城市生态环境气土水耦合模拟预报方法与流程
1.本发明属于环境监测技术领域,具体涉及城市生态环境气土水耦合模拟预报方法。
背景技术:
2.近年来,伴随着人类活动的不断加剧,各种环境污染问题日益突出。城市大气污染、水体污染、土壤污染等问题相互影响、相互作用,城市生态环境问题存在很多不确定性和复杂性,越来越受到政府、社会公众及科研工作者的关注和重视。
3.地球表面的环境复杂多变,污染要素产生、传播、转换的过程通常不会在绝对的单介质体中完成。污染物在大气、土壤、水体等多介质环境的分布是通过跨介质迁移来实现的,多介质环境的界面不仅是污染物跨介质迁移的通道,也是污染物和微小生物的高富集区。跨介质迁移涉及到介质与介质间的界面效应,污染物具有在界面附近转化、在单介质环境内部转化并存的特性。如大气中会含有一定量的pm2.5、pm10等固体悬浮物及co、no2、so2等污染要素,在大气中扩散传播的同时伴随着降雨、大风降落或附着于水体、植被、地表等地物单元上,也会随着下渗、径流的作用,渗入土壤或进入水体进行扩散。为简化化学物质在环境介质中的迁移和分配,一些学者在质量守恒定律的基础上,构建环境数学模型模拟污染物在生态环境当中的行为,包括大气污染物扩散模型、土壤属性预测模型、水环境数学模型等,但对气、土、水全过程耦合交互模拟方法的研究相对较少,基于信息耦合的气土水预报模拟方法尚不多见。
技术实现要素:
4.针对城市典型污染物受大气运动、降雨、径流、下渗等过程影响,在大气、土壤、水体多种介质中相互迁移过程复杂、预警预报难的问题,本发明在充分梳理大气污染物扩散模型、土壤属性预测模型、水环境数学模型的基础上,基于信息耦合的思路,设计并研发城市生态环境气土水耦合预报模拟系统软件,提供城市生态环境气土水耦合模拟预报方法,以信息化手段实现城市生态环境典型指标要素的全过程、自动化预报模拟,进一步提升预报模拟的时空精度和准确性。
5.为达到上述目的,本发明的技术方案如下:
6.城市生态环境气土水耦合模拟预报方法,包括如下步骤:
7.步骤一:通过多种手法获取多源数据,并利用数据预处理和数据融合技术对多源数据进行预处理和数据融合,所述多源数据至少包括:遥感数据、环境数据、行政边界数据、土壤属性数据、水利水文数据、气象数据;
8.步骤二:利用步骤一处理后的多源数据,构建改进的大气污染物扩散模型、城市水环境虚拟传感监测与动态预测模型以及城市多尺度土壤要素监测模拟模型;
9.所述改进的大气污染物扩散模型通过如下方式构建:
10.在传统wrf-chem模型上,通过构建精细化的区域下垫面对wrf-chem进行改进,将
中尺度wrf-chem模式与cfd模型耦合,对于构建的高分辨率的城市大气污染物扩散模型,验证其对污染物扩散的模拟能力;
11.所述城市水环境虚拟传感监测与动态预测模型通过如下方式构建:
12.以河网水系基础资料以及遥感影像融合数据为基础,利用遥感图像处理技术提取圩区内水域面积,以此构建一二维河网水动力水质精细化模型;对模型进行率定与验证,并进行模拟;
13.所述城市多尺度土壤要素监测模拟模型通过如下方式构建:
14.融合多源、多时相、多平台的遥感数据以及野外实测光谱数据,进行土壤关键属性的建模预测,采用偏最小二乘的机器学习方法进行建模预测,以筛选最优的估测模型及参数组合,并对模型估测结果进行精度评价和验证;
15.步骤三:以干湿沉降、土壤水分下渗、水体蒸发原理为基础,将大气污染物扩散模型、土壤属性估算模型、城市水环境模型串联和耦合,构建时空耦合模型;并针对不同环境情况构建模拟预测模型,并设置模型运算的不同阈值条件,当阈值条件被触发时进行相应的模型计算以及结果输出。
16.进一步的,还包括步骤四:提供大气-水环境-土壤的模型接口,提供各模块的对应接口以实现耦合时空模型自动化;提供数据处理接口,确保监测数据、卫星/无人机遥感数据、人工监测数据等多源数据能够实时传输到单项模型和耦合模型,实现数据传输自动化;提供各模型参数配置接口,实现模型参数、模型方案远程配置;提供模型计算接口,实现模型计算远程调用;提供模型计算结果展示接口,实现多类型模型结果实时传输。
17.本发明的有益效果为:
