一种水下柔性回收机构形态与刚度调控方法
1.本发明涉及水下航行器技术领域,尤其涉及一种水下柔性回收机构形态与刚度调控方法。
背景技术:
2.自主式水下航行器是一种海洋移动观测平台,它无缆且不需要人为操作,能够自主航行进入海底观测网络无法布放的区域进行观测。然而,auv通常由蓄电池供电,因此携带的能源十分有限,无法长期持续性地进行水下观测。
3.auv水下回收技术是auv进行充电补给与信号反馈的关键技术。传统auv回收机构多是刚性机构,存在碰撞力大、易损坏刮伤auv的缺陷。例如,申请号为cn201911199091.5的中国专利文献公开了一种搭载于移动平台的auv动态回收机构,该机构虽然减少了传统装置的水阻力,但是依旧存在质量大、刚性碰撞等不足。柔性机构具备柔顺接触与回收auv的优势,且质量轻盈、便于在移动或固定平台搭载使用。例如,申请号为cn201911145320.5的中国专利文献公开了一种水陆两栖的仿生软体臂,通过含圆柱形流道的扇形单元进行拼接来改变软体臂的长度,通过对不同流道通入高压流体,软体臂能够完成伸展、弯曲运动。
4.但在auv对接过程中,不合理的机构形态会增加auv的碰撞次数,而不合理的刚度会使机构对auv产生过度碰撞力或回弹力。因此,水下柔性机构形态与刚度的协同作用是auv能否成功回收的关键因素。通过研究接驳机构形态与刚度的调控策略,探究两者对auv回收过程的影响机制,能够为控制柔性回收机构奠定重要理论基础。
5.目前,柔性臂动力学模型中的惯性、弹性等系数一般是通过经验公式估算而来,与实际物理模型存在一定偏差,因而不基于模型的开环经验控制方法成为柔性臂目前的主要控制方法。
6.然而要分析柔性机构的最佳形态与刚度,必须要获得准确的动力学模型,因此需要研究一种水下柔性臂动力学模型参数辨识方法。admas仿真软件能够分析auv与刚性回收机构的碰撞问题,但对复合型软体机构以及物体的水动力特性难以进行描述,因此需要研究相应的仿真方法来分析复合型软体碰撞问题,从而确定柔性回收机构的最佳形态与刚度。
技术实现要素:
7.本发明提供了一种水下柔性回收机构形态与刚度调控方法,通过该方法可以确定水下柔性回收机构的最佳形态与刚度。
8.本发明的技术方案如下:一种水下柔性回收机构形态与刚度调控方法,包括:(1)构建水下柔性回收机构的动力学数学模型,通过粒子群优化算法进行模型参数辨识,得到修正后的水下柔性回收机构的动力学模型;(2)将auv和水下柔性回收机构的动力学模型导入matlab软件;将auv和水下柔性
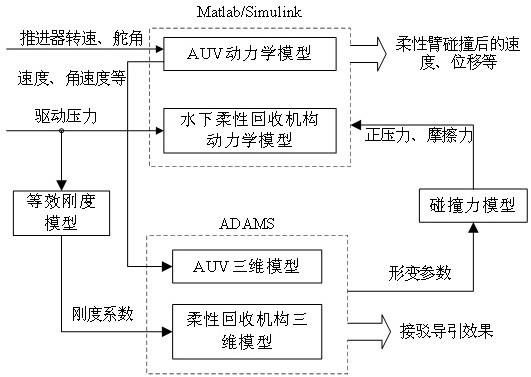
回收机构的三维物理模型导入adams软件;建立matlab软件与adams软件的联合仿真接口;(3)将auv的运动参数以及水下柔性回收机构的刚度特性导入adams软件中,对auv和水下柔性回收机构的碰撞进行仿真,获得水下柔性回收机构对auv的接驳导引效果和水下柔性回收机构的形变参数;将所述的形变参数输入碰撞力模型得到水下柔性回收机构的受力信息;(4)将auv的运动参数、水下柔性回收机构的驱动压力以及步骤(2)中获得的形变及受力信息导入matlab软件,对auv和水下柔性回收机构的碰撞进行仿真,获得水下柔性回收机构柔性臂在碰撞后的速度和位移信息;(5)基于matlab软件和adams软件的仿真结果对auv和水下柔性回收机构的碰撞过程进行分析,依据碰撞情况及回收成功率确定水下柔性回收机构柔性臂的最佳形态和刚度参数,形成水下柔性回收机构柔性臂形态和刚度的控制策略;(6)将水下柔性回收机构柔性臂形态和刚度的控制策略转换成对应阶段的柔性臂的目标驱动压力,基于柔性臂当前的压力、位姿信息以及目标驱动压力与位姿,调整柔性臂各腔的输入压力,完成指定动作形态。
