一种自动捕捉人脸的人脸测温终端的制作方法
1.本发明涉及人脸识别技术领域,具体涉及一种自动捕捉人脸的人脸测温终端。
背景技术:
2.随着全球化的不断发展,科技的不断进步,以及生物抗药性的增加和生物进化机制,出现“超级病毒”而引发全球规模的传染性疾病成为可能,例如2019年末的covid-19(新冠肺炎),市场上对分辨疾病的需求急速增加,而好的方式就是测量体温,但传统的测温设备额温枪只有单一的测温功能,并且需要大量的人力去进行拦截测温,其中接触也增加传染可能。
3.现有的解决办法是:采用传统的额温枪进行近距离接触拦截测温,但是,除了功能单一外,需要耗费大量的社会人力资源,而且存在消极测温和不规范测温的人员操作,增加测量体温的成本并增加了传染可能。
技术实现要素:
4.针对现有技术所存在的上述缺点,本发明提供了一种自动捕捉人脸的人脸测温终端,能够有效地解决目前额温枪或其他测温设备功能单一、需要耗费人力、增加疾病感染几率或存在消极测温等问题。
5.为了实现上述目的,本发明采用了如下技术方案:一种自动捕捉人脸的人脸测温终端,包括门框、设置在门框上的闸门和设置在门框上的摄像机;
6.所述门框入口端的地面处设有负压组件;
7.所述门框上设有用于驱动闸门运动的第一驱动组件;
8.所述门框上还设有用于驱动摄像机运动的第二驱动组件,所述摄像机的拍摄端设有高清摄像模块、红外摄像模块和激光测距模块,所述摄像机的内部嵌入式的设有cpu、gpu、存储模块和无线模块;
9.所述第一驱动组件、第二驱动组件和摄像机均由计算机控制。
10.更进一步地,所述门框的两端均设置有防护栏。
11.更进一步地,所述门框与地面垂直的杆体内端均设有闸门;所述第一驱动组件包括设置在门框上的铰座以及设置在铰座上的旋转电磁阀,所述旋转电磁阀的输出轴与安装铰座上的闸门固定连接,并且所述旋转电磁阀输出轴的中轴线垂直地面;所述闸门上端在垂直方向上的高度由计算机控制;
12.所述门框入口端的地面开设有凹槽;
13.所述负压组件包括安装在凹槽上端槽口处的栅格板、安装在凹槽下端槽口处的罩壳、安装在罩壳内部的空气倍增管、设置在罩壳上的出风管以及设置在出风管末端的负压泵。
14.更进一步地,所述闸门呈l型,并且所述闸门上并列式地设有一个电动伸缩杆和一组导向伸缩杆,所述电动伸缩杆和导向伸缩杆的顶端均固定在板面与闸门板面平行的挡板
上;
15.所述空气倍增管的吸风口、出风口分别处于垂直方向上的上端、下端,所述空气倍增管通过进气管与罩壳外的离心式空气压缩机的输出端连接,所述负压泵的输出端还设有单向管,所述单向管的末端设有过滤装置。
16.更进一步地,所述电动伸缩杆处于完全收缩状态下,所述挡板上端距离地面的高度在[0.7m,1.2m]的范围内,所述电动伸缩杆处于完全伸展状态下,所述挡板上端距离地面的高度在(1.2m,1.6m]的范围内;
[0017]
所述单向管内部设有特斯拉单向阀结构,所述过滤装置内部设有活性炭滤芯。
[0018]
更进一步地,所述第二驱动组件包括垂直方向驱动组件、水平方向驱动组件和角度俯仰驱动组件;
[0019]
所述垂直方向驱动组件包括设置在门框出口端两侧的轨道板、滑接在轨道板上的第一滑块、转动连接在轨道板上且与第一滑块螺接的螺杆、设置在轨道板端部且驱动螺杆自旋的伺服电机;
[0020]
所述水平方向驱动组件包括架设在两个第一滑块之间的导轨、滑接在导轨上的第二滑块和设置在第二滑块上的步进电机,并且安装在所述步进电机输出轴上的齿轮与导轨上的齿条啮合;
[0021]
所述角度俯仰驱动组件包括设置在第二滑块下端的转动座以及设置转动座上并驱动摄像机旋转的旋转电机,并且所述旋转电机输出轴的中轴线与导轨的行程方向平行。
[0022]