18.1.本发明基于改进的城市大气污染物扩散模型、城市河网水环境模型以及土壤属性估算模型构建城市生态环境气-土-水全耦合模拟模型,以干湿沉降联动城市典型污染物在气土水中的耦合交换,实现城市典型污染物在气土水中迁移转化的全过程模拟预测。
19.2.基于多源数据,提出了融合cfd和wrf-chem模式的城市大气污染物多尺度模拟方法,进一步提升城市大气污染物模拟精度,实现大气污染物模拟预报精细化;构建了一维河网与二维湖泊水动力-水质耦合模型并以此为基础,实现城市水域水环境要素一维水域由点到线,二维水域由点到面的虚拟传感监测与水质动态模拟;利用机器学习技术和遥感图像处理技术对多源遥感数据进行融合,并对南京市中心的土壤属性进行建模和制图,实现土壤属性的反演。
20.3.提供大气污染物扩散模型、城市水环境模型以及土壤墒情模型信息化接口,在气-土-水耦合模型的基础上,实现了耦合模型计算流程自动化。
附图说明
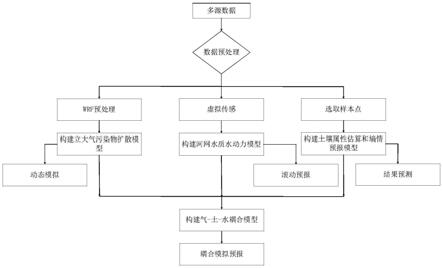
21.图1为本发明提供的城市生态环境气土水耦合模拟预报方法总体流程示意图;
22.图2为本发明业务流程示意图;
23.图3为大气污染物模型构建技术路线图;
24.图4为南京市主城区no2浓度日平均变化分布图;
25.图5为金川河典型区域河网构建图;
26.图6为污染物二维扩散演进结果;
27.图7为哨兵2号与landsat 8数据的相关性示意图;
28.图8为前10个主成分的方差解释率和预测残差(s2-12+oli7);
29.图9为预测结果;
30.图10为大气污染物模拟结果;
31.图11为土壤属性模拟结果;
32.图12为城市水环境模拟结果;
33.图13为多要素、多介质的污染物变化趋势模拟预测图;
34.图14为本发明方法对污染物在多介质中的转移过程进行分析和预测示意图。
具体实施方式
35.以下将结合具体实施例对本发明提供的技术方案进行详细说明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。本发明提供的方法可以在诸如一组计算机可执行指令的计算机系统中执行。
36.本发明通过对分项模型的改进,建立面向城市生态环境的区域时空模型,融合天空地多源监测感知数据与信息,以时间为驱动耦合气土水模拟方法,形成全过程自动化模拟。本发明公开了一种城市生态环境气土水耦合模拟预报方法,其总体流程如图1所示,包括如下步骤:
37.步骤一:充分利用航天、航空、地面监测站以及人工观测方法获取遥感数据、环境数据、行政边界数据、土壤属性数据、水利水文数据、气象数据等多源数据,并利用数据预处理和数据融合技术对多源数据进行预处理和数据融合。
38.基于dem(数字高程模型digital elevation model)数据、地形数据、多光谱数据、高光谱数据、行政边界数据、生态环境基础数据等多种数据深入分析城市特征,形成精细化下垫面数据,其主要内容包括:获取下垫面数据,并使用arcgis将其打开,在arcgis中新建new document,并加载下垫面数据,打开图像的properties属性,在symbology菜单下选择classified功能,可视化显示当前下垫面数据的土地利用分类情况,然后加载30m dem数据、30m地形数据、30m的多光谱数据、高光谱数据,综合分析图像下垫面数据和遥感数据是否对应一致,并在editor选项中将不一致的区域更换为对应的土地利用结果,并通过上采样将原始土地利用结果从500m提高为30m,以人工检视和图像空间分辨率来提升下垫面数据的精度;基于流域水系数据、水利工程基础数据、河道断面数据等研究城市河道基础概况。各数据示例如表1所示:
39.表1时空模型建设元素表
[0040][0041][0042]
步骤二:利用卫星遥感、无人机遥感、地面监测站、人工观测等天-空-地-人全方位监测手段获取大气、水质、土壤墒情等多源数据,构建部署改进的大气污染物扩散模型、城市水环境虚拟传感监测与动态预测模型以及城市多尺度土壤要素监测模拟模型,并将各数据输入大气模型、水环境模型以及土壤模型进行滚动计算,实现城市大气污染物、城市水环境以及城市土壤墒情的模拟预测。具体包括如下过程:
[0043]
1.高分辨率大气污染物扩散模型
[0044]
在传统的wrf-chem模型上,通过构建精细化的区域下垫面对wrf-chem进行改进,改进内容包括:在获得精细化的下垫面数据后,在matlab中加载hdf importort tool工具,并利用geographic box对区域进行编辑,并通过输入左上、左下、右上、右下经纬度以获得合适的区域,并重命名该波段名称,保存并导入;然后通过vi.landuse.m修改左上、左下、右上、右下经纬度信息,最后利用run landuse.m将下垫面数据转换为nc格式;最后在fortran中打开存储下垫面关键信息的可执行程序,并将nx和ny(即经纬度信息)进行替换,最后执行f90文件以完成模型中的文件替换。在提升wrf-chem模型在大气污染物扩散模拟方面的空间精度后,通过开发wrf-chem模型的远程驱动和调用模块以改善wrf-chem模型使用的易用性,并将中尺度wrf-chem模式与cfd模型耦合,其中利用cfd中的fluent求解器,测试二方程k-ε模型的湍流模拟,采用标准壁面函数和simple算法,初始参数设置使用标准空气的设
置方案,密度设置为恒定的1.225kg/m3,粘性设定为1.7894e-05kg/m-s。污染物物理性质与浓度、扩散速度等据污染物扩散点调查结果而定。城市风场中空气是低速流动的,在这个场合中空气的密度变化极其微小,可以忽略,所以在模拟中将其看做不可压缩流体。对于构建的高分辨率的城市大气污染物扩散模型,验证其对污染物扩散的模拟能力。具体包括如下步骤:
[0045]
1-a.大气污染物模型构建技术路线图如图3所示。首先获取气象相关数据,数据主要包括气象站观测数据(国家站逐小时瞬时风速、国家站逐小时瞬时风向、自动站逐小时瞬时风速、自动站逐小时风向)、城市建筑地理信息(建筑位置、建筑高度)、国家基础地理信息、气象站点信息、土地利用数据、大气污染污染源信息、污染物浓度信息等。
[0046]
在使用wrf-chem模拟污染物之前,考虑到人为排放源对模拟效果的影响,利用清华排放源代替之前制作的全球人为排放源。针对2016年meic清单数据,需进行处理并制作人为排放源数据。此外还将wrf-chem自带的粗糙下垫面替换为精细下垫面,替换后的土地利用分类更加符合演技区域情况、更加精细。
[0047]
1-b.然后根据区域的计算域边界的复杂程度,选取不同的网格划分方式,在二维网格中四边形单元常用于结构网格的构造,三角形单元常用于非结构网格的构建;在三维网格中,六面体单元常用于结构网格的构建,四面体、五面体单元常用于构造非结构网格,其中五面体单元包括金字塔形单元和棱柱或楔形单元,由于研究区域大多存在复杂的建筑模型,因此选用四面体和金字塔结合的方式。
[0048]
在确定网格划分方式后,通过下式确定边界条件:
[0049][0050]
式中,z0、为标准参考高度和标准参考高度处的平均风速,我国标准参考高度取为10m;z、为任一高度和任一高度处的平均风速;α为地面粗糙度指数,地形越粗糙,地表对气流的阻滞作用越强,α也越大。
[0051]
1-c.在完成步骤1-b的基础上,根据预处理数据、下垫面等基础资料,构建大气污染物扩散模拟模型。首先构建wrf的预处理系统(wps),该系统由geogrid、ungrib和metgrid组成。在geogrid中确定模式区域并将静态地形数据插值到格点,然后在ungrib中从grib格式的数据中提取气象要素场,再从metgrid中将提取出的气象要素场水平插值到由geogrid确定的网格点上。
[0052]
预处理系统设置完成后构建wrf-chem模型,首先配置wrf-chem中的namelist.iput参数,主要包括设置模拟的时间控制,输出的的时间间隔(min),每个文件包含的文件数,模拟的积分时间步长,垂直方向终止格点值,输入数据的垂直层次数以及输入数据的土壤层数。模式选择三层嵌套区域模拟方案,中心经纬度为32.022n,118.7825e,投影方式为lambert投影,两条标准纬度分别为30
°
n和60
°
