一种基于拥挤度的多目标优化求解方法及系统与流程
1.本发明属于飞行器总体方案多学科设计与优化技术领域,特别涉及一种基于拥挤度的多目标优化求解方法及系统。
背景技术:
2.飞行器设计优化在飞行器设计过程中是一项非常重要的环节,通过优化获得满足设计要求的搜索解。随着多目标优化技术的发展,在飞行器设计过程中越来越关注多个性能指标的影响,而不是关注某个单项指标的最优。
3.在多目标优化过程中,以pareto前沿(非劣解集)的均匀性和分布性为目标,开展优化算法搜索,完成优化问题求解。主要是构建pareto前沿,并通过分析pareto前沿的分布特点,指导优化算法进行搜索,逐渐获得优化问题的pareto解集。
4.pareto解集x:由pareto占优的解x
ij’组成的解集,其中i=1,...,n表示解集中各元素次序,j’=1,...,d,表示解集中各元素的维度;
5.pareto前沿y:对于x,通过优化函数f生成的y
ik
的集合,其中i=1,...,n,表示前沿集合中各元素次序,k=1,...,m,表示各前沿目标,y=f(x)。
6.然而,当前的多目标优化求解过程,考虑pareto前沿的特性,而不考虑对应的pareto解集的分布情况,这不利于pareto解集的评估,以及最终最优方案的确定。
技术实现要素:
7.本发明的目的在于克服上述缺陷,提供一种基于拥挤度的多目标优化求解方法,首先计算pareto前沿的拥挤度和pareto解集的拥挤度,后利用pareto前沿的拥挤度和pareto解集的拥挤度得到新的拥挤度,通过对所得新的拥挤度的分析,得到优化算法的下一步搜索方向,逐步获得最终的pareto前沿。本发明在pareto前沿分析基础上,增加对pareto解集的拥挤度分析,获得pareto解集的拥挤度(在搜索空间中的聚集程度),填补了现有技术的不足,求解方法更加准确快捷;本发明还提供了一种用于实现上述方法的系统。
8.为实现上述发明目的,本发明提供如下技术方案:
9.一种基于拥挤度的多目标优化求解方法,包括如下步骤:
10.s1利用拥挤度函数生成pareto前沿集合y中各元素的拥挤度r
1i
;y={y
ik
},其中i=1,...,n,表示前沿集合y中各元素次序,k=1,...,m,表示各前沿目标;
11.s2利用拥挤度函数生成pareto解集x中各元素的拥挤度r
2i
;x={x
ij’},其中i=1,...,n表示解集x中各元素次序,j’=1,...,d,表示解集中各元素的维度;
12.s3根据拥挤度r
1i
和拥挤度r
2i
计算新的拥挤度ri;所述ri=r
1i
/(r
1i
+1)+r
2i
/(r
2i
+1);
13.s4根据新的拥挤度ri得到pareto解集中的搜索解,并将搜索解作为优化函数下一步的搜索方向。
14.进一步的,步骤s1中,所述拥挤度函数通过小生境算法,熵函数或最大最小距离算
法生成。
15.进一步的,步骤s1中,所述拥挤度函数通过小生境算法生成,其中,d
ij
为pareto前沿集合y中,元素y
ik
和y
jk
之间的距离,i=1,...,n,j=1,...,n,且i≠j;s(d
ij
)为基于d
ij
的共享函数值。
16.进一步的,步骤s1中,所述
17.其中,σ
share
为给定的小生境半径。
18.进一步的,步骤s1中,
19.进一步的,步骤s2中,所述拥挤度函数通过小生境算法生成,其中,d'
ij
为pareto解集x中,元素x
ij’和x
jj’之间的距离,i=1,...,n,j=1,...,n,且i≠j;s(d'
ij
)为基于d'
ij
的共享函数值。
20.进一步的,步骤s2中,所述
21.其中,σ
share
为给定的小生境半径。
22.进一步的,步骤s2中,
23.进一步的,所述步骤s4中,根据新的拥挤度ri得到pareto解集中的搜索解的具体方法为:
24.在各新的拥挤度ri,i=1,...,n中选择最大值并记为r
t
,将与r
t
对应的x
tj’作为pareto解集中的搜索解,即下一步搜索方向。
25.一种基于拥挤度的多目标优化求解系统,用于实现上述一种基于拥挤度的多目标优化求解方法,包括数据存储模块,拥挤度计算模块,循环模块,条件选择模块,评价计算模块和输出模块;
26.数据存储模块用于存储多目标优化过程中产生的pareto解集x和pareto前沿集合y;
27.拥挤度计算模块在循环模块的调度下,利用拥挤度函数循环计算,得到pareto解集x中各元素的拥挤度r
2i
和pareto前沿集合y中各元素的拥挤度r
1i
;
28.评价计算模块用于根据挤度r
1i
和拥挤度r
2i
计算新的拥挤度ri;
29.条件选择模块用于根据新的拥挤度ri得到pareto解集中的搜索解;
30.输出模块用于根据搜索解输出下一步的搜索方向。
31.本发明与现有技术相比具有如下有益效果:
32.(1)本发明基于拥挤度的多目标优化求解方法,创新性的在pareto前沿分析基础上,增加对pareto解集的拥挤度分析,获得pareto解集的拥挤度,利用pareto前沿的拥挤度和pareto解集的拥挤度生成了新的拥挤度,解决了飞行器多目标优化寻优效率提升问题,扩展了多目标优化的求解方法,支撑飞行器设计水平提高;
