一种新型的汽车保险收费计算方法与流程
一种新型的汽车保险收费计算方法
1.计数领域
2.本发明涉及保险计算方法计数领域,尤其涉及一种新型的汽车保险收费计算方法。
3.背景计数
4.车辆保险收费现阶段是按照车辆有无违章、出险次数等定义的,然而车辆未违章未出险并不能代表驾驶员的驾驶习惯是良好的,不良的驾驶习惯会带来较大的安全风险,同时也会增加车辆后期出险的可能性,为了能够迫使驾驶员培养良好的驾驶习惯减少车辆事故率,有必要改变下车辆保险收费方式,因此设计一种新型的汽车保险收费计算方法来提高驾驶规范。
技术实现要素:
5.本发明的目的是,提供一种新型的汽车保险收费计算方法,以克服目前现有计数存在的上述不足。
6.为了实现上述目的,本发明采用了如下计数方案:
7.一种新型的汽车保险收费计算方法,包括带有adas功能的汽车,汽车中带有探测前后车距离的检测装置,用来采集车辆obd口读取车辆信息的采集单元,具体的通过以下几种情况来计算:
8.s1、通过采集的信息来计算前车保持的距离来判断车辆的安全性,若安全距离超过一定的数值的危险驾驶次数增加,计数z1;
9.s2、通过变道时是否与后车保持安全距离来判断车辆的安全性,如果变道的距离超过安全距离,则危险驾驶次数增加,计数z2;
10.s3、通过减速度来判断车辆的安全性,若是驾驶车辆突然急刹,且减速度大于一定速度时,则计算刹车急刹车时长,计时t3;
11.s4、通过横摆角速度来判断车辆的安全性,当车速大于一定速度时,则计算超速的时长,计时t4;
12.s5、结合s1-s4的参数来计算最后的总保护费k,具体的计算公式为:k=(k1*(t3+t4)+(z1+z2))*k2+k3,其中k1,k2为比例系数,k3为第二年保费调整最低系数,最终的后一年保费为当年保费乘以系数k。
13.优选的,s1中z1具体的计算如下:通过是否与前车保持安全距离来判断车辆的安全性,首先根据车辆obd口输出的前车速度vf,本车的速度ve来计算跟车安全距离l
f-e
(vf,ve),如果obd口输出的前车距离lf《l
f-e
,则开始计时,每0.1秒计算一次,如果接下来的tf秒钟内满足lf《l
f-e
的时间tf《tf0秒,则危险驾驶次数z1值加1,然后时间tf计算值重置,进入下一轮循环计算;如果tf秒内满足lf《l
f-e
的时间小于tf0秒,时间tf清零,z1值不变。
14.优选的,s2中z2具体的计算如下:通过变道时是否与后车保持安全距离来判断车辆的安全性,首先根据obd口输出的车辆车身纵向对称轴到车道线的横向距离来判断车辆是否变道,如果横向距离小于1/2个车身宽度,此时认为车辆在向该车道变道,此时由obd口
输出的该车道的后车速度vr和本车速度ve计算跟车安全距离l
e-r
(ve,vr),如果该车道的后车距离lr《l
e-r
,则危险驾驶次数z2值加1,然后间隔t2秒后,进入下一个计算循环;如果该车道的后车距离lr》=l
e-r
,则过0.1s后再次进入下一循环。
15.优选的,s3中t3具体的计时如下:通过减速度来判断车辆的安全性,时刻从通过obd口读取车辆的减速度信号a,记录a《a1的总时长为t3,其中a1为规定的减速度。
16.优选的,s4中t4具体的计时如下:通过横摆角速度来判断车辆的安全性,时刻从通过obd口读取车辆的横摆信号yawrate和车速,当车速大于40km/h时记录|yawrate|》a2的总时长为t4,其中a2为规定的摇摆角速度。
17.优选的,安全距离计算方法如下:
18.前车和后车制动减速度的选取,应满足以下情况:
19.1)前车选取的减速度应不大于前车当前实际的减速度;
20.2)后车选取的减速度应不大于后车当前的实际减速度,并且在车辆特性满足的前提下,后车选取的减速度不大于前车选取的减速度。
21.反应时间tr,前车静止时间后车静止时间分三段时间考虑:
22.1.1t≤tr,f和e之间的距离为:
[0023][0024]
1.2t》tr[0025]
2.1)若即前车先静止
[0026]
当时,
[0027][0028]
当时,
[0029][0030]
2.2)若即后车先静止:
[0031]
则时
[0032][0033]
2.3)时:即前车在反应时间之内就停止,则后车停止时两车距离最近:
[0034][0035]
即有:对于下式中的任意t,均有s》delta(delta与速度相关)
[0036]
时:
[0037]
时:
[0038][0039]
或时
[0040][0041]
据此可以计算出安全距离l
f-e
。
[0042]
本发明的有益效果是:本发明通过带有adas功能的汽车,以及一些检测装置和采集装置来采集车辆的行车记录以及相关的数据,通过这些数据来计算出,车辆在整年的行驶过程中,是否正常行驶,通过将整年的不规范行驶或者危险驾驶的行为和时间进行计数,并通过一定的计算方式来计算,从而判断驾驶人员驾驶的安全性,来决定来年的保险金额,以此来提高驾驶人员的驾驶习惯,迫使驾驶员培养良好的驾驶习惯减少车辆事故率,提高驾驶人员的安全性,减少后期出险的可能性。
附图说明
[0043]
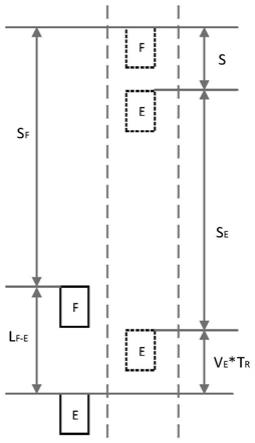
