一种基于AI技术的仪器仪表识别方法与流程
一种基于ai技术的仪器仪表识别方法
技术领域
1.本公开涉及信息化数据采集技术领域,尤其涉及一种基于ai技术的仪器仪表识别方法。
背景技术:
2.在研究材料的重点实验室中,使用大型仪器仪表完成材料的合成和化学反应等是经常发生的。使用大型设备如:复合型真空计等。实验过程中进行的数据采集都需要人工进行值守记录化学反应数据,通过人工值守抄录的方式进行。
3.常见的数据记录方式是,首先制定记录规则,包含记录周期、记录仪器仪表、记录点位。然后根据记录规则,制定记录计划表,人工按照计划表定时到指定位置,抄录指定仪器仪表的读数。电子式仪表数据,人工抄录led显示读数。
4.这种数据记录方式及时性、记录数据的准确性无法完全保证,并且,这种数据记录方式操作周期长、操作人员劳动强度大。
技术实现要素:
5.本公开提供一种基于ai技术的仪器仪表识别方法,解决了现有技术中实验室仪器仪表数据记录困难、准确性差的技术问题。
6.解决上述技术问题采用的一些实施方案包括:
7.一种基于ai技术的仪器仪表识别方法,包括以下步骤:
8.获取识别区域,所述识别区域包括仪器仪表的示数数据以及位于所述示数数据周围的边框,所述边框为长方形;
9.获取中间数据,依次对识别区域进行灰度化、腐蚀、膨胀得到中间数据;
10.获取识别数据,根据所述边框对所述中间数据进行倾斜校正得到识别数据;
11.获取示数信息,识别所述识别数据中的示数数据得到示数信息;
12.输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域。
13.本方案通过获取识别区域,识别区域包括示数数据以及边框,边框限定识别区域的面积,并使示数数据位于边框以内。限定识别区域可以避免识别区域以外的信息干扰示数数据的识别。降低了示数数据识别过程中的运算压力,并且,提高了示数数据识别效率。
14.通过获取中间数据,中间数据主要是用于对识别区域进行相应处理,去掉识别区域中的噪声,提高示数数据识别精度。同时,识别数据对中间数据进行进一步修正,进一步提高了示数数据的识别精度。
15.在实际应用过程中,不需要操作人员亲至现场,不需要手工记录,提高了数据记录精度、提高了数据记录效率,并且,降低了操作人员的劳动强度。
16.作为优选,所述获取识别区域包括:
17.获取包含有识别区域的视频;
18.抽取所述视频中至少三帧图像得到识别图像;
19.抽取每帧所述识别图像中的识别区域,并删除每帧所述识别图像中所述识别区域以外的区域得到至少三个前置识别区;
20.根据所述边框叠加至少三个前置识别区得到所述识别区域。
21.本方案通过在视频中取帧的方式获取前置识别区,并对前置识别区处理后形成识别区域,不需要专业视频获取设备,常规的视频获取设备即可满足需求,降低了识别方法的应用成本。
22.作为优选,所述获取识别区域包括:
23.获取识别区域的视频;
24.抽取所述视频中至少三帧图像得到识别图像;
25.根据所述边框叠加所述识别图像得到所述识别区域。
26.本方案直接获取识别区域的视频,从硬件上直接获取识别区域视频,不需要对由视频获取的识别图像进行裁剪处理,降低了硬件的运行压力,提升了示数信息的识别效率。
27.作为优选,所述获取识别区域包括:
28.获取至少三张包含所述识别区域的图像得到识别图像;
29.删除每张所述识别图像中所述识别区域以外的区域得到至少三个前置识别区;
30.根据所述边框叠加至少三个前置识别区得到所述识别区域。
31.本方案通过图片的形成获得前置识别区,不需要由视频中取帧,提高了识别区域的获取效率。
32.作为优选,所述获取识别区域包括:
33.获取至少三张识别区域的图像得到识别图像;
34.根据所述边框叠加至少三个识别图像得到所述识别区域。
35.本方案不需要对识别图像进行裁剪,进一步提升了识别区域的获取效率。
36.作为优选,所述获取识别数据,根据所述边框对所述中间数据进行倾斜校正得到识别数据包括:
37.预置第一虚拟轴;
38.预置第二虚拟轴,所述第一虚拟轴与所述第二虚拟轴垂直,所述第一虚拟轴与所述第二虚拟轴相交于虚拟原点;
39.获取所述边框的中点;
40.获取所述边框的长边中点,两个所述长边中点的连线过所述中点;
41.获取所述边框的短边中点,两个所述短边中点的连线过所述中点;
42.使所述中点与所述虚拟原点重合,并使所述长边中点在所述第一虚拟轴上、所述短边中点在所述第二虚拟轴上,得到所述识别数据。
43.本方案通过第一虚拟轴、第二虚拟轴、虚拟原点以及长边中点、短边中点校正中间数据,识别数据具有较高的精度,即识别数据不会倾斜或者识别数据中的被识别元素不会重叠,提高了示数信息识别精度。
