一种飞行器表面的气动热环境智能预测方法与流程
1.本发明属于飞行器气动热预测技术领域,具体涉及一种飞行器表面的气动热环境智能预测方法。
背景技术:
2.高超声速飞行器在大气层内飞行时,周围空气与飞行器表面产生剧烈摩擦作用,此时,飞行器的大部分动能会快速转化为热能,使空气温度急剧上升,高温空气与飞行器表面产生的巨大温差会使得部分热能通过边界层传递到飞行器表面,这种现象称为气动加热,即气动热。影响气动热的主要因素包括飞行器形状、飞行参数和飞行器表面材料特性。飞行器形状将影响绕飞行器的激波形态和流动特性;飞行参数包括飞行速度、飞行高度、飞行姿态等,这些参数的变化会导致气动热环境的剧烈变化;飞行器表面材料对高温边界层内化学反应的催化特性不同,将对气动热产生较大影响。由于影响气动热的因素众多且较为复杂,因此气动热的预测相对比较困难,通常采用数值模拟方法或者风洞试验方法进行模拟和试验。风洞试验无法模拟所有参数条件和外形,因此在高超声速飞行器设计初期,需要进行大量的气动热数值模拟。
3.气动热数值模拟首先需要对飞行器外形进行表面和空间网格划分,之后进行复杂的方程求解。网格生成和方程求解过程耗时较长,从而导致一次数值模拟过程时间消耗较大。在快速选型阶段,需要计算多种飞行器外形在不同的飞行条件下的表面热环境,完成外形筛选,保留气动热环境符合条件的飞行器外形。该过程只需要知道大致的气动热环境分布状况即可,无需精确计算。然而,目前并没有预测气动热环境的快速手段,只能进行工程化计算或者cfd数值计算,这会增加快速选型阶段的时间,延长飞行器设计周期。因此,发展一种高效的气动热环境智能预测方法十分必要。
4.专利cn110033038a公开了一种气动热试验数据的智能选取算法,专利cn112214834a公开了一种轴对称飞行器气动数据库建立方法,但上述两个专利均停留在数据库构建阶段,未涉及到气动热环境预测技术。cn107273593a公开了一种用于高马赫数强激波流场气动热预测的湍流模型及建立方法;专利cn111931295a公开了一种全弹道整体迭代的气动热、传热耦合计算方法。专利cn104133933a公开了一种气动弹性分析方法,提供了一种高超声速飞行器热环境下气动弹性力学特性分析方法。专利cn106126791b公开了一种考虑几何不确定性的高超声速机翼气动力/热分析方法。上述方法均通过求解方程的方法获得气动热结果,目前尚无公开发明专利采用人工智能技术预测飞行器表面气动热环境。
技术实现要素:
5.为了解决现有技术存在的上述问题,本发明的目的在于提供一种高效精确地进行飞行器表面气动热环境预测的方法。
6.本发明所采用的技术方案为:一种飞行器表面的气动热环境智能预测方法,包括
s1:构建多外形多条件气动热数据库;s2:提取飞行器外形全局特征;s3:提取飞行器局部区域特征;s4:将飞行条件参数化;s5:融合邻域特性的气动热智能预测模型;s6:进行飞行器表面气动热智能预测模型测试。
7.作为本发明的优选方案,步骤s1具体包括以下步骤:s11:针对球头、钝锥、钝双锥、双椭球、升力体、航天飞机等6大类不同飞行器三维数模外形,在飞行高度为20km、30km、35km、40km、45km、50km、60km,马赫数范围为5、10、15、20,攻角范围为0
°
、2.5
°
、 5
°
、7.5
°
、10
°
、12.5
°
、15
°
、17.5
°
、20
°
,分别进行数值模拟计算获得飞行器表面热流场;s12:在任意飞行器i的表面进行随机投点采样,获得覆盖飞行器表面的n个点的空间坐标值(x
1i
,y
1i
,z
1i
)~ (x
ni
,y
