基于串行总线通信技术的作业机器人控制系统的制作方法
1.本发明涉及作业机器人控制技术领域,具体涉及一种基于串行总线通信技术的作业机器人控制系统。该系统可应用于电力系统巡线、水下探测、爬壁清理等作业机器人。
背景技术:
2.作业机器人是现代自动控制领域的一项新技术,已成为现代工业的重要组成部分。机器人显著提高了劳动生产率和产品质量,也能够代替人工完成水下探测、电力巡线等工作,在改善劳动条件和产品快速升级方面发挥了非常重要的作用,所以,机器人内部控制系统的实用性和稳定性尤为重要,在成熟的控制流程下,内部通信线路的稳定可靠直接决定了控制单元对信号采集、处理结果后是否能够做出正确的判定和下一步运行,因此,控制系统内通信的稳定性尤为重要。
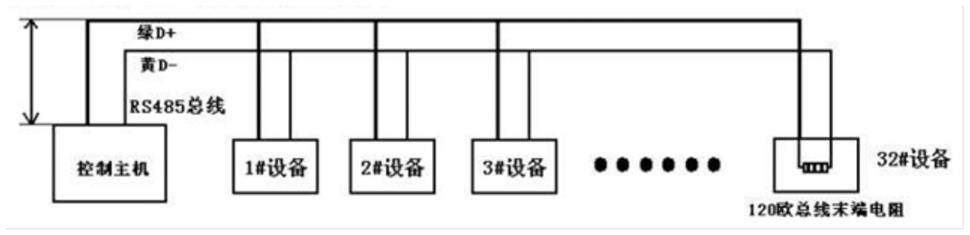
3.rs485总线控制技术可以在作业机器人中广泛使用,rs485总线可连接多达255个rs485接口设备,极限通信可达1500m的距离。采用差分信号方式,抗电磁干扰能力强。通信方式为“一主多从”。在电力系统巡线、水下探测、爬壁清理等作业机器人控制系统中,综合控制计算机是主控设备,所有传感器都在从控设备上。一般采用主从调用的方式来采集各个子单位的数据,即主单元依次调用各个子单位。如图1所示,总线的使用权完全由主单元分配,每个子单位不能擅自占用总线。
4.如果系统中有许多子单位,那么主单元在一个周期内收集信息需要很长时间。当子单位信息发生变化时,由于信息采集时间不一致,部分控制判定有关的信息不能及时发送到主单元,导致系统对突变事件的响应和处理速度非常慢,或者总线通信数据包丢失,从而导致机器人处于突发停机或违反指令延迟操作状态。
技术实现要素:
5.针对现有技术的不足,本发明提供一种基于串行总线通信技术的作业机器人控制系统,该控制系统采用rs485总线技术,总线上串联集成控制计算机和分系统各个部分传感器,该控制系统通讯只需两根屏蔽电缆,采用差分信号方式,抗电磁干扰能力强。
6.本发明所采用的技术方案是基于串行总线通信技术的作业机器人控制系统,包括一个主单元和n个子单位,n大于1,该控制系统的通信方式为rs485总线通信,集成控制计算机和传感器串联于rs485总线上,所述的主单元的主机包括stm32f407控制器、程序存储器、数据存储器、主机的rs485通信接口电路、电源和通信隔离电源;所述的子单位包括msp430f133单片机、子单位的rs485通信接口电路、系统电源和通信隔离电源;所述的主单元的主机采用39vf1601作为程序存储,hy57v641620hg作为数据存储器;所述的控制系统包括两个uart串行接口。
7.进一步优选,还包括电源电路,所述的电源电路采用开关电源,输出直流电压5v,通过内部sp1117-3.3芯片和sp1117-2.5芯片输出3.3v电源。
8.进一步优选,还包括隔离电路,所述的隔离电路的电平转换采用adi的adm2483芯
片。
9.进一步优选,还包括总线状态检测电路,所述的总线状态检测电路采用74hc125三态门芯片和两个单片机i/o口检测。
10.本发明的有益效果是:1、解决传统使用总线通信线路多信号通信冲突而导致系统对突变事件的响应和处理速度慢,总线通信数据包丢失等问题,能够使机器人作业过程中稳定按照控制流程运行,不会突发停机或违反指令延迟操作。
11.2、基于rs485总线通信技术,通过成熟设计可以减少机器人控制系统内部布线,节约内部空间体积,对比同类型机器人可以使内部控制系统所占空间进一步缩小,减少了整体的体积和重量。
12.3、采用pcb板卡走线通过高集中度设计,减少了内部相互电磁干扰,在节约体积的同时可以按照需求增加额外的功能模块,进一步拓展机器人的功能。
附图说明
13.图1为rs485总线通信布置图。
14.图2为基于串行总线通信技术的作业机器人控制系统框图。
15.图3为基于串行总线通信技术的作业机器人控制系统电路原理图。
16.图4为隔离485电路图。
17.图5为总线状态检测电路图。
18.图6为通信软件流程图。
具体实施方式
19.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件能够以各种不同的配置来布置和设计。
20.为了解决上述技术问题,本发明专利描述了一种基于串行总线通信技术的作业机器人控制系统,主机包括stm32f407控制器、程序存储器、数据存储器、主机的rs485通信接口电路、电源和通信隔离电源;子单位包括:msp430f133单片机、子单位的rs485通信接口电路、系统电源和通信隔离电源;主机采用39vf1601作为程序存储,hy57v641620hg作为数据存储器该系统采用rs485通信方式实现分系统与主系统的定时通信。采用该设计不仅布线简单,而且数据传输过程可以双向验证,能够保证数据的正确性,可以与机器人控制系统的数据进行交互,具有通用性;它可以通过命令触发机器人的目标行为。该控制系统解决传统使用rs485总线通信线路多信号通信冲突问题,通过内部基于单片机和集中器用来发送停电状态查询命令和监控共享传输介质和监控应答,防止两个或多个节点同时发送。如果存在冲突,将返回一个随机事件。冲突发生后,发送等待随机时间回复掉电状态的消息请求。节点的随机时间回复消息将确认多条传输消息。