9.水下柔性回收机构的形态与刚度是决定其能否成功回收自主式水下航行器(auv)的关键因素。本发明基于水下柔性回收机构,提出一种水下柔性回收机构的形态与刚度调控方法,该方法主要包括水下柔性回收机构动力学模型参数辨识,通过matlab-admas联合仿真分析auv回收碰撞过程,提出一种水下柔性回收机构的动态控制策略。
10.所述的水下柔性回收机构包括本体和驱动系统;所述的本体包括通流平板和至少三个柔性臂;所述的柔性臂呈圆周等间距分布在所述的通流平板上;所述的柔性臂为圆柱形,由柔性材料制作而成,其内部含有若干个圆柱形的通流空腔;所述的通流空腔的一端封闭,另一端开口;通过液压驱动控制各个通流空腔内的压力,以实现柔性臂的伸缩、弯曲、扭转以及变刚度功能;所述的柔性臂末端设有光学标记点及姿态传感器,所述的通流空腔进口设有压力传感器;所示的驱动系统包括电机、水泵、比例阀组、控制电路以及流体管路;通过控制电路控制电机驱动水泵及比例阀组来调节各个通流空腔内的压力。
11.步骤(1)中,采用不同的驱动压力驱动水下柔性回收机构,在水下柔性回收机构形态变化过程中,采用运动捕捉系统来识别所述的光学标记点,解算柔性臂末端的位移和速度;采用所述的姿态传感器记录柔性臂末端的角度和角速度;采用所述的压力传感器采集柔性臂的通流空腔的压力数据;将运动捕捉系统、姿态传感器及压力传感器采集的数据及其对应的时间戳输入计算机,通过粒子群优化算法对水下柔性回收机构的动力学数学模型进行模型参数辨识。
12.优选的,所述的运动捕捉系统为optitrack系统。
13.步骤(3)中,水下柔性回收机构的刚度特性为刚度系数;将水下柔性回收机构的驱动压力输入等效刚度模型获得所述的刚度系数。
14.步骤(3)中,所述的碰撞力模型采用库伦摩擦力作为auv与水下柔性回收机构的摩擦力;以非线性阻尼模型来描述接触正压力。
15.通过步骤(2)-(4)的matlab-adams的联合仿真,在matlab中得到柔性回收机构在碰撞后的速度、位移信息,在adams中观察到auv对接的动态过程,并获得物体的形变与受力
信息。
16.步骤(5)中,依据碰撞情况和回收成功率,以碰撞力最小、回收成功率最高的情况下确定水下柔性回收机构最佳形态与刚度参数,形成柔性臂的形态与刚度控制策略。
17.优选的,本发明的水下柔性回收机构形态与刚度调控方法还包括在高压模拟环境下对水下柔性回收机构的控制性能进行测试,测试方法包括:将水下柔性回收机构通过耐压固定在高压舱内,通过加压泵对高压舱进行加压注水来模拟水下高压环境;通过高压舱外上位机控制系统对水下柔性回收机构的柔性臂各个通流空腔的压力进行调节;通过摄像头上位机监控画面判断水下柔性回收机构的动作形态,并基于水下柔性回收机构的传感器反馈信息调节控制参数,从而使水下柔性回收机构达到预期的形态与刚度。
18.与现有技术相比,本发明的有益效果为:(1)本发明的水下柔性回收机构的联合仿真分析方法解决了复合构型软体无法在admas软件中进行碰撞、分析的不足,可以为不同工况下的auv对接过程提供关键参数(最佳形态、刚度),为水下柔性臂的致动提供控制目标;(2)水下柔性回收机构的模型参数辨识方法提供了精确的水下柔性回收机构的物理模型,为精确分析水下柔性臂运动学和动力学特性奠定理论基础;(3)本发明提出的水下柔性回收机构的高压舱测试方法,可以模拟实际深海工况,并且有效监测柔性臂的致动情况,为优化水下柔性臂(回收机构)在深海环境下的控制策略提供了可靠、经济的试验方法。
附图说明
19.图1是水下柔性回收机构的结构示意图;图2是水下柔性臂模型参数辨识方法示意图;图3是水下柔性回收机构与auv碰撞过程联合仿真方法示意图;图4是水下柔性臂的控制方法示意图;图5是水下柔性回收机构高压舱性能测试方案示意图。
具体实施方式