更进一步地,所述cpu中设有人脸检测模块、人脸识别模块、体温检测模块、ui模块、室温自动校准模块、测距算法和补偿算法;
[0023]
所述gpu中配置有人脸检测算法、人脸识别算法、活体检测算法和饰物识别算法;
[0024]
所述存储模块包括缓存单元和内存单元。
[0025]
更进一步地,所述门框的顶端还设有辅助监控,所述辅助监控的拍摄视角朝向门框的入口侧一端;所述门框的入口侧一端的顶部还设有显示屏,所述辅助监控和显示屏均由计算机控制;所述计算机上还信号连接有显示器。
[0026]
更进一步地,所述计算机通过专门的安全信道与云端服务器连接。
[0027]
更进一步地,所述门框入口端一侧的地面上还划设有与辅助监控配合的标识线。
[0028]
与现有技术相比,本发明的优点和积极效果在于:
[0029]
本发明通过增加门框和防护栏,门框设有用于调节闸门高度的第一驱动组件,门框的顶端还设有辅助监控和显示屏,门框上还设有用于调节摄像机空间位置和拍摄角度的第二驱动组件,摄像机的拍摄端设有高清摄像模块、红外摄像模块和激光测距模块,摄像机的内部嵌入式的设有cpu、gpu、存储模块和无线模块,cpu中设有人脸检测模块、人脸识别模块、体温检测模块、ui模块、室温自动校准模块、测距算法和补偿算法,gpu中配置有人脸检测算法、人脸识别算法、活体检测算法和饰物识别算法。
[0030]
这样计算机可以通过辅助监控对通行人员进行初步的检测(检测项目包括但不限于:是否有并列通行人员、活体检测、待通行人员的身高、待通行人员是否处于标识线内等等);然后计算机通过电动伸缩杆使得闸门上的挡板移动至指定的高度(挡板上端的高度低于待通行人员的肩部,这样可以保证摄像机能够完整拍摄待通行人员的面部),同时计算机指令第二驱动电机使得摄像机的拍摄端正对待通行人员的面部;然后通过摄像机上的红外
摄像模块对待通行人员进行额温测量(在此过程中,计算机通过激光测距模块测量红外摄像模块与待通行人员额头间的直线距离,再将测得距离带入补偿算法,从而对红外摄像模块测得温度数值进行补偿修正),若测得体温正常,则计算机指令闸门旋开,若测得体温异常,则计算机指令闸门继续保持关闭,同时计算机指令显示屏和显示器报警;当待通行人员正常通过时,就算计立即指令闸门关闭,同时电动伸缩杆和第二驱动组件复位。
[0031]
从而达到精准测温、降低人力成本、降低感染几率以及避免出现消极测温的效果。
附图说明
[0032]
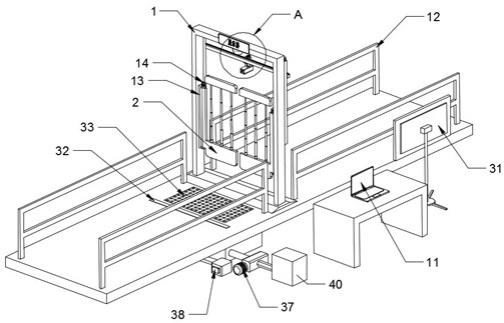
图1为本发明第一视角下的直观图;
[0033]
图2为本发明第二视角下门框、闸门和摄像机的爆炸视图;
[0034]
图3为本发明第三视角下第二驱动组件和摄像机的爆炸视图;
[0035]
图4为图1中a区域的放大图;
[0036]
图5为本发明中cpu和gpu内部模块关系图;
[0037]
图6为本发明第四视角下负压组件的爆炸视图;
[0038]
图7为本发明中过滤装置的剖视截面图;
[0039]
图8为本发明中空气倍增管的剖视截面图;
[0040]
图9为本发明中单向管的剖视截面图;
[0041]
图中的标号分别代表:1-门框;2-闸门;3-摄像机;4-高清摄像模块;5-红外摄像模块;6-激光测距模块;7-cpu;8-gpu;9-存储模块;10-无线模块;11-计算机;12-防护栏;13-铰座;14-旋转电磁阀;15-电动伸缩杆;16-导向伸缩杆;17-挡板;18-轨道板;19-第一滑块;20-螺杆;21-伺服电机;22-导轨;23-第二滑块;24-步进电机;25-齿轮;26-齿条;27-转动座;28-旋转电机;29-辅助监控;30-显示屏;31-显示器;32-标识线;33-栅格板;34-罩壳;35-空气倍增管;36-出风管;37-负压泵;38-离心式空气压缩机;39-单向管;40-过滤装置;41-活性炭滤芯。
