一种安全距离检测方法及装置与流程
1.本技术涉及配网规划领域,特别是一种安全距离检测方法及装置。
背景技术:
2.随着社会科学技术的发展,人们对于电能的需求越来越多,为了更好的管理用电设备,配电房就成了与人们用电相关的必备场所。
3.配电房会受到外部环境、内部空间、房内电气接线等不同因素的影响,其室内空间大小和设备布置方式都有很大的不同。为保证配电房内各种电器设备的正常维修与防护的需要,相关规范中规定了电器设备到周边设备或配电房墙壁的最小间距(称作安全距离),规划人员在配网规划过程中,必须掌握配电房内设备分布及其空间位置,才能在配网规划设计时保证安全距离。
4.现有的方法通常是规划人员对配电房进行拍照,依据照片判断能否满足拼柜或新增母线等改造。该方法精度低,参照照片进行的设计往往与实地不符,无法保证安全距离,需要多次到现场丈量验证,效率低下,有诸多不便,如何提高测量安全距离的效率是人们关注的问题。
技术实现要素:
5.有鉴于此,本技术提供了一种安全距离检测方法及装置,用于提高测量安全距离的效率。
6.为了实现上述目的,现提出的方案如下:
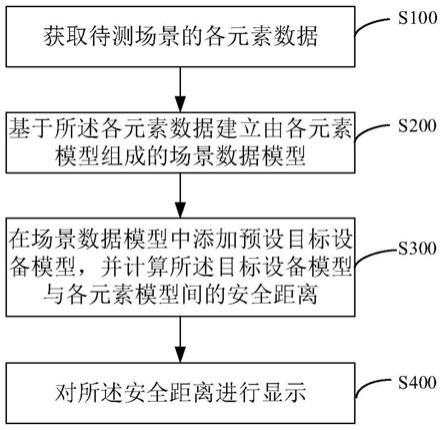
7.一种安全距离检测方法,包括:
8.获取待测场景的各元素数据;
9.基于所述各元素数据建立由各元素模型组成的场景数据模型;
10.在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离;
11.对所述安全距离进行显示。
12.可选的,所述获取待测场景的各元素数据,包括:
13.扫描获取所述待测场景的原始全景点云;
14.对所述原始全景点云进行聚类,得到各元素点云;
15.将聚类后的所述各元素点云建模得到所述待测场景的各元素模型对应的元素数据。
16.可选的,所述对所述原始全景点云进行聚类,得到各元素点云,包括:
17.将所述原始全景点云进行二维聚类,得到各平面点云;
18.将所述各平面点云进行三维聚类,得到各元素点云。
19.可选的,所述各元素点云包括墙面、地面、顶面、各设备点云,所述将所述各平面点云进行三维聚类,得到各元素点云,包括:
20.根据建筑物的几何特征,将空间位置处于预设范围内、法向量属于一类的不同平面点云合并,分割出墙面点云、地面点云、顶面点云;
21.将除墙面点云、地面点云、顶面点云外的平面点云进行三维聚类,分割出各设备点云。
22.可选的,所述基于所述各元素数据建立由各元素模型组成的场景数据模型,包括:
23.基于所述墙面点云、地面点云、顶面点云、各设备点云的模型数据计算各元素模型角点位置;
24.根据角点的空间拓扑关系,对各角点进行连接,构建由墙面模型、地面模型、顶面模型、各设备模型组成的场景数据模型。
25.可选的,所述在场景数据模型中添加目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离,包括:
26.将所述目标设备模型放置于所述场景数据模型中;
27.计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离;
28.若所述实际距离符合预设安全距离判断规则,则所述实际距离属于安全距离,所述安全距离判断规则预先记录各元素模型的安全距离判断标准。
29.可选的,在所述计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离之后,还包括:
30.若所述实际距离不符合预设安全距离判断规则,则调整所述目标设备模型位置,并返回计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离的步骤,直至所述目标设备模型符合预设安全距离判断规则。
31.可选的,所述计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离,包括:
32.基于所述场景数据模型所处的坐标系,确定所述目标设备模型中心点坐标;
33.基于所述目标设备模型中心点坐标,确定所述目标设备模型的各方向向量;
34.分别沿所述目标设备模型的各方向向量构建射线;
35.选取所述距离小于预设阈值的点云拟合成所述元素模型对应的平面;
36.计算所述射线与每一平面的距离,得到至少一个检测距离,并选取所述至少一个检测距离中的最小值,得到所述元素模型的第一目标检测距离;
37.计算所述目标设备模型在所述射线方向的外表面到所述目标设备模型中心点的距离作为第二目标检测距离;
38.将所述第一目标检测距离与所述第二目标检测距离相减,得到所述目标设备模型与所述元素模型间的实际距离。
39.可选的,还包括:
40.若选取不到所述距离小于预设阈值的点云,则选取最接近所述方向向量射线的元素模型的平面计算检测距离。
41.一种安全距离检测装置,包括:
42.元素数据获取单元,用于获取待测场景的各元素数据;
43.场景数据模型建立单元,用于基于所述各元素数据建立由各元素模型组成的场景数据模型;
44.安全距离计算单元,用于在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离;
45.显示单元,用于对所述安全距离进行显示。
46.从上述的技术方案可以看出,本技术实施例提供的一种安全距离检测方法,通过获取待测场景的各元素数据并组成的场景数据模型,在场景数据模型中计算目标设备模型与各元素模型间的安全距离,相比于现有技术的需要多次现场拍照达到测量安全距离的目的,本方案通过数据模型计算安全距离,提高了测量安全距离的效率,进一步的提高了测量安全距离的准确率。
附图说明
47.图1为本技术实施例提供的一种安全距离检测方法流程图;
48.图2为本技术实施例提供的一种检查距离计算示意图;
49.图3为本技术实施例提供的一种模型制作示意图;
50.图4为本技术实施例提供的另一种安全距离检测方法流程图;
51.图5为本技术实施例提供的一种安全距离检测装置的结构示意图;
52.图6为本技术实施例提供的一种安全距离检测设备的硬件结构框图。
具体实施方式
53.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
54.图1为本技术实施例提供的一种安全距离检测方法流程图,该方法可以包括以下步骤:
55.步骤s100、获取待测场景的各元素数据。
56.具体的,可以通过具有扫描测量功能的电子设备获取待测场景的各元素数据,待测场景可以是配电房,示例如使用三维激光扫描仪采集获取配电房的各元素数据。
57.步骤s200、基于所述各元素数据建立由各元素模型组成的场景数据模型。
58.具体的,各元素模型可以是三维模型,场景数据模型可以是与待测场景对应的三维模型,可以基于各元素数据建立由各元素的三维模型组成待测场景的三维模型。
59.步骤s300、在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离。
60.具体的,预设目标设备模型可以是预先制作好的设备三维模型,可以将预先制作好的目标设备模型添加到场景数据模型中,并计算目标设备模型与各元素模型间的安全距离,示例如可以根据不同厂家、不同用途的开关柜、变压器、自动化终端等设备尺寸,制作相关设备的目标设备模型,并可以通过obj标准的3d模型文件格式存储。
61.步骤s400、对所述安全距离进行显示。
62.具体的,可以通过显示设备对安全距离进行显示,示例如通过电脑屏幕对安全距离进行显示,显示形式可以是通过数据形式或在场景数据模型中通过标尺的形式对安全距
离进行显示。
63.从上述的技术方案可以看出,本技术实施例提供的一种安全距离检测方法,可以通过获取待测场景的各元素数据并组成的场景数据模型,在场景数据模型中计算目标设备模型与各元素模型间的安全距离,相比于现有技术的需要多次现场拍照达到测量安全距离的目的,本方案通过数据模型计算安全距离,提高了测量安全距离的效率,进一步的提高了测量安全距离的准确率。
64.在本技术的一些实施例中,为了安全无接触的获取可能存在触电危险的待测场景中的元素数据,下面对步骤s100、获取待测场景的各元素数据的步骤进行介绍,具体过程可以包括以下步骤:
65.步骤s110、扫描获取所述待测场景的原始全景点云。
66.具体的,原始全景点云可以是待测场景的全景三维点云,示例如配电房的全景三维点云,可以利用三维激光扫描仪扫描获取待测场景的原始全景点云。
67.步骤s120、对所述原始全景点云进行聚类,得到各元素点云。
68.具体的,聚类方法可以是三维欧式聚类法,可以基于建筑主体结构,及内部各设备主要以平面为基本结构面的特性,对原始全景点云进行聚类,得到各元素点云。
69.进一步的可以采用人工神经网络,对聚类后的不同元素点云进行分类,判断每一元素点云的设备的类型,实现设备点云的分类。
70.步骤s130、将聚类后的所述各元素点云建模得到所述待测场景的各元素模型对应的元素数据。
71.具体的,如图2所示,建模可以利用revit建模软件(专为建筑信息模型构建的系列软件)对各元素点云进行建模,建模后在同一空间坐标系下,可以得到各元素模型对应的元素数据,示例如各元素模型的长、宽、高及各元素模型的间距。
72.在本技术的一些实施例中,对步骤s120、对所述原始全景点云进行聚类,得到各元素点云的过程进行介绍,具体过程可以包括:
73.步骤s121、将所述原始全景点云进行二维聚类,得到各平面点云。
