含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法
1.本发明涉及系统可靠性技术领域,尤其涉及一种含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法。
背景技术:
2.现有的复杂系统中常含有多功能作用元件和多反馈路径的闭环环节,现有的系统如载人航天系统、发动机系统、综合传动装置电液控制系统、智能车辆系统等,对该类系统的可靠性提出了越来越高的要求。这些系统中常含有多功能作用元件和多反馈路径的闭环环节,如装甲车发动机的燃油供给系统中,控制器具有开闭油路和调节油路油量大小两种功能,燃油的输出路径和喷油泵、喷油器的回油反馈路径构成一个多反馈路径的闭环环节。多功能作用元件具有如下特点:多种功能输出的特点。多反馈路径的闭环环节具有如下特点:多反馈路径的闭环环节通常由多个输入信号、输出路径、多条反馈路径组成,其中输出路径和反馈路径可以为任意结构,输入信号既可以是独立输入信号,也可以为作用在输出路径和反馈路径元件上的输入信号。多功能作用元件和多反馈路径的闭环环节的可靠性影响着整个系统的性能稳定性和输出准确性,要求其具有高可靠性,以保证系统能长时间正常运行,因此确定含有多功能作用元件和多反馈路径的闭环环节的系统可靠性方法至关重要。目前确定这类系统可靠性的方法主要是go法,go法(go methodology)是一种从成功角度确定系统可靠性的方法,目前该方法对于确定具有多功能作用元件的系统可靠性而言,一般采用把多功能作用元件的上述特点忽略或弱化,再采用go法确定系统可靠性,这样会导致确定的系统可靠性精度低,甚至得到系统的可靠性并不符合真实的情况。由于go法现有的操作符无法用于描述上述的多反馈路径的闭环环节,从而无法对含有多反馈路径的闭环环节的复杂系统进行可靠性建模与分析。
技术实现要素:
3.基于此,针对以上问题,本发明提供一种含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,提高了确定该类系统可靠性参数的计算精度,扩大了go法对该类系统进行可靠性建模与分析的适用范围。
4.本发明提供了一种含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,步骤一:绘制需确定可靠性的系统结构原理图,所绘制的系统结构原理图中组成框对应系统的组成元件,信号流与系统工作时的信息流一致;
5.步骤二:绘制需确定可靠性系统的go图模型,根据步骤一所绘制的系统结构原理图,绘制该系统go图模型,所绘系统go图模型中的信号流与该系统结构原理图的信号流一致,且将系统中的多功能作用元件本身表示为类型15a操作符,将系统中的信号分流作用元件本身表示为类型26操作符,将系统中有信号而导通的信号分流作用元件本身表示为类型26b操作符,将系统中的信号调节作用元件本身表示为类型27操作符,将系统中多反馈路径
的闭环环节表示为类型24b操作符,系统中其余元件和元件与元件之间的逻辑关系依据《go法原理及应用》(沈祖培,黄祥瑞编著,2004.8)中的基本操作符选取;
6.步骤三:确定go图模型中各个操作符对应元件的成功概率数据,所述成功概率数据即为每个操作符对应元件的可靠度。根据系统中元件的类型和自身参数,通过查产品手册或者实验统计数据确定元件的可靠度,其中多功能作用元件输出的成功概率数据、信号分流作用元件输出的成功概率数据、有信号而导通的信号分流作用元件输出的成功概率数据、信号调节作用元件的输出成功概率数据和多反馈路径闭环环节的成功概率数据按照下列公式确定,即类型15a操作符、类型26操作符、类型26b操作符、类型27操作符和类型24b操作符的定量计算公式如下:
7.(1)类型15a操作符的定量计算公式为:
8.p
r-i
(1)=p
s-i
(1)
·
pc(1)
9.式中,i——表示多功能作用元件的功能模式编号,i的个数为多功能作用元件的功能模式数,即有几种功能就对应几个编号;