n。外层网格数为59,水平分辨率为4500km,内层网格数为61,水平分辨率为0.5km,模式顶高为50hpa。物理参数方案采用lin微物理方案、grel
ⅰ‑
3积云对流参数化方案、dudhia短波辐射方案和rrtm长波辐射方案、ysu边界层方案以及noah陆面过程模式;化学参数方案采用radm2气相化学反应机制和mosaic气溶胶机制。将metgrid的输出文件链接到wrf-chem模型的运行路径下,并执行real.exe实现
wrf-chem模型初始化,待初始化完成后运行wrf.exe开始模型计算。
[0053]
1-d.在步骤1-c模型中设置模拟时间为24小时,时间间隔为小时,计算得到南京市主城区大气污染物分布特征,并对结果进行验证,模拟结果如图4所示,结果表明南京市主城区部分大气污染物呈现明显的周末效应特征。
[0054]
验证公式采用平均偏差(mb)、标准化平均偏差(nmb)、标准化平均误差(nme)以及均方根误差(rmse),具体公式如下。
[0055][0056][0057][0058][0059]
在上述表达式中,cm为模拟值,c0为监测值,n为样本个数。其中反映nmb模拟预报值与监测值的平均偏离程度,nme反映模拟值与监测值的平均误差,rmse反映模拟值与监测值的偏离程度。将南京市逐时模拟值与观测值进行对比验证,验证结果表明对于no2,所有站的r值达到0.5以上,其中有八个站r值达到0.6以上,两个站r值达到0.7以上;对于o3,所有站的r值达到0.7以上,其中有四个站的r值达到0.8以上。
[0060]
2.城市水环境虚拟传感监测与动态预测模型
[0061]
以河网水系基础资料以及遥感影像融合数据为基础,利用遥感图像处理技术提取圩区内水域面积,以此构建一二维河网水动力水质精细化模型;并利用公式(6)-(8)对圣维南方程组进行差分,对河道离散方程组采用双追赶法处理;以构建的水动力水质模型以及河道边界条件为基础,设置河道关注节点,通过动态预警预测功能实现城市水环境虚拟传感监测以及动态预警预测。
[0062][0063][0064][0065]
其中,δt为时间步长,δx为距离步长,θ为权重系数,j表示为断面编号,n表示为第n时段,δf=f
n+1-fn。
[0066]
具体包括如下过程:
[0067]
2-a.选取南京金川河为研究对象,通过现场调研、外业踏勘等方式完成基础数据收集,包括河流水系、水利工程调度、土地利用、水动力水质(水质浓度、流量、水位)、河道地形等基础数据;利用高分遥感,分析提取河流水系的特征参数,包括河流水系的拓扑关系、
水面率、河道长度等,作为模型构建的基础底图与特征参数;利用生态环境融合数据平台,对接气象、水文、水动力、水质、土壤含水量等要素实时与预报信息,支撑模型构建与模拟计算。
[0068]
目前收集到的数据有金川河河流水系、水利工程及调度、监测站部分水位水质监测数据过程。其中监测站信息如下表2所示:
[0069]
表2金川河测站统计
[0070]
测站名称所在河流经度纬度宝塔桥金川河118.85988888888932.1086388888889水关桥水站外金川河118.75248407083432.1010175269051护城河南路水站金川河118.75262422271432.0895606870731红山南路桥水站南十里长沟118.78452335573532.0932914891514金川河水站金川河118.75905448869932.0900201593893宝塔桥水站外金川河118.74577833391332.1087318806775三河听涛水站城北护城河118.75966108407232.0923561311238金陵乡水站二仙沟118.74953569932632.1085933513208
[0071]
水质监测站主要监测的参数有cod、浊度、总磷、总氮、氨氮、ph、温度等,本次数据收集和下文的水环境模型模拟要素选取cod为模拟指标。
[0072]
2-b.基于步骤2-a构建河网水动力-水质模型,研究区域范围北以金川河为界,东至玄武湖,南达秦淮河,西到长江,其中玄武湖以常水位作为水位边界,长江选取实时潮位作为水位边界,区域内的水利工程采用规划调度,区间入流主要考虑南十里长沟等河道的入流汇入和水质监测数据。具体构建范围见图5。