74.具体的,可以包括以下步骤:
75.基于均匀网格对所述原始全景点云进行下采样,并计算均匀网格中每个点云的法向量,得到点云法线;
76.利用区域增长算法对各所述点云法线之间的角度进行比较,得到比较结果;
77.将所述比较结果满足平滑约束条件的相邻点云合并聚类,得到至少一个处于相同平面的点集;
78.利用ransac(random sample consensus随机抽样一致)平面拟合算法将所述至少一个点集拟合得到对应的平面点云。
79.在本技术的一些实施例中,考虑到元素模型的边缘位置可能聚类效果较差的情况,本方案还可以包括如下步骤:
80.确定各平面点云的交线位置;
81.基于所述交线位置提取各平面点云的平面参数;
82.利用所述平面参数调节所述ransac平面拟合算法并返回利用ransac平面拟合算法将所述至少一个点集拟合得到对应的平面点云的步骤。
83.以上是原始全景点云进行二维聚类的过程。
84.步骤s122、将所述各平面点云进行三维聚类,得到各元素点云。
85.具体的,各元素点云可以包括墙面、地面、顶面、各设备点云,可以将各平面点云进行三维聚类,得到各元素点云。
86.在本技术的一些实施例汇总,对步骤s122、将所述各平面点云进行三维聚类,得到各元素点云的过程进行介绍,具体可以包括以下步骤:
87.步骤s1221、根据建筑物的几何特征,将空间位置处于预设范围内、法向量属于一类的不同平面点云合并,分割出墙面点云、地面点云、顶面点云。
88.具体的,建筑物的几何特征可以是墙面、地面、顶面的几何特征,可以将空间位置接近并处于预设范围内的,法向量属于一类的不同平面点云合并,分割出墙面点云、地面点云、顶面点云。
89.步骤s1222、将除墙面点云、地面点云、顶面点云外的平面点云进行三维聚类,分割出各设备点云。
90.具体的,由于待测场景中的设备在空间中可以相互分离且附着在墙壁或地面上,在去除墙壁、地面、顶面后,设备点云在空间中可以相互独立,可以利用三维空间欧式聚类法,将各设备点云进行聚类分割,可以将除墙面点云、地面点云、顶面点云外的平面点云进行三维聚类,分割出各设备点云。
91.在本技术的一些实施例中,对步骤s200、基于所述各元素数据建立由各元素模型组成的场景数据模型的过程进行介绍,具体可以包括以下步骤:
92.步骤s210、基于所述墙面点云、地面点云、顶面点云、各设备点云的模型数据计算各元素模型角点位置。
93.具体的,可以根据模型数据中,点云拟合的平面方程,计算各元素模型的角点,可以基于墙面点云、地面点云、顶面点云、各设备点云的模型数据计算各元素模型角点位置。
94.步骤s220、根据角点的空间拓扑关系,对各角点进行连接,构建由墙面模型、地面模型、顶面模型、各设备模型组成的场景数据模型。
95.具体的,空间拓扑关系可以清楚的反应实体之间的逻辑结构关系,不需要利用坐标或距离,就可以确定一种空间实体相对于另一种空间实体的位置关系,可以根据角点的空间拓扑关系,对各角点进行连接,构建由墙面模型、地面模型、顶面模型、各设备模型组成的场景数据模型。
96.在本技术的一些实施例中,下面对步骤s300、在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离的过程进行介绍,具体过程可以包括以下步骤:
97.步骤s310、将所述目标设备模型放置于所述场景数据模型中。
98.具体的,所述场景数据模型中可以有各元素模型,可以在三维建模软件中,将目标设备模型从预设模型库中拖动放置于场景数据模型中。
99.步骤s320、计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离。
100.具体的,可以以目标设备模型为参照点,计算目标设备模型前后左右四个方向到周边场景数据模型中的各元素模型的实际距离。
101.步骤s330、若所述实际距离符合预设安全距离判断规则,则所述实际距离属于安全距离,所述安全距离判断规则预先记录各元素模型的安全距离判断标准。
102.具体的,安全距离判断规则可以预先记录各元素模型的安全距离判断标准,若实际距离符合预设安全距离判断规则,则实际距离属于安全距离。
103.示例如下表1所示,表1中列举了当目标设备模型放入场景数据模型中时,前后左右方向的实际距离属于安全距离的对应条件。
104.表1
[0105][0106]
在本技术的一些实施例中,考虑到实际距离可能存在不符合安全距离判断规则的情况,本方案还可以包括如下步骤:
[0107]
步骤s340、若所述实际距离不符合预设安全距离判断规则,则调整所述目标设备模型位置,并返回计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离的步骤,直至所述目标设备模型符合预设安全距离判断规则。