ni
,z
ni
),通过步骤s11获得飞行器i在飞行条件j下的热流场分布q
ij
;之后对热流场qij进行插值计算,得到n个点对应的热流值q
1ij
~q
nij
;针对步骤s11中得到的所有飞行器外形和热流场q
ij
进行投点和插值操作,形成气动热数据库。
8.作为本发明的优选方案,步骤s2具体包括以下步骤:s21:基于点云数据的飞行器全局特征提取:步骤s12中获得了覆盖飞行器表面的n个点的坐标,使用这n个点作为输入,通过自动编码器编码到64维的特征向量d1,再解码到与输入大小相同的输出向量,通过最小化输出与输入之间的重构误差训练自动编码器;训练完成后,将向量d1视为飞行器表面的特征向量;s22:基于投影的飞行器全局特征提取:对飞行器的三维数模外形分别在x-y、y-z和x-z平面进行投影,获得3个投影平面的二维飞行器外形,通过二维自动编码器抽取飞行器的投影特征d2,d2维度为64;s23:将步骤s21获得的向量d1和步骤s22获得的向量d2拼接得到飞行器外形全局特征向量dg,向量维度为128维。
9.作为本发明的优选方案,步骤s3具体包括以下步骤:s31:对步骤s12中产生的n个点,计算任意两个点之间的距离,并获得离每个点最近的3个邻居点的坐标,形成n个点的邻居列表l,l中每一项是一个3*3的矩阵,第一个3表示3个邻居点,第二个3表示x,y,z三个坐标值;s32:使用步骤s31中得到的邻居列表l,计算每个点的邻居坐标协方差矩阵,之后计算协方差矩阵的特征值和特征向量,并使用最小特征值对应的特征向量作为法向量,最终获得所有点处的法向量;s33:使用步骤s31中得到的邻居列表l和步骤s32中获得的所有点法向量,得到n个点的邻居点的法向量列表,计算每个点的法向量与其3个邻居点的法向量之间的夹角;s34:计算n个点处的表面曲率、主曲率、高斯曲率和平均曲率;s35:对所有点计算步骤s32获得的法向量与飞行攻角之间的夹角,并依据夹角判断各个点处于迎风区还是背风区,当点的法向量与攻角方向的夹角在0~90
°
之间,说明该点处于迎风区,当夹角为钝角时,说明该点处于背风区;s36:对每个表面点,将步骤s12中得到的三维点坐标、步骤s32中得到的三维法向
量、步骤s33中得到的三维法向量夹角、步骤s34中得到的4个四维曲率、步骤s35中得到的一维夹角以及一维迎风背风区归属,共6个步骤的输出向量拼接成一个长度为15的向量;s37:对所有外形的所有表面点,均采用步骤s31~s36产生100*n个15维向量,并使用这些数据训练一个自动编码器,自动编码器输入长度为15,包含编码器和解码器,编码器输出为128,解码器输入为编码器输出,解码器输出长度与编码器输入长度相同,均为15,通过最小化解码器输出与自动编码器输入的重构误差训练自动编码器;训练完成后,抛弃解码器,使用编码器输出的128维向量d
l
代表表面点的局部特征。
10.作为本发明的优选方案,步骤s4的具体步骤为:将步骤s11中的飞行条件进行参数化,得到128维的特征向量:首先通过飞行高度获得该高度处空气密度、空气温度、压强3个值,然后将飞行高度、密度、温度、压强、马赫数、攻角6个值通过自动编码器的编码器编码成128维的特征向量。
11.作为本发明的优选方案,步骤s5具体包括以下步骤:s51:融合邻域特性的气动热智能预测模型及代价函数设计;s52:融合邻域信息的预测值微调网络。