[0073]
研究区域水体在河道内的运动具有明显一维特征,河网采用1d模型描述,求解应用st.vennant方程组描述:
[0074]
连续方程:
[0075]
运动方程:
[0076]
式中:q为流量(m3/s);h为断面水深(m);s0为源项;a为断面面积(m2);b为河面总宽度(m);vx为旁侧入流在水流方向上的流速分量(m/s);k为流量模数:g为重力加速度;α为动量修正系数:
[0077]
一维河道非恒定流的基本方程是一组拟线性偏微分方程组,本例采用数值计算方法为有限差分法。
[0078]
非点源污染的产生包括干期累积和雨期冲刷两个过程。污染物累积和冲刷过程均使用指数方程刻画,分别如下所示。式中:m是污染物实际累积量,其变化量等于径流污染物负荷,单位是kg
·
ha-1;b
max
为污染物最大累积量,单位是kg
·
ha-1;kb为污染物累积速率,单位是day-1;c1和c2分别为非点源污染冲刷系数和冲刷指数。污染物累积过程的含义为干期长度越长,污染物实际累积量越接近最大累积量。污染物冲刷过程的含义为径流污染物
负荷和径流流量、污染物实际累积量正相关。
[0079][0080][0081]
为了便于后期模型的标准化建设与模型服务封装,模型在构建过程中需按照一定标准进行,主要包括河道断面命名标准、点命名标准、水利工程(水闸、泵站)命名标准、河段命名标准、堤防命名标准、道路命名标准、多边形命名标准、2d区间命名标准等。
[0082]
2-c.基于步骤2-b对模型进行率定与验证,并对进行模拟。选取历史水位观测数据完成模型的初始参数率定工作,分别选取汛期高水位、非汛期低水位开展原型观测实验,对模型进行率定与验证,提高模型的准确性。
[0083]
河道糙率值主要根据《水力学手册》、《河道整治规划设计规范》等相关参考文献中有关人工渠道以及天然河道的经验值初步拟定为0.02-0.04。然后采用历时资料对金川河模型进行参数率定,最终确定金川河区域各河道的糙率。
[0084]
模型经过率定,最终确定内金、外金、西北护城河、城北护城河骨干河道糙率为0.025-0.03,其他河道河道糙率为0.03-0.035。
[0085]
模型的率定验证主要用于调整模型中的相关参数以提高模拟结果的精确度。一维模型中的主要影响因子包括空间步长、时间步长以及河道糙率等。按照模型率定验证相关规范要求,率定验证中采用nash-sutcliffe系数nse和可决系数r2对模型有效性进行评定。nash-sutcliffe系数用于表示模拟计算值系列与实测系列数量级近似程度,可决系数r2用来表示模拟计算值系列与实测系列形状吻合程度,其主要公式如下。
[0086][0087]
式中:nse为模拟场次洪水过程nash-sutcliffe系数;y
iobs
为实测序列第i位数据;y
isim
为计算序列第i位数据;y
imean
为实测序列均值;n为实测数据总数。
[0088][0089]
式中:r2为模拟场次洪水过程可决系数;y
obs
为实测序列数据;为实测序列均值;y
sim
为计算序列数据;为计算序列均值。
[0090]
2-d.根据步骤2-c对南京市金川河污染物迁移扩散进行模拟研究,基于河道断面、排口水质实时监测数据,选取水体感官指标(透明度)、典型水质指标(cod、tn、do)作为分析对象,建立水体浊度和透明度关系,模拟污染物在水体中的迁移扩散过程,分析对流、扩散、弥散物理过程以及糙率、降解系数等相关参数对污染物运移过程的影响,基于物联感知数据结合历史水质资料完成模型率定验证,分析研究污染物二维扩散演进过程及关注点污染物随时间浓度变化过程,模拟结果如图6所示。
[0091]
3.城市多尺度土壤要素监测模拟模型
[0092]
融合多源、多时相、多平台的遥感数据以及野外实测光谱数据,进行土壤墒情(土
壤水分状况),土壤质地等土壤关键属性的建模预测,采用偏最小二乘的机器学习方法进行建模预测,以筛选最优的估测模型及参数组合,并对模型估测结果进行精度评价和验证,以提高土壤属性信息的预测精度。与此同时,结合微地形、温度、降水、植被指数等环境参数,采用机器学习方法构建土壤-景观模型,实现关键土壤属性的区域检测。具体包括如下过程:
[0093]
3-a.获取主要研究数据,在研究区内采集地表光谱、无人机成像数据以及遥感影像数据,并拍摄数码照片用以提取植被覆盖度等信息,同时采集土壤样品。除布设土壤采样点外,在道路交叉口处布设地面控制点以对遥感影像进行几何精校正。主要包括:
[0094]
①
野外原位光谱采集
[0095]
野外原位光谱采用美国asd公司的fieldspec 4hi-res型地物光谱仪测量,其波长范围是350~2500nm,采样间隔在350~1050nm为1.4nm,在1000~2500nm为2nm,插值后输出光谱间隔为1nm。每个点采集光谱前均进行一次白板校正,每个样点采集原位光谱20条,取其平均值为该样点的平均光谱。
[0096]
②
无人机/遥感影像获取
[0097]
采集土壤样品之前,即地表尚未被破坏之前,晴朗无云条件下,采用八旋翼电动无人机(无人机净重约6kg,飞行时间20min,飞行高度100m),同步搭载成像仪对研究区进行飞行监测,以获取研究区内无人机遥感影像。同步收集高分5号高光谱、高分1号、高分2号、高分3号(雷达)、amsr-2、oli、smap、哨兵1号等遥感影像,上述遥感数据部分可通过网站免费下载,部分可通过编程订购的方式获取。
[0098]
下载到的多源遥感影像,首先进行几何精校正、大气校正和辐射校正等常规预处理,然后进行空间分辨率、光谱范围和光谱采样间隔的匹配。对匹配好的遥感影像,逐栅格提取光谱。
[0099]
大气校正:采用常规的大气校正方法,如flaash和6s模型等方法。
[0100]
几何校正:采用地面控制点(ground control point,gcp)法进行几何精校正。
[0101]
首先对基础图件收集和预处理。收集区域dem、哨兵2号、landsat 8等基本数据,并完成预处理工作。
[0102]
下载预处理区域dem数据;
[0103]
下载研究区哨兵2号l1c数据一景,过境时间为2021年3月22日,因l1c级产品是经过正射校正和几何精校正的大气表观反射率产品,并没有进行大气校正,所以对其进行辐射定标和大气校正,获取l2a级产品,以获取基层反射率数据;
[0104]
③
收集研究区landsat 8遥感影像一景,过境时间为2021年3月26日,并对其进行了大气校正,以获取反射率数据;
[0105]
然后对数据进行初步分析,将含水量数据分别与哨兵2号、landsat 8影像数据做相关分析,结果如图7所示。
[0106]
由于哨兵2号和oli的空间分辨率不同,如果要将两者同时用于后续模型建立,首先要进行空间分辨率的匹配,将其重采样为30米空间分辨率。
[0107]
3-b.基于步骤3-a构建偏最小二乘回归模型模拟土壤墒情。偏最小二乘回归方法在建模的过程中将多元线性回归、主成分分析、变量间的典型相关分析有机结合了起来,实现了回归建模、数据结构简化和两组变量间的相关分析,给多元数据分析带来了极大的便
利。光谱数据波段众多,很难用传统的分析方法进行统计分析,plsr刚好解决了这个问题,因此近年来广泛应用于光谱数据分析处理。模型构建主要包括如下表3所示参数:
[0108]
表3
[0109][0110]
3-c.基于步骤3-b获得的模拟预测结果,采用验证集决定系数(coefficient ofdetermination in prediction,r2p)、验证集均方根误差(root mean square error ofprediction,rmsep)和实测值标准偏差与预测值标准偏差的比值(ratio of standard deviation to standard error of prediction,rpd),具体公式如下:
[0111][0112][0113]
rpd=sd/rmse
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0114]
μd和分别为实测值和预测值,为实测值的平均值,a为建模集的样本数,b为验证集的样本数,sd为验证集样本的实测值标准偏差。
