一种轨迹筛选分类方法、装置、计算机设备和存储介质与流程
1.本技术涉及数据处理技术领域,尤其涉及一种轨迹筛选分类方法、装置、计算机设备和存储介质。
背景技术:
2.随着移动设备、移动互联网等技术的发展,用户、车辆等移动对象通常使用gps设备或终端设备如手机进行出行信息调查,其中,终端设备中均配有gps模块。通过使用gps设备或终端设备产生并记录更为细致和丰富的gps出行轨迹数据,接着,需要将产生并记录到的gps出行轨迹数据经过特定的算法处理才能得到出行研究所需的信息。进而,用户、车辆等移动对象可以通过出行信息对出行方式进行识别和划分。
3.目前,通常采用gps出行轨迹数据中的时间、经度、纬度、海拔、速度、方向、定位卫星数等基本参数信息来识别出行方式。根据预设算法和gps通识对gps出行轨迹数据进行数据处理输出识别结果。但通过上述方式仅利用gps自携带参数计算对数据处理,计算方式复杂、效率低且识别效果不直观。
技术实现要素:
4.本技术提供了一种轨迹筛选分类方法、装置、计算机设备和存储介质,以解决利用gps自携带参数计算,计算方式复杂、效率低且识别效果不直观的问题。
5.第一方面,本技术提供的一种轨迹筛选分类方法,包括:采集第一gps轨迹数据;将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数;将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。
6.可选的,还包括:根据所述目标特征参数整理对应出行方式的特征参数集合;随机将所述特征参数集合分为80%和20%两部分;其中,80%的所述特征参数集合用于模型训练,20%的所述特征参数集合用于验证测试。
7.可选的,所述将所述第一gps轨迹数据进行预处理,包括:将所述第一gps轨迹数据中的多个定位点进行清洗,以剔除无效定位点;根据清洗后的所述定位点与单位时长确定预设阈值;根据所述预设阈值对所述定位点进行抽希,以生成所述第二gps轨迹数据。
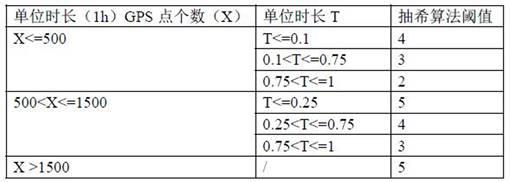
8.可选的,所述根据清洗后的所述定位点与单位时长确定预设阈值,包括:
当所述定位点的数量小于等于500且所述单位时长小于等于0.1h时,所述预设阈值为4;当所述定位点的数量小于等于500且所述单位时长小于等于0.75h、大于0.1h时,所述预设阈值为3;当所述定位点的数量小于等于500且所述单位时长小于等于1h、大于0.75h时,所述预设阈值为2;当所述定位点的数量小于等于1500、大于500且所述单位时长小于等于0.25h时,所述预设阈值为5;当所述定位点的数量小于等于1500、大于500且所述单位时长小于等于0.75h、大于0.25h时,所述预设阈值为4;当所述定位点的数量小于等于1500、大于500且所述单位时长小于等于1h、大于0.75h时,所述预设阈值为3;当所述定位点的数量大于1500时,所述预设阈值为5。
9.可选的,所述无效定位点包括发生漂移的定位点、与预设时间间隔不同的定位点、定位卫星数小于4的定位点以及字段信息不完整的定位点。
10.可选的,所述地图层级参数包括层级数,所述层级数的显示范围为3
‑
18;具体范围如下:所述层级数显示在3
‑
8时,地图比例尺的范围在50km
‑
1000km;所述层级数显示在9
‑
11时,地图比例尺的范围在5km
‑
20km;所述层级数显示在11
‑
18时,地图比例尺的范围在25m
‑
5km。
11.可选的,还包括:根据所述目标特征参数对出行方式进行分类,所述出行方式包括:飞机、火车、驾车、地铁、骑行和步行。
12.第二方面,本技术提供一种gps装置,包括:采集模块,用于采集第一gps轨迹数据;处理模块,用于将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数;电子地图模块,将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。
13.第三方面,本技术提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面中轨迹筛选分类方法的步骤。
14.第四方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中轨迹筛选分类方法的步骤。
15.由以上技术方案可知,本技术提供了一种轨迹筛选分类方法、装置、计算机设备和存储介质。方法包括:采集第一gps轨迹数据;将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数;将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠
加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。本技术突破二维gps点坐标的计算,得到了多维度立体的地图层级及行程意义参数。达到了轨迹的分类目的同时提高效率,且识别效果更佳。
附图说明
16.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单的介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1为一种轨迹筛选分类方法的流程示意图;图2为模型训练的结果示意图。
具体实施方式
18.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
19.图1为一种轨迹筛选分类方法的流程示意图。参见图1,本技术提供的一种轨迹筛选分类方法,包括:采集第一gps轨迹数据;将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数;将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。
20.在具体实现时,通常用户、车辆等移动对象通常使用gps设备或终端设备如手机进行出行信息调查。gps设备或终端设备根据gps国标进行信号采集第一gps轨迹数据。由于在技术数据分析中,解决采集数量工作量庞大,以及设备上报受到频率限制及精度不高,需对采集的第一gps轨迹数据进行预处理,其中,轨迹数据中包括多个定位点。首先将第一gps轨迹数据中的多个定位点进行清洗,以剔除无效定位点。其中,无效定位点包括发生漂移的定位点、与预设时间间隔不同的定位点、定位卫星数小于4的定位点以及字段信息不完整的定位点。
21.进一步地,根据清洗后的定位点与单位时长确定预设阈值,具体实施时,根据当前数据包括定位点进行枚举测试,得到反应结果后反观定值。参见表1,其中,定位点即为gps点个数x,单位时长t为1h。当所述定位点的数量小于等于500且所述单位时长小于等于0.1h时,所述预设阈值为4。当所述定位点的数量小于等于500且所述单位时长小于等于0.75h、大于0.1h时,所述预设阈值为3。当所述定位点的数量小于等于500且所述单位时长小于等于1h、大于0.75h时,所述预设阈值为2。当所述定位点的数量小于等于1500、大于500且所述单位时长小于等于0.25h时,所述预设阈值为5。当所述定位点的数量小于等于1500、大于
500且所述单位时长小于等于0.75h、大于0.25h时,所述预设阈值为4。当所述定位点的数量小于等于1500、大于500且所述单位时长小于等于1h、大于0.75h时,所述预设阈值为3。当所述定位点的数量大于1500时,所述预设阈值为5。
22.表1进一步地,根据上述预设阈值对定位点进行抽希,以生成第二gps轨迹数据。在一些实施例中,为了筛选分析冗余的问题,通常采用抽希算法。需要说明的是,阈值的确定以及算法的选用可以根据实际情况自行设置。例如,可在定位点的样本集中先通过对时间进行分组,分组完成后根据不同时间采用不同阈值的算法,对定位点进行抽希。设置不同阈值的目的是每个阈值对应算法不同,通过对样本gps处理舍去的个数进行限制,以保证最后数据结果的准确率。
23.进一步地,第二gps轨迹数据中包括多个轨迹对应的多个初始特征参数。初始特征参数包括用户编号、时间、经度、纬度、海拔、速度、方向、定位卫星、里程数、时间、平均速度、速度方向变化值幅度以及gps点个数。其中,gps点为定位点。接着,将第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据。其中,叠加轨迹数据包括轨迹自适应比例。示例性的,将叠加轨迹数据输入至设备的电子地图模块中,并根据设备窗口分辨率1024*1024,进行电子地图轨迹自适应。电子地图模块输出自适应比例,其中,电子地图模块包括地图软件开发工具包。通过电子地图模块反馈自适应比例之后确定地图层级参数,地图层级参数用于反映多个出行方式中的出行距离。将地图层级参数加入至上述初始特征参数中,以生成目标特征参数。目标特征参数包括用户编号、时间、经度、纬度、海拔、速度、方向、定位卫星、里程数、时间、平均速度、速度方向变化值幅度、gps点个数以及地图层级。
24.在一些实施例中,地图层级参数包括层级数,层级数具有一定的显示范围,显示范围为3
‑
18,层级数数值越小,地图缩略范围越大。具体范围如下:层级数显示在3
‑
8时,地图比例尺的范围在50km
‑
1000km;层级数显示在9
‑
11时,地图比例尺的范围在5km
‑
20km;层级数显示在11
‑
18时,地图比例尺的范围在25m
‑
5km。