12.作为本发明的优选方案,步骤s51的具体步骤为:将步骤s23、步骤s37和步骤s4获得的向量拼接,得到长度为384维的输入向量,将步骤s1中使用数值方法得到的每个点处的热流值作为指导标签;构建深度神经网络开展模型训练,神经网络通过构造代价函数指导训练过程;在深度神经网络的代价函数中增加邻居信息,代价函数为:(1);公式(1)中,q指当前点的真实热流值,q’指通过深度神经网络预测的该点的热流值,代价函数第一项表示要不断调整网络参数以最小化预测热流和数值模拟结果;第二项中q
i’表示当前点的第i个邻居点通过神经网络预测的热流值,di表示当前点与第i个邻居点之间的距离,l表示当前点共有l个邻居点;使用公式(1)作为代价函数调整网络参数,直到训练误差下降到指定阈值后固定网络参数,得到智能预测模型m1。
13.作为本发明的优选方案,步骤s52的具体步骤为:将飞行器表面所有点均使用步骤s51获得的网络m1后,获得所有点的预测热流值;计算每个点的k个邻居节点,设计一个新的网络m2,并将公式(2)作为神经网络的输入,用真实q值做标签指导m2的训练;(2);公式(2)中q1’
表示m1模型预测的当前点第1个邻居点后的热流值,q
k’表示m1模型预测的当前点第k个邻居点的热流值,q’表示m1模型预测的当前点的热流值;d1、d2、dk分别表示当前点与第1个邻居点、第2个邻居点和第k个邻居点的距离。
14.作为本发明的优选方案,步骤s5的具体步骤为:
给定测试飞行器以及测试飞行条件,首先得到覆盖飞行器表面的t个点的坐标;使用步骤s2获得测试飞行器的全局特征向量,对每个点使用步骤s3描述的方法获得测试飞行器的局部特征向量,使用步骤s4获得给定测试飞行条件的参数化向量,将3个特征向量拼接得到t个长度为384维的向量;将t个向量逐个输入到步骤s5训练得到的智能预测模型m1中,得到t个热流预测值;计算每个点与k个邻居点的距离,并将m1预测得到的各点的热流值和k个邻居点的热流值按照步骤s52的输入方式输入值训练好的模型m2中,得到各个点的最终预测热流值。
15.本发明的有益效果为:本发明提出了全局、局部特征提取方法和飞行条件参数化方法,提出了融合气动热邻域相似特性的智能预测模型代价函数,不需要生成网格并进行迭代方程求解。本发明获得热流值的时间较短,与传统方法相比加速比能够达到数百倍。本发明结合了飞行器的全局特征和表面点位置的局部特征,充分考虑了外形的全局特性和局部变化,同时结合了邻域相似性,能够获得较高的精度。
附图说明
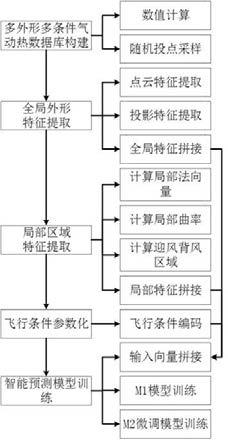
16.图1是智能预测模型训练流程图;图2是气动热环境智能预测模型测试流程图。
具体实施方式
17.下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
18.如图1和图2所示,本实施例的飞行器表面的气动热环境智能预测方法,包括如下步骤:s1:多外形多条件气动热数据库构建。
19.s11:针对球头、钝锥、钝双锥、双椭球、升力体、航天飞机等6大类不同飞行器三维数模外形,在飞行高度为{20千米,30千米,35千米,40千米,45千米,50千米,60千米},马赫数范围为{5,10,15,20},攻角范围为{0
°
,2.5
°
, 5
°
, 7.5
°
, 10
°
, 12.5
°
, 15
°
, 17.5
°
, 20
°
},分别进行数值模拟计算获得飞行器表面热流场。假设第i类外形在第j种飞行条件下获得的热流场为qij。i的取值为{1,2,
…
,100},其中1-10代表半径不同的球头外形,11~20代表后缘角不同的钝锥外形,21-30代表外形参数不同的钝双锥,31~40代表外形参数不同的双椭球,41-50代表外形参数不同的升力体,51~60代表外形参数不同的航天飞机,j表示252种不同飞行高度、马赫数和攻角的组合。数值模拟后共产生25200组数据。