10.s-i——表示多功能作用元件在功能模式i作用时的输入信号;
11.p
s-i
(1)——表示多功能作用元件在功能模式i作用时输入信号的成功概率;
12.pc(1)——表示多功能作用元件自身的成功概率;
13.p
r-i
(1)——表示多功能作用元件在功能模式i作用时输出信号的成功概率;
14.(2)类型26操作符的定量计算公式为:
15.p
r-i
(1)=ps(1)
·
pc(1)
16.式中,i——表示信号分流作用元件产生输出信号的编号,i的个数为输出信号数,即有几个输出信号就对应几个编号;
17.r-i——表示信号分流作用元件产生的第i个输出信号;
18.ps(1)——表示信号分流作用元件的输入信号的成功概率;
19.pc(1)——表示信号分流作用元件自身的成功概率;
20.p
r-i
(1)——表示信号分流作用元件产生的第i个输出信号的成功概率;
21.(3)类型26b操作符的定量计算公式为:
22.p
r-i
(1)=p
s1
(1)
·
p
s2
(1)
·
pc(1)
23.式中,i——表示有信号而导通的信号分流作用元件产生输出信号的编号,i的个数为输出信号数,即有几个输出信号就对应几个编号;
24.r-i——表示有信号而导通的信号分流作用元件产生的第i个输出信号;
25.s1——表示有信号而导通的信号分流作用元件的主输入信号,即被分流的输入信号;
26.s2——表示有信号而导通的信号分流作用元件的次输入信号,即通过次输入信号的作用对主输入信号进行分流;
27.p
s1
(1)——表示有信号而导通的信号分流作用元件的主输入信号的成功概率;
28.p
s2
(1)——表示有信号而导通的信号分流作用元件的次输入信号的成功概率;
29.pc(1)——表示信号分流作用元件自身的成功概率;
30.p
r-i
(1)——表示信号分流作用元件产生的第i个输出信号的成功概率;
31.(4)类型27操作符的定量计算公式为:
32.pr(1)=p
s1
(1)
·
p
s2
(1)
·
pc(1)
33.式中,s1——表示信号调节作用元件的主输入信号,即被调节的输入信号;
34.s2——表示信号调节作用元件的次输入信号,即通过次输入信号的作用对主输入信号进行调节;
35.p
s1
(1)——表示信号调节作用元件主输入信号的成功概率;
36.p
s2
(1)——表示信号调节作用元件次输入信号的成功概率;
37.pc(1)——表示信号调节作用元件自身的成功概率;
38.pr(1)——表示信号调节作用元件在次输入信号s2作用时输出信号的成功概率;
39.(5)类型24b操作符的定量计算公式为:
[0040][0041]
式中,m——表示多反馈路径闭环环节中反馈路径的编号,m的个数为反馈路径数,即有几条反馈路径就对应几个编号;
[0042]
i——表示多反馈路径闭环环节的输入信号编号,i的个数为输入信号数,即有几个输入信号就对应几个编号;
[0043]
f-m——表示多反馈路径闭环环节中第m条反馈路径;
[0044]
s-i——表示多反馈路径闭环环节的第i个输入信号;
[0045]
pc(1)——表示多反馈路径闭环环节中等效输出路径c的成功概率;
[0046]
p
f-m
(1)——表示多反馈路径闭环环节中第m条反馈路径的成功概率;
[0047]
p
s-i
(1)——表示多反馈路径闭环环节第i个输入信号的成功概率;
[0048]
pr(1)——表示多反馈路径闭环环节输出信号流的成功概率;
[0049]
步骤四:确定含有多功能输入信号多反馈路径的闭环系统可靠性,确定系统可靠性也就是确定系统的成功概率,即系统可靠度,根据步骤三确定系统中所有元件的可靠度后,按照go法定量运算方法确定系统输出信号流的可靠度,系统输出信号流的可靠度就是系统的可靠性量化值。
[0050]