具体实施方式
[0042]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
[0043]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开说明书的具体实施例的限制。
[0044]
本实施例的一种自动捕捉人脸的人脸测温终端,参照图1-9:包括门框1、设置在门框1上的闸门2和设置在门框1上的摄像机3。
[0045]
第一驱动组件、第二驱动组件和摄像机3均由计算机11控制,在本实施例中,计算机11采用手提式笔记本电脑,因为手提式笔记本电脑相较于台式电脑的具有明显的便携性优点。
[0046]
计算机11通过专门的安全信道与云端服务器连接,这样可以有效地保证计算机11与的云端服务器之间的通信信息不被窃取和泄露。
[0047]
(一)
[0048]
门框1上设有用于驱动闸门2运动的第一驱动组件。
[0049]
(一-一)
[0050]
门框1与地面垂直的杆体内端均设有闸门2;第一驱动组件包括设置在门框1上的铰座13以及设置在铰座13上的旋转电磁阀14,旋转电磁阀14的输出轴与安装铰座13上的闸门2固定连接,并且旋转电磁阀14输出轴的中轴线垂直地面,即门框1上的两个闸门2构成的摆闸,并且闸门2旋开时的方向朝向门框1出口一端。
[0051]
值得注意的是,门框1上的两个旋转电磁阀14的工作状态保持同步,即两个闸门2的状态始终保持相同。
[0052]
(一-二)
[0053]
门框1的两端均设置有防护栏12,这样可以有效地规范人员在通行时的秩序(即让通行的人员有序的排队通过),同时严格的排队秩序也能提升旅客的出行安全(因为避免了旅客拥挤而发生踩踏事故)。
[0054]
(一-三)
[0055]
闸门2上端在垂直方向上的高度由计算机11控制;这样的设计可以让计算机11根据带通行人员的身高而调整闸门2的高度,从而在不降低闸门2阻拦性能的同时方便摄像机3拍摄待通行人员的面部。
[0056]
其中,闸门2高度可调的实现方式具体为:闸门2呈l型,并且闸门2上并列式地设有一个电动伸缩杆15和一组导向伸缩杆16,电动伸缩杆15和导向伸缩杆16的顶端均固定在板面与闸门2板面平行的挡板17上;在本实施例中,每个闸门2上导向伸缩杆16的数量为两个,且电动伸缩杆15处于两个导向伸缩杆16的中间。
[0057]
电动伸缩杆15处于完全收缩状态下,挡板17上端距离地面的高度在[0.7m,1.2m]的范围内,这是因为具备独立行走能力且具备足够认知能力小孩的年龄通常在6岁左右,而根据卫生部《中国7岁以下儿童生长发育参照标准》查表可得,6岁孩子的身高在1m~1.3m左右,因此为了保证6岁孩童的面部能够完全漏出(这里的漏出是指摄像机3正对孩童面部时,挡板17不能有任何遮挡),就需要在1m~1.3m的基础上在减去孩童头顶至和脖子的长度(通常取0.3m);在本实施例中的,电动伸缩杆15完全收缩时挡板17上端距离地面的高度为0.7m。
[0058]
电动伸缩杆15处于完全伸展状态下,挡板17上端距离地面的高度在(1.2m,1.6m]的范围内,因为正常成人的身高普遍在1.6m~2m左右,如果挡板17的升高高度太低就会造成高个子旅客跨越闸门2;在本实施例中的,电动伸缩杆15完全伸展时挡板17上端距离地面的高度为1.6m。
[0059]
(二)
[0060]
门框1上还设有用于驱动摄像机3运动的第二驱动组件,摄像机3的拍摄端设有高清摄像模块4、红外摄像模块5和激光测距模块6,摄像机3的内部嵌入式的设有cpu7、gpu8、存储模块9和无线模块10。