44.作为优选,所述获取示数信息,识别所述识别数据中的示数数据得到示数信息包括:
45.接收识别请求;
46.调取识别模型;
47.利用识别模型识别示数数据得到示数信息。
48.作为优选,所述识别模型为chinese_ocr_db_crnn_server模型。
49.作为优选,所述输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域包括:
50.传输所述示数信息至显示区域并使显示区域显示所述示数信息。
51.作为优选,所述输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域包括:
52.所述示数信息叠加于所述边框内,并使叠加于所述边框内的示数信息与所述边框内的示数数据不重叠,得到存储数据,存储所述存储数据。
53.本方案通过将示数信息叠加于边框内进行存储,便于后期查阅。
54.相对于现有技术,本公开提供的一种基于ai技术的仪器仪表识别方法具有如下优点:
55.1、通过获取识别区域,识别区域包括示数数据以及边框,边框限定识别区域的面积,并使示数数据位于边框以内。限定识别区域可以避免识别区域以外的信息干扰示数数据的识别。降低了示数数据识别过程中的运算压力,并且,提高了示数数据识别效率。
56.2、通过获取中间数据,中间数据主要是用于对识别区域进行相应处理,去掉识别区域中的噪声,提高示数数据识别精度。同时,识别数据对中间数据进行进一步修正,进一步提高了示数数据的识别精度。
57.3、在实际应用过程中,不需要操作人员亲至现场,不需要手工记录,提高了数据记录精度、提高了数据记录效率,并且,降低了操作人员的劳动强度。
58.4、通过在视频中取帧的方式获取前置识别区,并对前置识别区处理后形成识别区域,不需要专业视频获取设备,常规的视频获取设备即可满足需求,降低了识别方法的应用成本。
59.5、直接获取识别区域的视频,从硬件上直接获取识别区域视频,不需要对由视频获取的识别图像进行裁剪处理,降低了硬件的运行压力,提升了示数信息的识别效率。
附图说明
60.出于解释的目的,在以下附图中阐述了本公开技术的若干实施方案。以下附图被并入本文本并且构成具体实施方案的一部分。在一些情况下,以框图形式示出了熟知的结构和部件,以便避免使本公开主题技术的概念模糊。
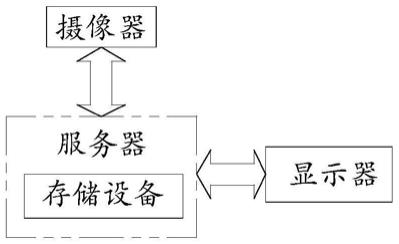
61.图1为本公开的结构框图。
62.图2为本公开的流程图。
63.图3为基于视频获取识别区域方式一的流程图。
64.图4为基于视频获取识别区域方式二的流程图。
具体实施方式
65.下面示出的具体实施方案旨在作为本公开主题技术的各种配置的描述,并且,不旨在表示本公开主题技术可被实践的唯一配置。具体实施方案包括具体的细节旨在提供对本公开主题技术的透彻理解。然而,对于本领域的技术人员来说将清楚和显而易见的是,本
公开主题技术不限于本文示出的具体细节,并且,可在没有这些具体细节的情况下被实践。
66.参照图1至图2所示,一种基于ai技术的仪器仪表识别方法,包括以下步骤:
67.获取识别区域,所述识别区域包括仪器仪表的示数数据以及位于所述示数数据周围的边框,所述边框为长方形;
68.获取中间数据,依次对识别区域进行灰度化、腐蚀、膨胀得到中间数据;
69.获取识别数据,根据所述边框对所述中间数据进行倾斜校正得到识别数据;
70.获取示数信息,识别所述识别数据中的示数数据得到示数信息;
71.输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域。
72.实现本方案的外围设备包括:
73.摄像器,用于获取图像或视频,摄像器支持自动对焦。
74.视频处理模块或图像处理模块,可以采用调用python opencv库方法,对图像数据依次进行灰度化、腐蚀、膨胀、倾斜校正(边缘检测、霍夫变换)。
75.数字识读模块,可以调用paddlehub serving服务,发送识读请求,利用预训练模型chinese_ocr_db_crnn_server进行数字识别。
76.显示器,识别结果输出模块,识读结果输出至装置前端展示,同时存储识读请求记录、识读结果、识读原始图像及识读结果标注图像。本方法实现了独立运行的仪器仪表结果数据的及时性、准确性输入。
77.本方法可应用于复合型真空计等具有led数字显示的仪器仪表,检测仪器检测结果如:pa、温湿度、水分含量、元素含量等电子式仪表的快速识别等。
78.本方法适用于仪器仪表的快速识别,在实现数据采集的情况下,可以提高操作的效率,并且保证记录数据的准确性,同时存储原始视频及图像及对原始图像的识读结果标注,便于后续查验。