本发明提供的含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,(1)克服了原有go法无法对含有多反馈路径的闭环复杂系统进行可靠性建模的难题,同时给出相应的可靠性计算方法,提高了确定有多反馈路径的闭环复杂系统可靠性计算的精度;(2)本发明确定了操作符类型15a、操作符类型26、操作符类型26b和操作符类型27,扩充了go法操作符的种类,从而拓展了go法的功能,扩大了go法对复杂系统进行可靠性建模与分析的适用范围。
附图说明
[0051]
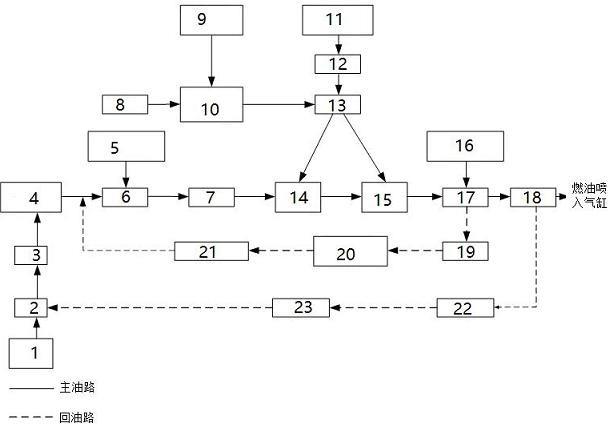
图1为本发明一实施方式的燃油供给系统的结构原理图;
[0052]
图2为本发明中的15a操作符符号示意图;
[0053]
图3为本发明中的26操作符符号示意图;
[0054]
图4为本发明中的26b操作符符号示意图;
[0055]
图5为本发明中的27操作符符号示意图;
[0056]
图6为多反馈路径闭环环节结构示意图;
[0057]
图7为本发明中的24b操作符符号示意图;
[0058]
图8为图1所示的双反馈路径闭环环节的等效输出结构c的go图模型;
[0059]
图9为图1所示的双反馈路径闭环环节的两个等效反馈结构f1、f2的go图模型;
[0060]
图10为图1所示的双反馈路径闭环环节的go图模型;
[0061]
图11为图1所示的go图模型。
[0062]
图中:输入加油信号1、输油泵齿轮传动信号5、电源8、开关控制信号9、脚踏板控制信号11、喷油泵齿轮传动信号16、燃油箱2、粗滤器3、进油管柔性接点4、输油泵6、燃油滤7、电控系统电源开关10、脚踏板12、多功能作用元件控制器13、断油电磁阀14、信号调节作用元件喷油泵调速器15、有信号而导通的信号分流作用元件喷油泵17、信号分流作用元件喷油器18、止回阀19、回油管柔性接点20、燃油冷却器21、浮子活门22、膨胀油箱23。
具体实施方式
[0063]
下面将结合本发明实施例中的附图。对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得所有其他实施例,都属于本发明的保护范围。可以理解的是,附图仅仅提供参考与说明用,并非用来对本发明加以限制。附图中显示的连接关系仅仅是为了便于清晰描述,并不限定连接方式。
[0064]
请参阅图1-图11,本发明提供一种含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,步骤一:绘制出需确定可靠性的系统结构原理图,即根据含有多功能输入信号的多反馈路径的闭环系统组成元件和工作原理确定该系统结构原理图的组成框和信号流;所绘制的系统结构原理图中组成框对应系统的组成元件,信号流与系统工作时的信息流一致。
[0065]
如图1所示,本发明应用的系统为含有多功能输入信号的双反馈路径的闭环的燃油供给系统,此系统主要由三部分组成:燃油输出路径、两条燃油反馈路径以及燃油油路控制作用部分。其中燃油输出路径与燃油反馈路径组成了一个双反馈路径的闭环环节,燃油油路控制部分输出元件为多功能作用元件,其输出信号为闭环环节的多功能输入信号,燃油输出路径的输出受燃油反馈路径输出和燃油油路控制部分输出的影响。
[0066]
步骤二:绘制含有多功能输入信号多反馈路径的闭环系统的go图模型,go图模型由描述元件功能的操作符和描述元件与元件之间逻辑关系的操作符以及操作符之间的信号流连接组成。go图模型中的“字符-数字”为操作符的类型和编号,字符表示操作符的类型;数字表示元件的编号或元件与元件逻辑关系的编号。根据步骤一的所绘制的系统结构原理图,绘制该系统go图模型,其中,如图2所示,将多功能作用元件本身表示为类型15a操作符,即操作符的类型为字符15a;如图3所示,将系统中的信号分流作用元件本身表示为类型26操作符,即操作符的类型为字符26;如图4所示,将系统中有信号而导通的信号分流作用元件本身表示为类型26b操作符,即操作符的类型为字符26b;如图5所示,将系统中的信号调节作用元件本身表示为类型27操作符,即操作符的类型为字符27;如图7所示,将系统中多反馈路径闭环环节表示为类型24b操作符,即操作符的类型为24b;系统中其余元件和元件以及元件间的逻辑关系依据《go法原理及应用》(沈祖培,黄祥瑞编著,2004.8)中的基本操作符中选取;且所绘系统go图模型的信号流与该系统结构原理图的信号流一致。