33.(2)本发明基于拥挤度的多目标优化求解方法,选择新的拥挤度中的最大值所对应的搜索解作为优化函数下一步的搜索方向,方法简单且精确度高;
34.(3)本发明基于拥挤度的多目标优化求解系统,为本发明求解方法的实现提供了平台,利用多个模块的配合,能够实现多目标优化的快速、稳定求解,在飞行器总体方案多学科设计与优化技术领域具有深远意义。
附图说明
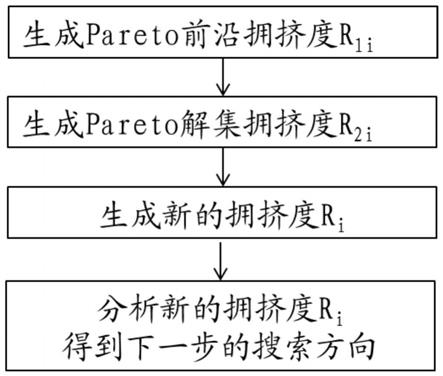
35.图1为本发明一种基于拥挤度的多目标优化求解方法流程图。
具体实施方式
36.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
37.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
38.如图1,本发明一种基于拥挤度的多目标优化求解方法,包括如下步骤:
39.s1利用拥挤度函数生成pareto前沿集合y中各元素的拥挤度r
1i
;y={y
ik
},其中i=1,...,n,表示前沿集合y中各元素次序,k=1,...,m,表示各前沿目标;
40.s2利用拥挤度函数生成pareto解集x中各元素的拥挤度r
2i
;x={x
ij’},其中i=1,...,n表示解集x中各元素次序,j’=1,...,d,表示解集中各元素的维度;
41.s3根据拥挤度r
1i
和拥挤度r
2i
计算新的拥挤度ri;所述ri=r
1i
/(r
1i
+1)+r
2i
/(r
2i
+1);
42.s4根据新的拥挤度ri得到pareto解集中的搜索解,并将搜索解作为优化函数下一步的搜索方向。
43.在一种优选的实施方式中,拥挤度函数通过小生境算法,熵函数或最大最小距离算法生成。
44.在一种优选的实施方式中,前沿集合y中各元素的拥挤度r
1i
的计算方法为,通过小生境算法生成拥挤度函数,首先计算pareto前沿集合y中所有元素之间的距离:
[0045][0046]
其中,i=1,2,
…
,n,j=1,2,
…
,n,且i≠j。
[0047]
相应的共享函数值:
[0048]
其中,σ
share
为给定的小生境半径。在此基础上,计算每个元素的小生境数,即为前沿集合y中各元素的拥挤度r
1i
:
[0049][0050]
其中,i=1,2,
…
,n,且i≠j。
[0051]
同理,pareto解集x中各元素的拥挤度r
2i
的计算方法为,首先计算pareto解集x中所有元素之间的距离:
[0052]
其中,i=1,2,
…
,n,j=1,2,
…
,n,且i≠j;
[0053]
相应的共享函数值:其中,σ
share
为给定的小生境半径。在此基础上,计算每个元素的小生境数,即为pareto解集x中各元素的拥挤度r
2i
:
[0054][0055]
在一种优选的实施方式中,步骤s4中,由r
1i
和r
2i
计算ri(i=1,...,n),在r
1i
(i=1,...,n)中,选择最大值r
imax
,并记录对应的元素次序t,即r
imax
=r
t
;选择对应元素次序t的x
tj’,作为优化函数f(x)下一步搜索方向。y=f(x)。
[0056]
本发明还提供一种基于拥挤度的多目标优化求解系统,用于实现上述求解方法,包括:
[0057]
数据存储模块,用于存储多目标优化过程中产生的pareto解集x和pareto前沿集合y,x={x
ij’},其中i=1,...,n表示解集x中各元素次序,j’=1,...,d,表示解集中各元素的维度,y={y
ik
},其中i=1,...,n,表示前沿集合y中各元素次序,k=1,...,m,表示各前沿目标;
[0058]
拥挤度计算模块,利用拥挤度函数,计算pareto解集x和pareto前沿集合y中各元素的拥挤度r
2i
=niche(i)和r
1i
=niche(i)(i=1,...,n)。
[0059]
循环模块,用于循环迭代,根据i和j,迭代调用其他模块循环,直到从1至n或m或d。
[0060]
评价计算模块,用于计算新的拥挤度ri(i=1,...,n)。
[0061]
条件选择模块,用于配合循环模块选择满足条件的对象,即pareto解集中的搜索解;
[0062]
输出模块,用于输出下一步搜索方向x
tj’(j’=1,...,d)。
[0063]
实施例1:
[0064]
基于本发明一种基于拥挤度的多目标优化求解方法及系统,以某飞行器为例,实
现了总体多目标优化,相比于其他方法,本发明的方法在寻优效率要求下,评估置信度提升20%,满足工程应用需求。
[0065]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
[0066]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1