20.下面结合附图和实施例对本发明作进一步详细描述,需要指出的是,以下所述实施例旨在便于对本发明的理解,而对其不起任何限定作用。
21.如图1所示,一种利用硅橡胶制作的水下柔性回收机构,用于auv柔性回收,水下柔性回收机构具有六个呈圆周排布的柔性臂1,每个柔性臂安装于通流平板2上,呈60
°
等间距分布;每个水下柔性臂内有若干独立的圆柱形通流空腔,通过液压驱动每个通流空腔可实现柔性臂的伸缩、弯曲与扭转功能;柔性臂的末端安装有光学标记点、姿态传感器,每个通流空腔流道进口安装有压力传感器。
22.如图2所示,使用商业运动捕捉系统optitrack来识别柔性回收机构末端光学标记点,解算柔性臂的位移和速度等运动参数,并利用柔性驱动器的末端位置安装姿态传感器,记录水下柔性回收机构形态变化过程中的角度、角速度等数据,同时记录水下柔性回收机构动作过程的压力数据;
将上述记录的数据及其对应的时间戳输入计算机中,通过粒子群优化算法进行模型参数辨识,从而得到修正后的模型参数。通过变化柔性驱动器的驱动压力(使用与参数辨识数据中不同的压力),记录柔性驱动器的运动输出数据,并与动力学模型的理论输出数据进行对比,判断动力学模型参数辨识结果是否在设定误差范围内;若误差不满足要求,则延长粒子群算法的迭代步数,并增加粒子数量,直至误差满足要求。
23.基于上述方法,可获得水下柔性回收机构的动力学模型。如图3所示,在matlab软件中导入auv与水下柔性回收机构的动力学数学模型以及建立与adams的联合仿真接口,在adams软件中导入两者的三维物理模型,将auv运动参数以及接驳机构的刚度特性导入adams仿真软件中,把adams中碰撞形变等相关信息通过碰撞力模型导入matlab中,采用库伦摩擦力作为二者的摩擦力,以非线性阻尼模型来描述接触正压力;通过上述方法,可在matlab中得到柔性回收机构在碰撞后的速度、位移信息,在adams中观察到auv对接的动态过程,并获得物体的形变与受力信息;基于上述结果,进行水下柔性回收机构交互碰撞过程分析,依据碰撞情况以及回收成功率(碰撞力最小、回收成功率最高的情况)确定柔性机构最佳的形态与刚度参数,形成柔性驱动器刚度与形态控制策略;如图4所示,将相应的控制策略转换成对应阶段(包括水下柔性回收机构伸展、导引、锁紧阶段)的控制压力,即目标控制压力,并基于柔性臂的压力、位姿传感器信息以及目标压力与位姿,在下位机控制单元调节pid(比例-积分-微分)控制器参数,将传感器信号转化成对电机(转速)与比例阀(流量)的控制信号,从而调整柔性臂各腔的输入压力,完成指定动作形态。
24.如图5所示,将水下柔性回收机构固定在高压试验舱内进行性能测试,高压试验舱含三个外部接口,分别是与高压舱加压泵连通的流体管接头、与水下摄像机连接的模拟量水密接插件接口,以及给柔性回收机构供电和通讯的信/电复合水密接插件接口;水下柔性回收机构其驱动系统(电机、泵、比例阀组、控制电路以及流体管路)通过耐压腔体进行封装,耐压腔体包含四个外部接口,分别是与高压舱电能/信号水密缆相连的水密件接插接口,驱动柔性回收机构的多路复合流体管接头,柔性回收机构的传感器反馈信号与供电水密接插件,以及从高压舱内抽取高压流体的管接头;通过加压泵对将高压舱进行加压来模拟水下高压环境,通过高压舱外上位机控制系统进行柔性臂空腔压力调节,通过摄像头上位机监控画面判断是柔性回收机构的动作形态,并基于柔性回收机构的传感器反馈信息调节控制参数,从而使柔性回收机构达到预期的形态与刚度。
25.以上所述的实施例对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的具体实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1