[0108]
具体的,当实际距离不符合预设安全距离判断规则时,可以根据需求调整目标设备模型的位置,计算调整后的目标设备模型与场景数据模型中的各元素模型间的实际距离的步骤,直至目标设备模型符合预设安全距离判断规则。
[0109]
在本技术的一些实施例中,对上述步骤s320、计算所述目标设备模型与所述场景数据模型中的各元素模型间的实际距离的过程进行介绍,具体可以包括如下步骤:
[0110]
步骤s321、基于所述场景数据模型所处的坐标系,确定所述目标设备模型中心点坐标。
[0111]
具体的,可以将目标设备模型的z轴与场景数据模型的z轴保持一致,获取目标设备模型中心点在场景数据模型所处的坐标系下的坐标,示例如中心点o(xo,yo,zo)。
[0112]
步骤s322、基于所述目标设备模型中心点坐标,确定所述目标设备模型的各方向向量。
[0113]
具体的,方向向量可以是前向n1、后向n2、左向n3、右向n4的方向向量,可以利用中心点坐标与x轴正向的夹角,分别确定目标设备模型的各方向向量,示例如设夹角为θ:
[0114]
n1={cosθ,sinθ,0}
[0115]
n2={-cosθ,-sinθ,0}
[0116]
n3={-sinθ,cosθ,0}
[0117]
n4={sinθ,-cosθ,0}
[0118]
步骤s323、分别沿所述目标设备模型的各方向向量构建射线。
[0119]
具体的,可以以目标设备模型的中心点为起点,分别沿前各方向向量构建射线,示例如以中心点o点为起点,分别沿前、后、左、右方向向量构造射线。
[0120]
步骤s324、选取所述距离小于预设阈值的点云拟合成所述元素模型对应的平面。
[0121]
具体的,可以搜索在射线周围的及预设阈值范围内的点云,并将预设阈值范围内的点云对应的点集拟合成射线周围的元素模型的对应的平面。
[0122]
步骤s325、计算所述射线与每一平面的距离,得到至少一个检测距离,并选取所述至少一个检测距离中的最小值,得到所述元素模型的第一目标检测距离。
[0123]
具体的,可以计算射线与每一平面的距离,得到至少一个检测距离,并选取至少一个检测距离中的最小值,得到元素模型的第一目标检测距离,示例如图2所示,图2为检查距离计算示意图,构造过中心点o(xo,yo,zo)的与前向n1垂直的平面a的方程:
[0124]
cos(x-xo)+sinθ(y-yo)=0
[0125]
计算点云中第i(1≤i≤总点数)点(xi,yi)到平面a的距离d:
[0126]
d=cosθ*xi+sinθ*y
i-(cosθ*xo+sinθ*yo)
[0127]
获取d》0的在预设范围m内的点集p,取p中的任一点pk(x
pk
,y
pk
),用下式求取pk至前向射线的距离s1:
[0128][0129]
取所有s1<m的点构成点集q,同时计算qj(x
qj
,y
qj
)至o点的第一目标检测距离s2[0130][0131]
步骤s326、计算所述目标设备模型在所述射线方向的外表面到所述目标设备模型中心点的距离作为第二目标检测距离。
[0132]
具体的,由于目标设备模型是预设模型,可以根据目标设备模型的设定数据直接计算目标设备模型在射线方向的外表面到目标设备模型中心点的距离作为第二目标检测距离。
[0133]
步骤s327、将所述第一目标检测距离与所述第二目标检测距离相减,得到所述目标设备模型与所述元素模型间的实际距离。
[0134]
具体的,可以将第一目标检测距离与第二目标检测距离相减,得到目标设备模型与元素模型间的实际距离,示例如用点集r拟合平面,设前向射线s1与拟合面的交点,中心o点与交点的第一目标检测距离s2,设目标设备模型中心o离目标设备模型的前表面的第二目标检测距离为a,则检测到的目标设备模型前表面到前方最近的元素模型的点云的实际距离s3为:
[0135]
s3=s
2-a
[0136]
同理可以推导目标设备模型后、左、右表面到后、左、右方最近物体点云的实际距离。
[0137]
在本技术的一些实施例中,考虑到可能存在选取不到距离小于预设阈值的点云的情况,本方案还可以包括如下步骤:
[0138]
步骤s328、若选取不到所述距离小于预设阈值的点云,则选取最接近所述方向向量射线的元素模型的平面计算检测距离。
[0139]
具体的,当选取不到所述距离小于预设阈值的点云时,可以选取最接近所述方向向量射线的元素模型的平面计算检测距离。
[0140]
在本技术的一些实施例中,为了方便理解本方案,本技术实施例提供了一种在获
取到场景数据模型后对本方案的应用场景,如图4所示:
[0141]
步骤s1、添加目标设备。