20.s12:在任意飞行器i的表面进行随机投点采样,获得覆盖飞行器表面的n个点的空间坐标值{(x
1i
,y
1i
,z
1i
), (x
2i
,y
2i
,z
2i
),
……
, (x
ni
,y
ni
,z
ni
)},通过步骤s11获得飞行器i在飞行条件j下的热流场分布q
ij
。之后对热流场q
ij
进行插值计算,得到n个点对应的热流值{q
1ij
, q
2ij
,
……
, q
nij }。针对步骤s11中得到的所有飞行器外形和热流场q
ij
进行投点和插值操作,形成气动热数据库。
21.s2:飞行器外形全局特征提取。
22.s21:基于点云数据的飞行器全局特征提取。步骤s12中获得了覆盖飞行器表面的n
个点的坐标,使用这n个点作为输入,通过自动编码器编码到64维的特征向量d1,再解码到与输入大小相同的输出向量,通过最小化输出与输入之间的重构误差训练自动编码器。训练完成后,d1可以看做将n个点的坐标压缩后的向量,即使用d1就可以代表n个点的坐标,由于n个点基本覆盖了飞行器表面,所以向量d1可以认为是飞行器表面的特征向量。
23.s22:基于投影的飞行器全局特征提取。对飞行器的三维数模外形分别在x-y, y-z和x-z平面进行投影,获得3个投影平面的二维飞行器外形,通过二维自动编码器抽取飞行器的投影特征d2,d2维度为64。该步骤中,投影平面不限于这3个平面,可以任意给定投影平面,并计算投影后的飞行器图像,同时投影数量也不限于3个,可以为1个到任意多个平面。
24.s23:将步骤s21获得的向量d1和步骤s22获得的向量d2拼接得到飞行器外形全局特征向量dg,向量维度为128维。
25.s3:飞行器局部区域特征提取。
26.s31:对步骤s12中产生的n个点,计算任意两个点之间的距离,并获得离每个点最近的3个邻居点的坐标,形成n个点的邻居列表l,l中每一项是一个3*3的矩阵,第一个3表示3个邻居点,第二个3表示x,y,z三个坐标值。
27.s32:使用步骤s31中得到的邻居列表l,计算每个点的邻居坐标协方差矩阵,之后计算协方差矩阵的特征值和特征向量,并使用最小特征值对应的特征向量作为法向量,最终获得所有点处的法向量。
28.s33:使用步骤s31中得到的邻居列表l和步骤s32中获得的所有点法向量,得到n个点的邻居点的法向量列表,计算每个点的法向量与其3个邻居点的法向量之间的夹角。
29.s34:计算n个点处的表面曲率、主曲率、高斯曲率和平均曲率。
30.s35:对所有点计算步骤s32获得的法向量与飞行攻角之间的夹角,并依据夹角判断各个点处于迎风区还是背风区,当点的法向量与攻角方向的夹角在0~90
°
之间,说明该点处于迎风区,当夹角为钝角时,说明该点处于背风区。
31.s36:对每个表面点,将步骤s12中得到的点坐标(3维)、步骤s32中得到的法向量(3维)、步骤s33中得到的法向量夹角(3维)、步骤s34中得到的4个曲率(4维)、步骤s35中得到的夹角(1维)以及迎风背风区归属(1维),共6个步骤的输出向量拼接成一个长度为15的向量。n个表面点共获得n个15维向量。
32.s37:对所有外形的所有表面点,均采用步骤s31~s36产生100*n个15维向量,并使用这些数据训练一个自动编码器,自动编码器输入长度为15,包含编码器和解码器,编码器输出为128,解码器输入为编码器输出,解码器输出长度与编码器输入长度相同,均为15,通过最小化解码器输出与自动编码器输入的重构误差训练自动编码器。训练完成后,抛弃解码器,使用编码器输出的128维向量dl代表表面点的局部特征。
