一种圆形物体检测方法及系统
1.本发明属于圆形物体识别技术领域,更具体地,本发明涉及一种圆形物体检测方法及系统。
背景技术:
2.随着视觉技术的发展,越来越多的场合需要用到视觉对物体进行检测和识别。其中,对圆形物体的检测和识别在各种场合应用较多,目前较为常用的是通过hough算法检测,但该算法计算量较大,从而导致运行速度慢,识别效率低。
技术实现要素:
3.本发明提供一种圆形物体检测方法,旨在降低hough算法的运算量,提高算法运行效率。
4.本发明是这样实现的,一种圆形物体检测方法,所述方法包括如下步骤:
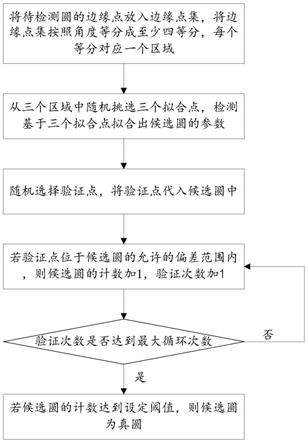
5.s1、将待检测圆的边缘点放入边缘点集d,将边缘点集d按照角度等分成至少四等分,每个等分对应一个区域;
6.s2、从三个区域中随机挑选三个拟合点d1,d2,d3,检测基于三个拟合点d1,d2,d3拟合出候选圆的参数;
7.s3、随机选择验证点d4,将验证点d4代入候选圆p1中;
8.s4、若验证点位于候选圆的允许的偏差范围内,则候选圆p1的计数score加1,验证次数k2=k2+1,返回步骤s3,在验证次数达到最大循环次数k
2max
时,若候选圆p1的计数score达到设定阈值n
t
,则候选圆p1为真圆。
9.进一步的,在验证次数达到最大循环次数k
2max
时,若候选圆p1的计数score未达到设定阈值n
t
,则候选圆p1为假,则执行步骤s2,在基于三个拟合点d1,d2,d3拟合出候选圆的参数后,令拟合循环次数k1=k1+1,直至拟合循环次数k1达到最大拟合循环次数k
1max
。
10.进一步的,在边缘点集划分的区域数量大于6时,拟合点d1,d2,d3位于不相邻的三个区中。
11.进一步的,验证点d4的选择方法具体如下:
12.从其他区域中随机选取验证点,其他区域是指拟合点所在区域之外的区域;或者是,从每个区域随机选取若干数量的验证点,拟合点之外的所有点都可能成为验证点。
13.进一步的,边缘点集d的等分方法具体如下:
14.获取边缘点集d中上边缘点、下边缘点、左边缘点、右边缘点;
15.将上边缘点与下边缘点连线l1,左边缘点与右边缘点连线l2;
16.将连线l1与连线l2的交点作为中心,将边缘点集d基于角度等分成至少四等分。
17.本发明是这样实现的,一种圆形物体检测系统,所述系统包括:
18.工业相机,工业相机与处理单元连接;
19.工业相机用于采集工位上的待检测物体图像,所述待检测物体的采集面为圆形,
将采集到的待检测物体图像发送至处理单元,处理单元基于上述圆形物体检测方法识别出图像的圆形物体。
20.相比于传统的hough算法,本发明提供的圆形物体检测方法可以大幅减小算法的计算量、提高执行效率、减少内存消耗。
附图说明
21.图1为本发明实施例提供的圆形物体检测方法流程图;
22.图2为本发明实施例提供的边缘点集的分区示意图。
具体实施方式
23.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
24.图1为本发明实施例提供的圆形物体检测方法流程图,该方法具体包括如下步骤:
25.步骤(1)将待检测圆的边缘点放入边缘点集d,初始化参数单元集p=null,循环次数k1=0,k2=0,计数变量score=0;
26.步骤(2)将边缘点集d按照角度等分成至少四等分,每个等分对应一个区;
27.获取边缘点集d中上边缘点、下边缘点、左边缘点、右边缘点,将上边缘点与下边缘点连线l1,左边缘点与右边缘点连线l2,将连线l1与连线l2的交点作为中心,将边缘点集d基于角度等分成至少四等分;
28.本发明以8等分为例进行说明,将边缘点集d按照角度等分成8等份,如图2所示。每个等分对应一个区域,即第一区域为0~45
°
,第二区域为45
°
~90
°
,第三区域为90
°
~135
°
,第四区域为135
°
~180
°
,第五区域为180
°
~225
°
,第六区域为225
°
~270
°
,第七区域为270
°
~315
°
,第八区域为315
°
~360
°
。
29.步骤(3)从三个区中随机挑选三个拟合点d1,d2,d3;
30.拟合点d1,d2,d3分别来自三个区,即每个区中随机选择一个拟合点,在本发明实施例中,在边缘点集划分的区域数量大于6时,点d1,d2,d3位于不相邻的三个区域中。
31.步骤(4)检测基于三个拟合点d1,d2,d3是否能拟合出候选圆的参数,若检测结果为是,则执行步骤(5);若检测结果为否,则执行步骤(7);
32.圆的表达式为:(x-a0)2+(y-b0)2=c
02
,将三个点d1,d2,d3的坐标代入圆表达式,求解候选圆的参数a0、b0、c0,得到候选圆的方程。
33.步骤(5)随机寻找验证点d4(x4,y4)代入候选圆p1的方程,求解点d4的半径c1,检测是否满足|c
1-c0|≤e,e是设定的误差,若满足,则执行步骤(8);若不满足,则执行步骤(6);
34.在本发明实施例中,若从不相邻的三个区域
①③⑤
随机选取三个拟合点d1,d2,d3,拟合成候选圆p1,则从其他区域
②④⑥⑦⑧
中随机选取验证点,用于验证拟合的候选圆p1方程是否正确;
35.或者是,从每个区域随机选取若干数量的验证点,验证拟合的候选圆p1方程是否正确,拟合点之外的所有点都可能成为验证点;
36.步骤(6)在边缘点集中d将该点d4排除,执行步骤(5);
37.步骤(7)则拟合循环次数k1=k1+1,检测拟合循环次数k1是否大于k
1max
,k
1max
为最大循环次数,若检测结果为是,则算法结束;若检测结果为否,则执行步骤(3);
38.步骤(8)将候选圆p1的计数score加1,若计数score小于设定阈值n
t
,且在验证次数k2=k2+1后,k2小于k
2max
,k
2max
为最大循环次数,则执行步骤(5),若计数score小于等于设定阈值n
t
,且验证次数k2=k2+1后,k2小于k
2max
,确定候选圆p1为真圆,否则,计数score小于设定阈值n
t
,且验证次数k2=k2+1后,k2大于k
2max
,则候选圆p1标记为假,执行步骤(3)。
39.本发明还提供一种圆形物体检测系统,该系统包括:
40.工业相机,工业相机与处理单元连接;工业相机用于采集工位上的待检测物体图像,所述待检测物体的采集面为圆形,将采集到的待检测物体图像发送至处理单元,处理单元基于上述圆形物体检测方法识别出图像的圆形物体。
41.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1