[0061]
其中,高清摄像模块4用于拍摄旅客的面貌从而方便对旅客的面貌特征进行捕捉和分析。
[0062]
其中,红外摄像模块5用于测量旅客的体温,值得注意的是,红外摄像模块5发射出
的红外线在旅客身体上的光斑位于旅客的额头部位。
[0063]
其中,激光测距模块6用于精确测量红外摄像模块5与旅客额头之间的直线距离;在本实施例,为了激光测距模块6发射出的激光不会对旅客的身体造成损害,激光测距模块6所发出激光的波长范围在8μm~14μm。
[0064]
(二-一)
[0065]
第二驱动组件包括垂直方向驱动组件、水平方向驱动组件和角度俯仰驱动组件。
[0066]
垂直方向驱动组件包括设置在门框1出口端两侧的轨道板18、滑接在轨道板18上的第一滑块19、转动连接在轨道板18上且与第一滑块19螺接的螺杆20、设置在轨道板18端部且驱动螺杆20自旋的伺服电机21。这样可以通过垂直方向驱动组件调整摄像机3在垂直方向上的高度,从而使得摄像机3与待通行人员额头在垂直方向上的高度相同。值得注意的是,垂直方向驱动组件中的两个伺服电机21的工作状态保持同步。
[0067]
水平方向驱动组件包括架设在两个第一滑块19之间的导轨22、滑接在导轨22上的第二滑块23和设置在第二滑块23上的步进电机24,并且安装在步进电机24输出轴上的齿轮25与导轨22上的齿条26啮合。这样可以通过水平方向驱动组件调整摄像机3在水平方向上的位置,从而使得摄像机3与待通行人员额头处于同一水平方向上(这里的所说的水平方向平行与门框1的通行方向)。
[0068]
角度俯仰驱动组件包括设置在第二滑块23下端的转动座27以及设置转动座27上并驱动摄像机3旋转的旋转电机28,并且旋转电机28输出轴的中轴线与导轨22的行程方向平行。因为有些旅客的身高可能超出垂直方向驱动组件的行程,所以就需要角度俯仰驱动组件来调整摄像机3的俯仰角度,从而使得摄像机3的拍摄端对准待通行人员的额头。
[0069]
综上所述,第二驱动组件的功能在于让摄像机3的拍摄端对准待通行人员的额头。
[0070]
(二-二)
[0071]
cpu7中设有人脸检测模块(用于检测高清摄像模块4的拍摄视野内是否有人脸)、人脸识别模块(用于对高清摄像模块4拍摄到的人脸进行识别并判断其是否为真人,同时识别拍摄到的人脸的身份)、体温检测模块(用于对红外摄像模块5拍摄的数据进行计算,从而获得旅客的额温)、ui模块(用于在计算机11上显示的人机交互界面,从而方便测温人员的操作和查看)、室温自动校准模块(用于摄像机3启动时自动将红外摄像模块5校准至的室温,从而保证测量出的体温与实际体温之间的差值在误差允许范围内)、测距算法(用于对激光测距模块6的数据进行处理,从而获得摄像机3与旅客额头之间的直线距离)和补偿算法(用于配合测距算法和体温检测模块,从而对测温结果进行补偿修正,从而使得最终的测温结果与旅客实际体温一致)。
[0072]
其中,补偿算法是通过多次测量目标的实际温度值与通过红外光测量目标的初始温度值来建立初始温度值与补偿温度值之间的关系,从而给出修正补偿公式。补偿算法属于现有技术,其可以参考中国专利文献cn106017690中的算法模型。
[0073]
gpu8中配置有人脸检测算法、人脸识别算法、活体检测算法和饰物识别算法(检测旅客面部是否有口罩等的遮挡物,若有,则计算机11通过显示屏30发出提示,从而让旅客摘下口罩)。
[0074]
值得注意的是:
[0075]ⅰ.人脸检测算法:
[0076]
目前基于深度学习的人脸检测算法大致分为三类:
[0077]