21.该发明机器人的控制系统由主单元和多个子单位组成。通信方式为rs485总线通信。集成控制计算机和传感器在总线上串联;主机包括stm32f407控制器、程序存储器、数据存储器、主机的rs485通信接口电路、电源和通信隔离电源;子单位包括:msp430f133单片
机、子单位的rs485通信接口电路、系统电源和通信隔离电源;主机采用39vf1601作为程序存储,hy57v641620hg作为数据存储器;该系统由两个uart串行接口组成。adm2483用于接口转换;总线检测电路采用74hc125三态门芯片;其特征在于:子单位工作于发送前监听模式,子单位总线检测电路检测总线使用状态,总线状态检测采用74hc125三态门芯片和子单位单片机的两个i/o接口;系统不使用总线时,各单元74hc125输出高阻状态,总线两端低电平;子单位检测到总线状态为低电平。输出时,单元将74hc125设置为输出状态,总线变为高电平。单元占用总线并向总线发送数据。发送数据后,将74hc125设置为高阻状态;如果子单位检测到总线状态为高,它将继续检测,直到总线在占用总线之前变为低。
22.电源电路采用开关电源,输出直流电压为5v和3.3v。rs485所需的隔离5v电源由dc/dc模块产生。
23.采用发明下位机工作于发送前监听的方式,数据总线数据监控技术可以提高rs485串行数据总线的通信效率。
24.机器人控制系统采用rs485总线。集成控制计算机和传感器在总线上串联。整个系统由主单元和多个子单位组成,如图2所示。
25.主机包括stm32控制器、程序存储器、数据存储器组成mcu;隔离模块、输入输出接口,rs485接口电路、电源和通信隔离电源;子单位包括:msp430单片机、子单位通信的rs485接口电路、系统电源和通信隔离电源,如图3所示。
26.1.主机
27.主机控制板是主机的核心。主机控制采用stm32f407系列,可满足多任务的需求,10毫米封装,该系列可用于用于高集成度、高性能嵌入式存储器和外围设备。stm32f407提供了一个168兆赫的接口,stm32f407/417系列产品有512kb~1mb闪存和192kb sram。主机的外扩使用sst公司生产的39vf1601作为程序存储器flash,现代公司生产的hy57v641620hg作为数据存储器sdram。该系统具有两个uart串行接口,采用adi的隔离rs485芯片adm2483进行接口电平转换,采用74hc125三态门芯片进行总线状态检测。
28.2.从单位
29.从单位采用ti公司的msp430f133单片机作为微控制器。单片机处理速度可达8mhz,片上闪存8k字节,sram 256k字节。
30.3.电源
31.电源电路采用开关电源,开关电源输入电压范围宽,输出直流电压5v,3.3v电源通过内部sp1117-3.3和sp1117-2.5芯片输出。rs485所需的隔离5v电源通过dc/dc模块输出。
32.4.总线检测电路
33.总线状态检测采用74hc125三态门芯片和两个单片机i/o,如图5所示,当系统不使用总线时,各单元的74hc125输出高阻状态。此时,显示低电平。当一个单元想要使用总线时,它首先检测总线状态。如果总线为低电平,单元迅速将74hc125变为输出状态,此时总线变为高电平。单元占用总线并向总线发送数据。发送数据后,74hc125变为高电阻状态。如果检测到总线为高电平,则等待检测,直到总线变为低电平,然后再占用总线。
34.5.隔离485电路
35.adi的adm2483芯片,用于该控制系统隔离电路的电平转换,如图6所示,该芯片电路用于双电源输入和输出隔离。
36.6.软件设计
37.软件可以接收、处理各子单位上传的数据。主机通过rs485串口接收子机信息,数据格式为十六进制,用于通信的波特率为“115200,n,8,1”,即波特率为115200bps,无奇偶校验位,8位数据位,1位停止位。采用串口中断方式。主机软件初始化完成后,等待各子机构发送信息。信息数据框的格式如下:
38.表1通信协议
39.编号名称有效值类型 1设备编号 u8 2功能码 u16 3数据帧长度xu8 4数据1 u8 5数据2 u8 6...... u8 7数据n u8 8crc校验和 u16 40.该控制系统系统软件处理流程如下:
41.1.主机采集机构接收到分系统发出的第一个字节后,系统判断该字节是否为该设备号。如果不是设备号,则清除接收的字节数;
42.2.如果继续接收第二个字节,接下来确定第二个字节是否为正确的功能代码。如果功能码错误,复位接收字节数,重新接收;
43.3.如果功能代码正确,则继续接收第三个字节,即装置发送的字节数x。主机收到x字节后,判断crc校验码。如果校验码错误,丢弃接收到的数据帧,则重新接收;
44.4.主机确认校验码无误后,从单位上传的信息将会保存到数据区,同时该次上传接收判定结束,主机继续等待接收依次排列的从机构上传的数据。
45.5.主机接收到数据后,可以根据数据对相应的终端进行处理,也可以将数据发送给上位机。发送信息包括设备号、功能码、发送字节数、信息字节和crc校验码。
46.6.数据验证,发送器接收输入总线返回的数据,并将输入总线返回的数据与数据验证模块发送的当前数据进行比较;如果返回数据与当前发出的数据一致,则确认为有效数据,输出总线发出确认指令;如果返回的数据与当前发出的数据不一致,将被确认为无效数据,输出总线将发出错误处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1