[0115]
r2p及rpd越大,rmsep越小说明预测效果越好。
[0116]
验证过程如下:
[0117]
采用哨兵2号12个波段+oli的7个波段,结果如图8所示。
[0118]
结果表明采用哨兵2号和oli数据相结合的方式,建立偏最小二乘回归模型的精度最高,残差不高于0.008g/g,基于这个模型,对研究区土壤含水量进行了预测制图,结果如图9所示。
[0119]
步骤三:构建基于干湿沉降、土壤水分下渗、水体蒸发等原理的时空耦合模型。针对在晴空状态下的日常监测,当大气、土壤、水体某单一或多个监测要素出现污染情况时,监测站点采集信息传递到数据中心,然后通过信息化接口将异常信息传入模型,当日常信息达到一定阈值时,触发耦合模型进行计算,对污染情况的变化趋势进行逐小时的模拟预测。针对在暴雨、沙尘、高温等异常环境条件下的污染情况,当触发耦合模型模拟污染物变化情况的基础上,分析模拟污染物传递到其它介质的趋势和变化情况,形成多要素、多介质的污染物变化趋势模拟预测,主要过程如图13所示。
[0120]
在上述基础上,通过融合的静态基础地理信息,提取有极强针对的区域空间特征;结合天空地人的实时监测数据,提取多类型数据中的时序特征,并将时间和空间信息输入区域时空模型,主要运行流程如图2所示。
[0121]
首先设置相应污染物浓度作为触发模型计算的阈值条件,当某一污染物的浓度达到指定阈值后,驱动耦合模型相应的模块进行计算,并通过模型耦合接口模拟污染物的扩
散转移过程,最后将模拟预测结果进行可视化展示。例如,当空气中的污染物达到指定阈值后,触发大气污染物扩散模型计算并滚动模拟大气污染物变化的趋势,结果如图10,通过时间进度条实时展示,同时重点关注污染物浓度较高的地区;在大气污染物浓度超过一定时间后,触发土壤属性估算模型计算经干湿沉降作用导致的土壤墒情及土壤属性变化情况,结果如图11;当土壤中污染物浓度达到阈值后触发城市水环境模型计算,滚动模拟未来河道水质变化趋势如图12。
[0122]
以精细化下垫面数据、城市河道基础数据、动态时序监测数据为基础,基于大气污染物扩散模型、土壤属性估算模型、城市水环境模型,主要在干湿沉降、土壤水分下渗、水体蒸发等原理的基础上将大气、水环境以及土壤模型进行串联耦合,其中干湿沉降公式如下:
[0123]
qj沉降=(cj湿
×
vj湿+cj干
×
vj干)
×aꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0124]
其中qj沉降为大气干湿沉降j元素的沉降通量密度,cj湿为湿沉降j元素的含量,vj湿为测试容器中湿沉降的体积,cj干为干沉降j元素的含量,vj为测试容器中干沉降的重量,a为换算常数,最终以耦合结果对污染物在多介质中的转移过程进行分析和预测,结果如图14所示。
[0125]
步骤四,以上述模型为基础,提供大气-水环境-土壤的模型接口,提供各模块的对应接口以实现耦合时空模型自动化。提供数据处理接口,确保监测数据、卫星/无人机遥感数据、人工监测数据等多源数据能够实时传输到单项模型和耦合模型,实现数据传输自动化;提供各模型参数配置接口,实现模型参数、模型方案远程配置;提供模型计算接口,实现模型计算远程调用;提供模型计算结果展示接口,实现多类型模型结果实时传输。具体如下:
[0126]
基于步骤三提供大气、土壤以及水环境的信息化接口。大气预报结果接口id设置为getgasvalues,其主要参数如表4所示:
[0127]
表4
[0128][0129]
土壤属性估算模型接口id设置为getsoilvalues,其主要接口参数如下表5所示:
[0130]
表5
[0131][0132]
城市水环境模型接口id设置为getwatervalues,其主要接口参数如下表6所示:
[0133]
表6
[0134][0135]
气土水耦合模拟接口id设置为getcomprehensivevalues,其主要接口参数如下表7所示:
[0136]
表7
[0137][0138]
需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1