第一种是基于级联的人脸检测算法(如cascade cnn、mtcnn),虽然其具备运行速度较快以及检测性能适中的优点,但是其只能适用于算力有限、背景简单且人脸数量较少的场景。
[0078]
第二种是基于两阶段的人脸检测算法,其一般基于faster-rcnn框架,在第一阶段生成候选区域,然后在第二阶段对候选区域进行分类和回归代表方法有face r-cnn、scaleface和fdnet,虽然其具备检测准确率较高的优点,但是其仍具有检测速度较慢这一突出缺点。
[0079]
第三种是基于单阶段的人脸检测算法,其主要基于anchor的分类和回归,通常会在经典框架(如ssd、retinanet)的基础上进行优化,其检测速度较两阶段法快,检测性能较级联法优,是一种检测性能和速度平衡的算法。
[0080]
综上所述,在本实施例中人脸检测算法采用基于上述第三种方法retinaface。
[0081]ⅱ.人脸识别算法:
[0082]
目前有三大人脸识别的经典算法:
[0083]
第一种是特征脸法(eigenface),具体步骤是首先把一批人脸图像转换成一个特征向量集,称为“eigenfaces”,即“特征脸”,它们是最初训练图像集的基本组件。识别的过程是把一副新的图像投影到特征脸子空间,并通过它的投影点在子空间的位置以及投影线的长度来进行判定和识别。将图像变换到另一个空间后,同一个类别的图像会聚到一起,不同类别的图像会聚力比较远,在原像素空间中不同类别的图像在分布上很难用简单的线或者面切分,变换到另一个空间,就可以很好的把他们分开了。eigenfaces选择的空间变换方法是pca(主成分分析),利用pca得到人脸分布的主要成分,具体实现是对训练集中所有人脸图像的协方差矩阵进行本征值分解,得到对应的本征向量,这些本征向量就是“特征脸”。每个特征向量或者特征脸相当于捕捉或者描述人脸之间的一种变化或者特性。这就意味着每个人脸都可以表示为这些特征脸的线性组合。
[0084]
第二种是局部二值模式(local binary patterns,lbp),这是一种计算机视觉领域里用于分类的视觉算子,lbp一种用来描述图像纹理特征的算子,其核心思想就是以中心像素的灰度值作为阈值,与他的邻域相比较得到相对应的二进制码来表示局部纹理特征。lbp是提取局部特征作为判别依据的。lbp方法显著的优点是对光照不敏感,但是依然没有解决姿态和表情的问题。不过相比于特征脸方法,lbp的识别率已经有了很大的提升。
[0085]
第三种是fisherface算法,fisher线性判别分析(linear discriminant analysis,lda):两类的线性判别问题可以看做所有的样本投影到一个方向(或者说是一个维度空间中),然后再这个空间中确定一个分类的阈值。过这个阈值点且与投影方向垂直的超平面就是分类面。判别思路是选择投影方向,使得投影后两类相隔尽可能远,类内又尽可能聚集(类间方差最大,类内方差最小)。
[0086]
其定义公式如下:
[0087][0088]
j(w)代表不同分类投影中心的距离,其数值越大越好。
[0089]
这个公式称为散列值(scatter matrixs),代表同一个分类投影后的散列值,也就是投影点的聚合度,它的值越小代表投影点越聚合。
[0090]
结合上面两个公式,第一个公式做分子且第二个公式做分母可得
[0091]
其中j(w)的值越大,则w的降维性能越好,具体过程包括确定最优的投影方向以及在这个方向上确定分类阈值。
[0092]
fisherfaces方法的具体过程如下:pca降维(对原始样本进行pca处理,获取pca处理之后的新样本)和lda特征提取(对降维后的样本使用fisher线性判别方法,确定一个最优的投影方向,构造一个一维的特征空间(这就被称为fisherfaces),将多维的人脸图像投影到fisherfaces特征空间,利用类内样本数据形成一组特征向量,这组特征向量就代表了人脸的特征)。