25.进一步地,不同层级在地图显示的缩放比例尺不同,则反映用户出行方式出行距离。即可以根据地图层级参数对出行方式进行分类,参见表2为分类与地图层级的关系。其中,出行方式包括:飞机、火车、驾车、地铁、骑行和步行。需要说明的是,将得到的目标特征参数进行筛选,可以通过使用筛选后目标特征参数可知,例如,在层级数3
‑
8和9
‑
11中,特征参数中的平均速度超过一般交通出行方式,通过平均速度将飞机出行方式识别出来。例如,通过对样本集中地图层级小于8的点,进行初步筛选,并计算两点距离与起始点的时间戳,
平均速度在500km/h以上,在交通出行中为飞机的方式,针对这样的样本结果集在复查时正确率为100%。通过速度方向变化值和速度变化值将火车识别出来。例如,火车通常速度在60km/h以上。识别火车依据是,铁路行驶相对于道路行驶来说,速度平稳,火车且速度方向变化值小,通过计算每段行程的平均速度与统计gps点速度在60m/h以上的点,计算速度方差,结果小于3以内的判断为火车。对于层级在12
‑
18中,对行程样本数据计算,若在一段行程发现起点和终点之间存在gps缺失过多为地铁出行。通过速度和平均速度可识别步行和骑行,例如,通过筛选后的运动轨迹的行程时间与路程计算出平均速度和统计大于5m/s的gps点。大于5m/s的gps点占比低于2%,且平均速度小于2m/s为步行;否则为骑行。通过地图层级、行驶路程、时间以及平均速度将驾车识别出来,从而完成出行方式的分类。通过上述表格中对不同层级的出行方式进行分类,将其他出行方式识别出以后,剩下的驾车方式。由于驾车在道路中行驶,速度变化比较大,通过计算速度方差及平均速度将其识别出。
26.表2进一步地,本技术提供的方法还包括:根据目标特征参数整理对应出行方式的特征参数集合;随机将所述特征参数集合分为80%和20%两部分;其中,80%的所述特征参数集合用于模型训练,20%的所述特征参数集合用于验证测试。将80%的所述特征参数集合用于模型训练进行有监督学习时得到图2的结果。参见图2,地图层级、gps点个数在整个贡献率较高,其中通过对模型训练得出地图层级特征参数相关重要性达到62.5%。
27.由上述实施例可知,本技术通过采集轨迹数据,将数据中的gps点进行过滤清洗后,导入到电子地图模块中获取其每段行程在地图中显示的层级数也就是地图层级参数,通过将地图层级参数加入至初始特征参数中得到目标特征参数,将目标特征参数进行筛选,如计算该段行程的里程数、时间、瞬时速度以及平均速度等。最后,根据加入地图层级参数的目标特征参数进行出行方式的划分。通过加入地图层级参数可更有效地达到了轨迹的分类目的,同时也突破二维gps点坐标的计算,到了多维度立体的地图层级及行程意义参数。进一步地,还将日常出行的地铁出行方式划分至范围内。
28.本技术提供一种gps装置,包括:采集模块,用于采集第一gps轨迹数据。处理模块,用于将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数。电子地图模块,将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。需要说明的是,上述轨迹筛选分类方法应用于gps装置,gps装置执行上述轨迹筛选分类方法中的步骤,在此不再赘述。本技术提供的gps装置可以节省一定的硬件成本,例如使用在车联网企业中。
29.本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算
机程序,其特征在于,所述处理器执行所述计算机程序时实现上述轨迹筛选分类方法中的步骤,在此不再赘述。
30.本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述轨迹筛选分类方法中的步骤,在此不再赘述。
31.本技术提供了一种轨迹筛选分类方法、装置、计算机设备和存储介质。方法包括:采集第一gps轨迹数据;将所述第一gps轨迹数据进行预处理,得到第二gps轨迹数据;其中,所述第二gps轨迹数据包括多个轨迹对应的多个初始特征参数;将所述第二gps轨迹数据与电子地图轨迹进行gps图层叠加,以生成叠加轨迹数据;其中,所述叠加轨迹数据包括轨迹自适应比例;根据所述轨迹叠加图层反馈的所述自适应比例确定地图层级参数,所述地图层级参数用于反映多个出行方式中的出行距离;将所述地图层级参数加入至所述初始特征参数中,以生成目标特征参数。本技术突破二维gps点坐标的计算,得到了多维度立体的地图层级及行程意义参数。达到了轨迹的分类目的同时提高效率,且识别效果更佳。
32.本技术提供的实施例之间的相似部分相互参见即可,以上提供的具体实施方式只是本技术总的构思下的几个示例,并不构成本技术保护范围的限定。对于本领域的技术人员而言,在不付出创造性劳动的前提下依据本技术方案所扩展出的任何其他实施方式都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1