[0142]
步骤s2、对目标设备进行前、后、左、右距离检测,得到检测结果。
[0143]
步骤s3、判断检测结果是否满足安全距离规则要求。
[0144]
步骤s4、若是,则显示目标设备添加成功。
[0145]
步骤s5、若否,则调整目标设备位置并返回执行步骤s2、对目标设备进行前、后、左、右距离检测,得到检测结果。
[0146]
通过上述实施例可以方便快捷的确定各种电器设备在现实场景中的处于安全距离范围内的位置,相比于现有技术的需要多次现场拍照达到测量安全距离的目的,,提高了测量安全距离的效率,进一步的提高了测量安全距离的准确率。
[0147]
下面对本技术实施例提供的安全距离检测装置进行描述,下文描述的安全距离检测装置与上文描述的安全距离检测方法可相互对应参照。
[0148]
图5所示,其公开了一种安全距离检测装置的结构示意图,该安全距离检测装置可以包括:
[0149]
元素数据获取单元11,用于获取待测场景的各元素数据;
[0150]
场景数据模型建立单元12,用于基于所述各元素数据建立由各元素模型组成的场景数据模型;
[0151]
安全距离计算单元13,用于在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离;
[0152]
显示单元14,用于对所述安全距离进行显示。
[0153]
可选的,所述元素数据获取单元11,可以包括:
[0154]
第一元素数据获取子单元,用于扫描获取所述待测场景的原始全景点云;
[0155]
第二元素数据获取子单元,用于对所述原始全景点云进行聚类,得到各元素点云;
[0156]
第三元素数据获取子单元,用于将聚类后的所述各元素点云建模得到所述待测场景的各元素模型对应的元素数据。
[0157]
可选的,所述第二元素数据获取子单元,可以包括:
[0158]
二维聚类单元,用于将所述原始全景点云进行二维聚类,得到各平面点云;
[0159]
三维聚类单元,用于将所述各平面点云进行三维聚类,得到各元素点云。
[0160]
可选的,所述各元素点云包括墙面、地面、顶面、各设备点云,所述三维聚类单元,可以包括:
[0161]
建筑物聚类单元,用于根据建筑物的几何特征,将空间位置处于预设范围内、法向量属于一类的不同平面点云合并,分割出墙面点云、地面点云、顶面点云;
[0162]
设备聚类单元,用于将除墙面点云、地面点云、顶面点云外的平面点云进行三维聚类,分割出各设备点云。
[0163]
可选的,所述场景数据模型建立单元12,可以包括:
[0164]
角点计算单元,用于基于所述墙面点云、地面点云、顶面点云、各设备点云的模型数据计算各元素模型角点位置;
[0165]
模型构建单元,用于根据角点的空间拓扑关系,对各角点进行连接,构建由墙面模型、地面模型、顶面模型、各设备模型组成的场景数据模型。
memory)等,例如至少一个磁盘存储器;
[0186]
其中,存储器存储有程序,处理器可调用存储器存储的程序,所述程序用于:
[0187]
获取待测场景的各元素数据;
[0188]
基于所述各元素数据建立由各元素模型组成的场景数据模型;
[0189]
在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离;
[0190]
对所述安全距离进行显示。
[0191]
可选的,所述程序的细化功能和扩展功能可参照上文描述。
[0192]
本技术实施例还提供一种存储介质,该存储介质可存储有适于处理器执行的程序,所述程序用于:
[0193]
获取待测场景的各元素数据;
[0194]
基于所述各元素数据建立由各元素模型组成的场景数据模型;
[0195]
在场景数据模型中添加预设目标设备模型,并计算所述目标设备模型与各元素模型间的安全距离;
[0196]
对所述安全距离进行显示。
[0197]
可选的,所述程序的细化功能和扩展功能可参照上文描述。
[0198]
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0199]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间可以相互组合,且相同相似部分互相参见即可。
[0200]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本技术。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本技术的精神或范围的情况下,在其它实施例中实现。因此,本技术将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1