[0067]
步骤三:确定go图模型中各个操作符对应元件的成功概率数据,所述成功概率数据即为每个操作符对应元件的可靠度。根据系统中元件的类型和自身参数,通过查产品手册或者实验统计数据确定元件的可靠度。其中多功能作用元件输出的成功概率数据、信号分流作用元件输出的成功概率数据、有信号而导通的信号分流作用元件输出的成功概率数据、信号调节作用元件输出的成功概率数据和多反馈路径闭环环节的成功概率数据按照下列公式确定,即类型15a操作符、类型26操作符、类型26b操作符、类型27操作符和类型24b操作符的定量计算公式如下:
[0068]
1)类型15a操作符的定量计算公式为:
[0069]
p
r-i
(1)=p
s-i
(1)
·
pc(1)
[0070]
式中,i——表示多功能作用元件的功能模式编号,i的个数为多功能作用元件的功能模式数,即有几种功能就对应几个编号;
[0071]
s-i——表示多功能作用元件在功能模式i作用时的输入信号;
[0072]
p
s-i
(1)——表示多功能作用元件在功能模式i作用时输入信号的成功概率;
[0073]
pc(1)——表示多功能作用元件自身的成功概率;
[0074]
p
r-i
(1)——表示多功能作用元件在功能模式i作用时输出信号的成功概率;
[0075]
2)类型26操作符的定量计算公式为:
[0076]
p
r-i
(1)=ps(1)
·
pc(1)
[0077]
式中,i——表示信号分流作用元件产生输出信号的编号,i的个数为输出信号数,即有几个输出信号就对应几个编号;
[0078]
r-i——表示信号分流作用元件产生的第i个输出信号;
[0079]
ps(1)——表示信号分流作用元件的输入信号的成功概率;
[0080]
pc(1)——表示信号分流作用元件自身的成功概率;
[0081]
p
r-i
(1)——表示信号分流作用元件产生的第i个输出信号的成功概率;
[0082]
3)类型26b操作符的定量计算公式为:
[0083]
p
r-i
(1)=p
s1
(1)
·
p
s2
(1)
·
pc(1)
[0084]
式中,i——表示有信号而导通的信号分流作用元件产生输出信号的编号,i的个数为输出信号数,即有几个输出信号就对应几个编号;
[0085]
r-i——表示有信号而导通的信号分流作用元件产生的第i个输出信号;
[0086]
s1——表示有信号而导通的信号分流作用元件的主输入信号,即被分流的输入信号;
[0087]
s2——表示有信号而导通的信号分流作用元件的次输入信号,即通过次输入信号的作用对主输入信号进行分流;
[0088]
p
s1
(1)——表示有信号而导通的信号分流作用元件的主输入信号的成功概率;
[0089]
p
s2
(1)——表示有信号而导通的信号分流作用元件的次输入信号的成功概率;
[0090]
pc(1)——表示信号分流作用元件自身的成功概率;
[0091]
p
r-i
(1)——表示信号分流作用元件产生的第i个输出信号的成功概率;
[0092]
4)类型27操作符的定量计算公式为:
[0093]
pr(1)=p
s1
(1)
·
p
s2
(1)
·
pc(1)
[0094]
式中,s1——表示信号调节作用元件的主输入信号,即被调节的输入信号;
[0095]
s2——表示信号调节作用元件的次输入信号,即通过次输入信号的作用对主输入信号进行调节;
[0096]
p
s1
(1)——表示信号调节作用元件主输入信号的成功概率;
[0097]
p
s2
(1)——表示信号调节作用元件次输入信号的成功概率;
[0098]
pc(1)——表示信号调节作用元件自身的成功概率;
[0099]
pr(1)——表示信号调节作用元件在次输入信号s2作用时输出信号的成功概率;
[0100]
5)类型24b操作符的定量计算公式为:
[0101][0102]
式中,m——表示多反馈路径闭环环节中反馈路径的编号,m的个数为反馈路径数,即有几条反馈路径就对应几个编号;
[0103]
i——表示多反馈路径闭环环节的输入信号编号,i的个数为输入信号数,即有几个输入信号就对应几个编号;
[0104]
f-m——表示多反馈路径闭环环节中第m条反馈路径;
[0105]
s-i——表示多反馈路径闭环环节的第i个输入信号;
[0106]
pc(1)——表示多反馈路径闭环环节中等效输出路径c的成功概率;
[0107]
p
f-m
(1)——表示多反馈路径闭环环节中第m条反馈路径的成功概率;
[0108]
p
s-i
(1)——表示多反馈路径闭环环节第i输入信号的成功概率;
[0109]
pr(1)——表示多反馈路径闭环环节输出信号流的成功概率;
[0110]
步骤四:确定含有多功能输入信号多反馈路径的闭环系统的可靠性,确定系统可靠性也就是确定系统的成功概率,即系统可靠度。根据步骤三确定系统中所有元件的可靠度后,按照《go法原理及应用》(沈祖培,黄祥瑞编著,2004.8)中的go法定量运算方法确定系统输出信号流的可靠度,系统输出信号流的可靠度就是系统的可靠性量化值。
[0111]
在一个实施方式中,以某装甲车辆柴油机系统中的燃油供给系统为例,采用本发明的可靠性确定方法确定该系统的可靠性。
[0112]
步骤一:绘制出需确定可靠性的系统结构原理图。根据燃油供给系统的组成结构和工作原理,绘制其系统结构原理图,如图1所示,燃油供给系统包括输入加油信号1、输油泵齿轮传动信号5、电源8、开关控制信号9、脚踏板控制信号11、喷油泵齿轮传动信号16、燃油箱2、粗滤器3、进油管柔性接点4、输油泵6、燃油滤7、电控系统电源开关10、脚踏板12、多功能作用元件控制器13、断油电磁阀14、信号调节作用元件喷油泵调速器15、有信号而导通的信号分流作用元件喷油泵17、信号分流作用元件喷油器18、止回阀19、回油管柔性接点20、燃油冷却器21、浮子活门22、膨胀油箱23。
[0113]
表1为某装甲车辆柴油机系统中的燃油供给系统各元件和逻辑关系对应的操作符类型与操作符编号。
[0114]
表一
[0115]
编号部件名称操作符类型1加油信号52燃油箱13粗滤器1
4进油管柔性接点15输油泵齿轮传动信号56输油泵67燃油滤18电源59开关控制信号510电控系统电源开关611脚踏板控制信号512脚踏板113控制器15a14断油电磁阀615喷油泵调速器2716喷油泵齿轮传动信号517喷油泵26b18喷油器2619止回阀120回油管柔性接点121燃油冷却器122浮子活门123膨胀油箱124多反馈路径闭环环节24b25虚拟输入单元virtual526虚拟输入单元virtual527虚拟输入单元virtual528虚拟输入单元virtual529虚拟输入单元virtual530虚拟输入单元virtual531虚拟输入单元virtual5
[0116]
步骤二:根据步骤一绘制有含有多功能输入信号多反馈路径的闭环系统的go图模型。
[0117]
1)选择操作符。如图1所示,某装甲车辆发动机燃油供给系统结构原理图,控制器13在燃油供给系统中具有两种功能,一是电控系统电源开关10输出信号作用于控制器13,控制器13执行燃油供给系统油路开闭功能;二是脚踏板12输出信号作用于控制器13,控制器13执行燃油供给系统油量调节功能。因此选用类型15a操作符来表示控制器13。喷油泵17将燃油输送到喷油器18后分流,燃油一部分经喷油口完成喷油动作,另一部分经回油口完成回油动作。因此选用类型26操作符来表示喷油器18这种具有信号分流作用的元件。经喷油泵调速器15进入喷油泵17的燃油也产生分流,燃油一部分经喷油口完成喷油动作,另一部分经回油口完成回油动作。但必须要有喷油泵齿轮传动信号16输入,喷油泵17才能完成喷油动作和回油动作。因此选用类型26b操作符来表示喷油泵17这种有信号而导通的信号