[0093]
综上所述,在本实施例中采用上述第三种的fisherface算法,因为其结合了pca和lda的优点。
[0094]ⅲ.活体检测算法:
[0095]
活体检测技术一般分为两类:
[0096]
第一种是配合式活体检测(最常见的活体检测方式)。具体方式为:通过眨眼、张嘴、摇头、点头、甚至读出随机数字等配合式组合动作,使用人脸关键点定位和人脸追踪等技术,验证用户是否为真实活体本人操作。
[0097]
第二种是非配合式活体检测(或静默活体检测技术)。其无需用户进行额外动作,可直接甄别纸张照片、屏幕成像、人脸面具等伪造人脸攻击。
[0098]
非配合式活体根据成像源的不同,一般分为红外图像、3d结构光和rgb图像三种技术路线,这三种路线又根据应用场景不同而各有优劣。
[0099]
①
红外图像的活体检测,需要用到红外摄像头。红外图像滤除了特定波段的光线,天生抵御基于屏幕的假脸攻击。不管是可见光还是红外光,本质都是电磁波。物体成像与其表面材质的反射特性有关。真实人脸和纸片、屏幕、立体面具等攻击媒介的反射特性都是不同的,所以成像效果也不同。这种表面材质差异在红外波反射方面会更加明显。当屏幕上的人脸出现在红外摄像头前,红外成像的画面里只有白花花一片,连人脸都无法显示,攻击也就无法得逞。
[0100]
②
3d结构光活体检测采用结构光/tof深度摄像头,引入了“深度信息”概念,能够很容易地辨别纸质照片、屏幕等2d媒介的假脸攻击。3d结构光需要采用3d摄像头,这样在拍摄人脸时,可以得到人脸区域的3d数据,并基于这些数据做进一步分析,最终判断出人脸是来自活体还是非活体。3d结构光可检测的非活体范围比较广泛的,包括电子屏幕上的照片和视频、印刷在不同材质上的照片(包含弯曲、折叠、剪裁、挖洞等情形)等。该检测路径的关键在于,基于活体和非活体的3d人脸数据,如何选择最具有区分度的特征来训练分类器,利用训练好的分类器来区分活体和非活体。
[0101]
③
rgb单目活体检测采用普通rgb摄像头即可,通过分析采集摩尔纹、成像畸形、反
射率等人像破绽,从而获得活体检测所需要的识别信息,通过多维度的识别依据保证了识别的准确性。
[0102]
综上所述:红外图像活体检测的检测成本中等,对屏幕和纸张类攻击防御能力优秀,对面具类攻击防御能力中良好;3d结构光活体检测的成本最高,效果最好,对屏幕、纸张和面具类攻击的防御能力都很优秀;rgb图像的检测成本较低,对屏幕和纸张类攻击防御性良好,对面具类攻击防御性一般。因此在本实施例中,基于保证本发明产品检测性能达标的同时还要保证成本可控的考虑,选用rgb和红外图像两种检测方式结合的方法。
[0103]ⅳ.饰物识别算法:
[0104]
人脸识别,是基于人的脸部特征信息进行身份识别的一种生物识别技术。用摄像机或摄像头采集含有人脸的图像或视频流,并自动在图像中检测和跟踪人脸,进而对检测到的人脸进行脸部的一系列相关技术,通常也叫做人像识别、面部识别。虽然其已经有多年的发展历史,但人脸识别技术在实际应用的过程中仍然受光照、视角、遮挡、年龄等多方面因素的影响;其中来自人员佩戴在面部的饰物(诸如口罩、墨镜、面巾、头巾、刘海等等)就需要先检测人员的是否由遮挡面部特征的饰物,如果有就提示人员将这些饰物取下。
[0105]
在本实施例中采用基于pca分析的检测方法,其包括两个关键步骤:在分析阶段,将遮挡人脸图像投影到人脸特征空间,并利用投影系数重建人脸;在检测阶段,将遮挡人脸图像与重建人脸图像进行比较,差异越大,判定为遮挡的可能性越大。遮挡区域根据重建人脸与原始遮挡人脸的差异来估计。
