有技术方案存在以下缺陷:通过insar技术获取的地表形变信息通常包含在大量的测量点(ps点)中,在小范围区域内可以基于形变速率的分级显示进行人工解译获取形变区边界,然而该方法在大面积的地表形变时序监测中存在效率较低、受人主观因素影响、精度难以保证等问题。
技术实现要素:
5.本发明的目的是提供一种能够快速、自动获取形变区边界的基于alphashape算法的形变区边界自动提取方法。
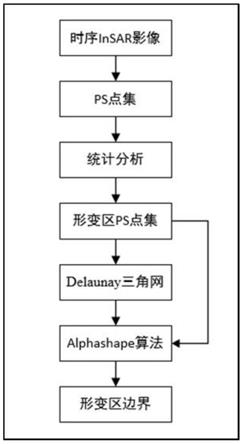
6.为实现上述目的,本发明提供了如下技术方案:一种基于alphashape算法的形变区边界自动提取方法,其步骤如下:s1:挑选目标区的时间序列sar影像,生成ps点集;s2:形变区ps点筛选:对步骤s1中得到的ps点进行统计分析,筛选出形变速率异常的点,标记为点集s,所述s所在区域为形变区;s3:针对步骤s2中筛选出的点集s,构建delaunay三角网;s4:形变区边界提取:在delaunay三角网的基础上,采用alphashape算法进行形变区边界线提取。
7.通过采用上述技术方案,使用alphashape算法对整体提取的点集进行计算,从而方便整体获得显著形变区域情况,增加了整体的提取速度,且增加了整体的提取精度。
8.进一步地,所述s2具体步骤为根据s1中得到的ps点进行统计分析,计算形变速率的均值 与标准差σ,并根据统计学规律选出形变速率满足条件的ps点,标记为点集s,s所在区域为地表下沉速率异常的区域。
9.通过采用上述技术方案,地表下沉速率异常的区域s标记后方便整体代入公式进行计算,从而方便整体根据情况计算出显著形变区域情况,保证整体良好的计算效果和计算精度。
10.进一步地,所述均值的计算公式为:所述标准差σ的计算公式为:式中为第个ps点的形变速率。
11.通过采用上述技术方案,通过将整体所得的数据代入公式进行计算,方便整体对不同的数值进行快速计算,保证整体良好的计算速度和计算效率,增加了整体的提取效果。
12.进一步地,所述s4具体步骤为:a1:针对步骤s3中构建的delaunay三角网,提取每条边构建边集q;a2:计算点集s的平均点间距,标记为,作为alphashape算法的参数;a3:新建边集t,用于存放形变区边界线;a4:从边集q中任选一条边l进行判断:当边长大于时,边l不易作为边界线,因为根据alphashape原理,边长大于时,构成l的两个点中至少有一个属于离散点;a5:当l边长小于时,计算过l的端点、且半径为的圆心坐标;a6:在s点集中除去、后,计算剩余点分别到、的距离,若所有点到或者的距离均大于,则表明l为点集s的边界线,将线段l加入集合t,若剩余点到或者的距离不全都大于,则表明l不是点集s的边界线;a7:对q中所有边都执行步骤a1-a6的操作,t中的边集构成形变区边界;a8:将t中边集转为面,得到形变区面状数据。
13.通过采用上述技术方案,使用超声导波换能器的晶片对整体进行探测,保证整体良好的探测定位效果,从而保证整体良好的定位扫描效果,增加了整体的填补效果。
14.进一步地,所述平均点间距的计算公式为:所述圆心、的坐标计算公式为:
其中:。
15.通过采用上述技术方案,快速地在in sar大数据中提取显著形变区域自动提取形变区边界,从而保证整体快速的提取效果,并保证整体的高精度提取效果。
16.综上所述,本发明的有益技术效果为:1、采用了alphashape算法对形变区边界进行计算,能够高效、快速地在in sar大数据中提取显著形变区域,自动提取形变区边界,在一定程度上避免了人工提取形变区时存在的效率较低、受人主观因素影响、精度难以保证等问题,实现自动提取形变边界的效果;2、采用了delaunay三角网进行点集筛选,以便于整体通过alphashape算法进行计算,能够高效、快速地在in sar大数据中提取显著形变区域,确定形变区域的边界范围,实现方便计算的效果。
附图说明
17.图1为本发明工作流程示意图;图2为本发明alphashape识别边界线原理示意图。
具体实施方式
18.以下结合附图对本发明作进一步详细说明。
19.参照图1,一种基于alphashape算法的形变区边界自动提取方法,其步骤如下:s1:挑选目标区的时间序列sar影像,生成ps点集。
20.s2:形变区ps点筛选:对步骤s1中得到的ps点进行统计分析,筛选出形变速率异常的点,标记为点集s,s所在区域为形变区。
21.步骤s1中生成的ps点带有该点的平均形变速率信息,对所有ps点的形变速率进行统计分析,计算形变速率的均值与标准差σ,并根据统计学规律选出形变速率满足条件的ps点,标记为点集s,s所在区域为地表下沉速率异常的区域。其中均值和标准差σ的计算公式如下所示:
式中为第个ps点的形变速率。
22.s3:针对步骤s2中筛选出的点集s,构建delaunay三角网。
23.s4:形变区边界提取:在delaunay三角网的基础上,采用alphashape算法进行形变区边界线提取。
24.首先计算点集s的平均点间距,标记为,作为alphashape算法的参数,同时针对步骤s3中构建的delaunay三角网,提取每条边构建边集q。
25.从边集q中任选一条边l进行判断:当边长大于时,边l不易作为边界线,因为根据alphashape原理,边长大于时,构成l的两个点中至少有一个属于离散点;当l边长小于时,计算过l的端点、且半径为的圆心坐标,。经过、两点且半径为的圆有两个,其圆心、的坐标计算公式为:的坐标计算公式为:的坐标计算公式为:的坐标计算公式为:其中:在s点集中除去、后,计算剩余点分别到、的距离,若所有点到或者的距离均大于,则表明l为点集s的边界线。若剩余点到或者的距离不全都大于,则表明l不是点集s的边界线。
26.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1