分流作用元件。喷油泵调速器15受控制器13输出调节功能信号的作用,调节燃油供给系统油路的油量大小,但喷油泵调速器15不能导通和关断油路。因此选用类型27操作符来表示喷油泵调速器15这种具有信号调节作用的元件。某装甲车辆发动机燃油供给系统是一个含有多功能输入信号双反馈路径的闭环系统,其正常工作要保证含有多功能输入信号双反馈路径的闭环环节的各输入信号、等效输出结构c和两个等效反馈结构f1、f2均正常工作,因此选用类型24b操作符描述双反馈路径的闭环环节24。系统中其余元件和元件与元件之间的逻辑关系依据《go法原理及应用》(沈祖培,黄祥瑞编著,2004.8)中的基本操作符选取。
[0118]
2)建立一级go图模型,即建立含有多功能输入信号的双反馈路径的闭环环节go图模型。如图8所示,某装甲车辆发动机燃油供给系统中含有多功能输入信号的双反馈路径的闭环环节的等效输出结构go图模型,其中操作符25、操作符26、操作符27、操作符28和操作符29为输出信号成功概率为1的虚拟输入操作符;如图9所示,某装甲车辆发动机燃油供给系统中含有多功能输入信号的双反馈路径的闭环环节的两个等效反馈结构go图模型,其中操作符30和操作符31为输出信号成功概率为1虚拟输入操作符;如图10所示,某装甲车辆发动机燃油供给系统中含有多功能输入信号的双反馈路径的闭环环节的go图模型。
[0119]
3)建立二级go图模型,即建立完整的某装甲车辆燃油供给系统go图模型。如图11所示,某装甲车辆发动机燃油供给系统go图模型,操作符的第1个数字编号代表操作符类型,第2个数字代表操作符编号;信号流上的数字代表信号流编号;信号流24为燃油供给系统的输出。
[0120]
步骤三:确定go图模型中各个操作符对应元件的成功概率数据。
[0121]
1)根据步骤二,控制器13的操作符类型表示为15a,控制器13的操作符类型15a的定量计算公式为:
[0122][0123]
式中,p
13-1
(1)为控制器13执行燃油供给系统油路开闭功能时控制器13输出信号的成功概率,p
13-2
(1)为执行燃油供给系统油量调节功能时输出信号的成功概率,p
10-1
(1)为执行燃油供给系统油路开闭功能时电控系统电源开关10输出信号的成功概率,p
12-2
(1)为执行燃油供给系统油量调节功能时脚踏板12输出信号的成功概率,p
c13
(1)为控制器13自身的成功概率。
[0124]
2)根据步骤二,喷油器18的操作符类型表示为26,喷油器18的操作符类型26的定量计算公式为:
[0125][0126]
式中,p
18-1
(1)为喷油器18输出喷油信号的成功概率,p
18-2
(1)为喷油器18输出回油信号的成功概率,p
s17-1
(1)为喷油泵17输出喷油信号的成功概率,p
c18
(1)为喷油器18自身的成功概率。
[0127]
3)根据步骤二,喷油泵17的操作符类型表示为26b,喷油泵17的操作符类型26b的定量计算公式为:
[0128][0129]
式中,p
17-1
(1)为喷油泵17输出喷油信号的成功概率,p
17-2
(1)为喷油泵17输出回油信号的成功概率,p
s15
(1)为喷油泵调速器15输出信号的成功概率,p
s16
(1)为喷油泵齿轮传动信号16输出信号的成功概率,p
c17
(1)为喷油泵17自身的成功概率。
[0130]
4)根据步骤二,喷油泵调速器15的操作符类型表示为27,喷油泵调速器15的操作符类型27的定量计算公式为:
[0131]
p
r15
(1)=p
s14
(1)p
s13-2
(1)p
c15
(1)
[0132]
式中,p
r15
(1)为喷油泵调速器15输出信号的成功概率,p
s14
(1)为断油电磁阀14输出信号的成功概率,p
13-2
(1)为燃油供给系统油量调节功能时控制器13输出信号的成功概率,p
c15
(1)为喷油泵调速器15自身的成功概率。
[0133]
5)根据步骤二,某装甲车辆发动机燃油供给系统是一个含有多功能输入信号双反馈路径的闭环系统,其正常工作要保证含有多功能输入信号双反馈路径的闭环环节的各输入信号、等效输出结构和两个等效反馈结构均正常工作,因此选用类型24b操作符描述双反馈路径的闭环环节24,双反馈路径的闭环环节24的操作符类型24b的定量计算公式为:
[0134]
p
r24
(1)=pc(1)p
f-1
(1)p
f-2
(1)p
s1
(1)p
s5
(1)p
s16
(1)p
s13-1
(1)p
s13-2
(1)
[0135]
式中,p
r24
(1)为双反馈路径的闭环环节24输出信号的成功概率,pc(1)为双反馈路径的闭环环节的等效输出结构c输出信号的成功概率,p
f-1
(1)为双反馈路径的闭环环节的等效输出结构f1输出信号的成功概率,p
f-2
(1)为双反馈路径的闭环环节的等效输出结构f2输出信号的成功概率,p
s1
(1)为加油信号1输出信号的成功概率,p
s5
(1)为输油泵齿轮传动信号5输出信号的成功概率,p
s16
(1)为喷油泵齿轮传动信号16输出信号的成功概率,p
13-1
(1)为燃油供给系统油路开闭功能时控制器13输出信号的成功概率,p
13-2
(1)为燃油供给系统油量调节功能时控制器13输出信号的成功概率。
[0136]
4)根据元件的类型和参数,通过查产品手册或者实验统计数据确定某装甲车辆发动机燃油供给系统元件成功概率即可靠度,如表2所示。
[0137]
表2
[0138]
编号部件名称操作符类型可靠度1加油信号50.9999992燃油箱10.9998953粗滤器10.9998624进油管柔性接点10.9996235输油泵齿轮传动信号50.9997166输油泵60.9995347燃油滤10.9999158电源50.9999369开关控制信号50.99999610电控系统电源开关60.99995711脚踏板控制信号50.999994
12脚踏板10.99986213控制器15a0.99974414断油电磁阀60.99935615喷油泵调速器270.99959416喷油泵齿轮传动信号50.99975817喷油泵26b0.99938618喷油器260.99965219止回阀10.99995320回油管柔性接点10.99962321燃油冷却器10.99933522浮子活门10.99998423膨胀油箱10.99989525虚拟输入单元virtual5126虚拟输入单元virtual5127虚拟输入单元virtual5128虚拟输入单元virtual5129虚拟输入单元virtual5130虚拟输入单元virtual5131虚拟输入单元virtual51
[0139]
步骤四:确定某装甲车辆发动机燃油供给系统的成功概率即可靠度,根据步骤三确定系统中所有元件的可靠度,按照《go法原理及应用》(沈祖培,黄祥瑞编著,2004.8)中的go法定量运算方法确定系统输出信号流的可靠度为0.994327。
[0140]
上述结果表明,采用本发明确定含多功能输入信号多反馈路径的闭环系统可靠性计算的精度高于现有方法,且解决了现有go法无法准确处理多反馈路径的闭环系统的可靠性建模与分析的难题。
[0141]
本发明的含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,解决了对某装甲车辆发动机燃油供给系统的可靠性建模与分析难题,我们只需确定该系统组成零部件的可靠性参数,就可以得到该系统的可靠性参数。
[0142]
本发明的含有多功能输入信号多反馈路径的闭环系统可靠性的确定方法,(1)克服了原有go法无法对含有多反馈路径的闭环复杂系统进行可靠性建模的问题,同时给出相应的可靠性计算方法,提高了确定有多反馈路径的闭环复杂系统可靠性的精度;(2)本发明确定了操作符类型15a、操作符类型24b、操作符类型26、操作符类型26b和操作符类型27,扩充了go法操作符的种类,从而拓展了go法的功能,扩大了go法在对复杂系统进行可靠性建模与分析的适用范围。
[0143]
上述实施例仅表达了本发明的实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1