79.在一些实施例中,本实施主要介绍识别区域的获取方式。
80.参照图3所示,方式一:采用拍摄视频的方式获取识别区域。本方案采用常规摄像器获拍摄视频,具体方法为:所述获取识别区域包括:
81.获取包含有识别区域的视频;
82.抽取所述视频中至少三帧图像得到识别图像;
83.抽取每帧所述识别图像中的识别区域,并删除每帧所述识别图像中所述识别区域以外的区域得到至少三个前置识别区;
84.根据所述边框叠加至少三个前置识别区得到所述识别区域。
85.参照图4所示,方式二:采用拍摄视频的方式获取识别区域。本方案采用物理处理后的专业摄像器拍摄视频,即利用物理处理的方式使摄像器仅拍摄识别区域,具体地说,可以利用物理遮挡的方式或者调焦的方式使摄像器仅拍摄识别区域。具体方案为:所述获取识别区域包括:
86.获取识别区域的视频;
87.抽取所述视频中至少三帧图像得到识别图像;
88.根据所述边框叠加所述识别图像得到所述识别区域。
89.在一些实施例中,本实施介绍通过图片的形式获取识别区域,关于硬件设备的相关介绍参照上述实施例中采用视频方式获取识别区域的介绍。
90.方式一:所述获取识别区域包括:
91.获取至少三张包含所述识别区域的图像得到识别图像;
92.删除每张所述识别图像中所述识别区域以外的区域得到至少三个前置识别区;
93.根据所述边框叠加至少三个前置识别区得到所述识别区域。
94.方式二:所述获取识别区域包括:
95.获取至少三张识别区域的图像得到识别图像;
96.根据所述边框叠加至少三个识别图像得到所述识别区域。
97.在一些实施例中,所述获取识别数据,根据所述边框对所述中间数据进行倾斜校正得到识别数据包括:
98.预置第一虚拟轴;
99.预置第二虚拟轴,所述第一虚拟轴与所述第二虚拟轴垂直,所述第一虚拟轴与所述第二虚拟轴相交于虚拟原点;
100.获取所述边框的中点;
101.获取所述边框的长边中点,两个所述长边中点的连线过所述中点;
102.获取所述边框的短边中点,两个所述短边中点的连线过所述中点;
103.使所述中点与所述虚拟原点重合,并使所述长边中点在所述第一虚拟轴上、所述短边中点在所述第二虚拟轴上,得到所述识别数据。
104.本方案中第一虚拟轴、第二虚拟轴、虚拟原点、长边中点、短边中点以及中点均采用软件模拟的方式生成,主要用于校正边框的位置。第一虚拟轴、第二虚拟轴、虚拟原点、长边中点、短边中点以及中点不应干扰示数信息的识别。
105.在一些实施例中,所述获取示数信息,识别所述识别数据中的示数数据得到示数信息包括:
106.接收识别请求;
107.调取识别模型;
108.利用识别模型识别示数数据得到示数信息。
109.所述识别模型为chinese_ocr_db_crnn_server模型。识别模型也可以采用其它具有类似功能的模型。
110.在一些实施例中,所述输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域包括:
111.传输所述示数信息至显示区域并使显示区域显示所述示数信息。
112.所述输出示数信息,输出所述示数信息并存储所述示数信息以及所述识别区域包括:
113.所述示数信息叠加于所述边框内,并使叠加于所述边框内的示数信息与所述边框内的示数数据不重叠,得到存储数据,存储所述存储数据。
114.本方法在具体应用时,其物理硬件设备主要包括:摄像器、服务器、显示器,以及配套的通讯设备。其中,服务器内集成有ai处理芯片,摄像器与服务器通讯,服务器与显示器通讯。摄像器主要用于获取视频或图片,摄像器获取的视频或图片上传至服务器,服务器内集成有实现上述方法的代码,服务器执行实现上述方法的代码对摄像器获取的图片或视频进行相关处理,最终将示数信息传输至显示器并由显示器显示示数信息。服务器还应包括
存储设备,由存储设备存储上述方法中限定需要存储的信息。
115.以上对本公开主题技术方案以及相应的细节进行了介绍,可以理解的是,以上介绍仅是本公开主题技术方案的一些实施方案,其具体实施时也可以省去部分细节。
116.另外,在以上公开的一些实施方案中,多个实施方案存在组合实施的可能,各种组合方案限于篇幅不再一一列举。本领域技术人员在具体实施时可以根据需求自由结合实施上实施方案,以获得更佳的应用体验。
117.本领域技术人员在实施本公开主题技术方案时,可以根据本公开的主题技术方案以及附图获得其它细节配置或附图,显而易见地,这些细节在不脱离本公开主题技术方案的前提下,这些细节仍属于本公开主题技术方案涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1