33.s4:飞行条件参数化。
34.将步骤s11中的飞行条件(飞行高度、马赫数、攻角)进行参数化,得到128维的特征向量。首先通过飞行高度获得该高度处空气密度、空气温度、压强3个值,然后将飞行高度、密度、温度、压强、马赫数、攻角6个值通过自动编码器的编码器编码成128维的特征向量。
35.s5:融合邻域特性的气动热智能预测模型。
36.s51:融合邻域特性的气动热智能预测模型及代价函数设计将步骤s23、步骤s37和步骤s4获得的向量拼接,得到长度为384维的输入向量,将
步骤s1中使用数值方法得到的每个点处的热流值作为指导标签。构建深度神经网络开展模型训练,神经网络通过构造代价函数指导训练过程。考虑到飞行器表面特定点的热流与邻居点的热流存在相似性,且这种相似性与距离成反比,即特定点与邻居点的距离越大,相似性越小,因此在深度神经网络的代价函数中增加了邻居信息。代价函数如公式(1)所示。所述神经网络模型的损失函数为公式(1)。
37.(1);公式(1)中,q指当前点的真实热流值(步骤s1中得到的数值模拟结果),q’指通过深度神经网络预测的该点的热流值,代价函数第一项表示要不断调整网络参数以最小化预测热流和数值模拟结果。第二项中q
i’表示当前点的第i个邻居点通过神经网络预测的热流值,di表示当前点与第i个邻居点之间的距离,l表示当前点共有l个邻居点。使用公式(1)作为代价函数调整网络参数,直到训练误差下降到指定阈值后固定网络参数,得到智能预测模型m1,m1预测的热流值不仅能够保证与数值模拟结果相似,还能够保持数值结果中的邻域相似特性。
38.s52:融合邻域信息的预测值微调网络将飞行器表面所有点均使用步骤s51获得的网络m1后,获得所有点的预测热流值。为进一步融合邻域信息,计算每个点的k个邻居节点,设计一个新的网络m2,并将公式(2)作为神经网络的输入,用真实q值做标签指导m2的训练。
39.(2);公式(2)中q1’
表示m1模型预测的当前点第1个邻居点后的热流值,q
k’表示m1模型预测的当前点第k个邻居点的热流值,q’表示m1模型预测的当前点的热流值。d1、d2、dk分别表示当前点与第1个邻居点、第2个邻居点和第k个邻居点的距离。
40.s6:飞行器表面气动热智能预测模型测试。
41.给定测试飞行器以及测试飞行条件,首先得到覆盖飞行器表面的t个点(t与n可以不相同)的坐标。使用步骤s2获得测试飞行器的全局特征向量,对每个点使用步骤s3描述的方法获得测试飞行器的局部特征向量,使用步骤s4获得给定测试飞行条件的参数化向量,将3个特征向量拼接得到t个长度为384维的向量。将t个向量逐个输入到步骤s5训练得到的智能预测模型m1中,得到t个热流预测值。计算每个点与k个邻居点的距离,并将m1预测得到的各点的热流值和k个邻居点的热流值按照步骤s52的输入方式输入值训练好的模型m2中,得到各个点的最终预测热流值。
42.已有方法使用方程求解法获得热流值,需要生成网格并进行迭代方程求解,耗时较长,效率较低,本发明获得热流值的时间较短,与传统方法相比加速比能够达到数百倍。本发明结合了飞行器的全局特征和表面点位置的局部特征,充分考虑了外形的全局特性和局部变化,同时结合了邻域相似性,能够获得较高的精度。
43.本发明不局限于上述可选实施方式,任何人在本发明的启示下都可得出其他各种
形式的产品,但不论在其形状或结构上作任何变化,凡是落入本发明权利要求界定范围内的技术方案,均落在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1