[0106]
存储模块9包括缓存单元和内存单元。
[0107]
其中,内存单元用于存储通行旅客的人脸数据,并通过专门的安全信道上传至云端服务器,再通过云端服务器接入公安系统,从而方便防疫部门查询疑似病例的行动轨迹,同时也方便防疫部门查询与疑似病例的密集人员。
[0108]
(三)
[0109]
门框1的顶端还设有辅助监控29,辅助监控29的拍摄视角朝向门框1的入口侧一端,其中辅助监控29用于检测门框1的入口处是否有旅客。
[0110]
门框1的入口侧一端的顶部还设有显示屏30(用于提示旅客是否被允许放行),辅助监控29和显示屏30均由计算机11控制。
[0111]
计算机11上还信号连接有显示器31,其中,显示器31面向旅客,这样可以方便处于防护栏12另一侧的工作人员看到旅客的测温结果。
[0112]
门框1入口端一侧的地面上还划设有与辅助监控29配合的标识线32,这样计算机11便可以通过辅助监控29检测旅客是否站在标识线32内,若在,则计算机11指令第二驱动组件和摄像机3工作,否则第二驱动组件和摄像机3均处于待机状态(其中,待机状态下:第二驱动组件中第一滑块19位于轨道板18的最上端,第二滑块23位于导轨22的中部,摄像机3水平;第一驱动组件中电动伸缩杆15处于最大伸展状态;闸门2均处于关闭状态)。
[0113]
(四)
[0114]
门框1入口端的地面开设有凹槽,并且凹槽处于标识线32与门框1之间。
[0115]
负压组件包括安装在凹槽上端槽口处的栅格板33、安装在凹槽下端槽口处的罩壳34、安装在罩壳34内部的空气倍增管35、设置在罩壳34上的出风管36以及设置在出风管36末端的负压泵37,并且空气倍增管35的吸风口、出风口分别处于垂直方向上的上端、下端,
空气倍增管35通过进气管与罩壳34外的离心式空气压缩机38的输出端连接。
[0116]
这样可以通过罩壳34、空气倍增管35、离心式空气压缩机38和负压泵37的配合,从而对栅格板33上方的空气进行抽吸,从而将站立栅格板33上的旅客呼出的空气以及其周围的空气进行从上至下的抽除(即负压组件工作时会在栅格板33的上方产生一个低压区域),从而避免正在接受摄像机3识别和测温的旅客(该状态下的旅客是已经脱下口罩)因呼吸、打喷嚏以及哈气等动作向外喷射出(含有致病菌的)的气溶胶溅射到身边的人或设备,从而避免造成交叉感染。
[0117]
其中空气倍增管35的机身内侧有一圈宽度仅为1.3毫米的环形裂隙。在这些小裂口之间,空气流紧贴着内壁流动的同时因为康达效应存在而带动周围大概15倍的空气流动后“吹”出清爽的凉风,时速可达35公里(即,其采用了射流泵(喷射器)的原理。通过利用一股高速运动的空气射流在喷嘴后方产生的一个负压区域,抽吸周围的空气)。
[0118]
此外,负压组件还可以对旅客鞋底进行一定程度的清洗,即将鞋底上的尘土进行一定的吸除。
[0119]
负压泵37的输出端还设有内部为特斯拉单向阀结构的单向管39;这样可以有效地保证被吸除的气体在负压组件中是单向流动的(即防止污浊的气体发生倒流);其中特斯拉无任何活动部件,不需要内部进行机械运动,利用空间结构推动气体流动,通过物理结构加速气体流动,减少气体在运输中的能量损耗,因此其可以弥补传统阀门因需要可移动部件而容易损坏的缺点。
[0120]
单向管39的末端设有内部有活性炭滤芯41的过滤装置40;这样可以通过活性炭滤芯41对负压泵37所要排放的气体进行过滤消毒,从而去除气体中的灰尘、气溶胶等等有害物质。
[0121]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1