图1为本发明一种新型的汽车保险收费计算方法的模型结构示意图;
具体实施方式
[0044]
下面将结合本发明实施例中的附图,对本发明实施例中的计数方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通计数人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0045]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0046]
本实施案例是一种新型的汽车保险收费计算方法,包括带有adas功能的汽车,汽车中带有探测前后车距离的检测装置,用来采集车辆obd口读取车辆信息的采集单元,具体的通过以下几种情况来计算:
[0047]
s1、通过采集的信息来计算前车保持的距离来判断车辆的安全性,若安全距离超过一定的数值的危险驾驶次数增加,计数z1;
[0048]
s2、通过变道时是否与后车保持安全距离来判断车辆的安全性,如果变道的距离
超过安全距离,则危险驾驶次数增加,计数z2;
[0049]
s3、通过减速度来判断车辆的安全性,若是驾驶车辆突然急刹,且减速度大于一定速度时,则计算刹车急刹车时长,计时t3;
[0050]
s4、通过横摆角速度来判断车辆的安全性,当车速大于一定速度时,则计算超速的时长,计时t4;
[0051]
s5、结合s1-s4的参数来计算最后的总保护费k,具体的计算公式为:k=(k1*(t3+t4)+(z1+z2))*k2+k3,其中k1,k2为比例系数,k3为第二年保费调整最低系数,最终的后一年保费为当年保费乘以系数k。k1,k2均是根据公司需要来决定。
[0052]
s1中z1具体的计算如下:通过是否与前车保持安全距离来判断车辆的安全性,首先根据车辆obd口输出的前车速度vf,本车的速度ve来计算跟车安全距离l
f-e
(vf,ve),如果obd口输出的前车距离lf《l
f-e
,则开始计时,每0.1秒计算一次,如果接下来的tf秒钟内满足lf《l
f-e
的时间tf《tf0秒,则危险驾驶次数z1值加1,然后时间tf计算值重置,进入下一轮循环计算;如果tf秒内满足lf《l
f-e
的时间小于tf0秒,时间tf清零,z1值不变。根据以上的计算方法来计算驾驶人员与前车车辆是否保持安全距离来判断驾驶的安全性,若是驾驶员驾驶经常是危险性驾驶,则说明出现撞车的可能性则会高,因此根据这种危险驾驶次数来决定后一年的保险金额。
[0053]
s2中z2具体的计算如下:通过变道时是否与后车保持安全距离来判断车辆的安全性,首先根据obd口输出的车辆车身纵向对称轴到车道线的横向距离来判断车辆是否变道,如果横向距离小于1/2个车身宽度,此时认为车辆在向该车道变道,此时由obd口输出的该车道的后车速度vr和本车速度ve计算跟车安全距离l
e-r
(ve,vr),如果该车道的后车距离lr《l
e-r
,则危险驾驶次数z2值加1,然后间隔t2秒后,进入下一个计算循环;如果该车道的后车距离lr》=l
e-r
,则过0.1s后再次进入下一循环。根据以上算法来计算出变道时是否后车保持安全距离来判定驾驶的安全性,若是变道时的距离经常不是安全距离,则说明该驾驶员在驾驶过程中,在变道时对其他车辆存放较大的危险,从而可以认定该驾驶人员出现撞车的概率比较大,因此根据这种危险驾驶次数来决定后一年的保险金额。
[0054]
s3中t3具体的计时如下:通过减速度来判断车辆的安全性,时刻从通过obd口读取车辆的减速度信号a,记录a《a1的总时长为t3,其中a1为规定的减速度。在驾驶过程中,会经常出现急刹车的情况,即车辆减速度,若是在驾驶过程中,驾驶人员频繁的进行减速,急刹车,则认定该驾驶人员驾驶计数不行,且会严重影响前后车的驾驶人员,从而可以认定该驾驶人员出现撞车的概率比较大,因此计算急刹车的时间来计算后一年的保险金额,且可能会出现一些不是由于驾驶人员主观原因造成的违规情况,但这种计算方式是集合整一年的时间来计算的,因此这种意外刹车造成的增加时间的情况可以忽略不计,不会影响最后的计算结果。
[0055]
s4中t4具体的计时如下:通过横摆角速度来判断车辆的安全性,时刻从通过obd口读取车辆的横摆信号yawrate和车速,当车速大于40km/h时记录|yawrate|》a2的总时长为t4,其中a2为规定的摇摆角速度。根据横摆角四度来判断,若是速度大于规定的速度,则认定该驾驶人员驾驶计数不行,且会严重影响前后车的驾驶人员,从而可以认定该驾驶人员出现撞车的概率比较大,因此计算急刹车的时间来计算后一年的保险金额,可能会出现一些不是由于驾驶人员主观原因造成的违规情况,但这种计算方式是集合整一年的时间来计
算的,因此这种意外刹车造成的增加时间的情况可以忽略不计,不会影响最后的计算结果。
[0056]
参考图1,安全距离计算方法如下:
[0057]
前车和后车制动减速度的选取,应满足以下情况:
[0058]
1)前车选取的减速度应不大于前车当前实际的减速度;
[0059]
2)后车选取的减速度应不大于后车当前的实际减速度,并且在车辆特性满足的前提下,后车选取的减速度不大于前车选取的减速度。
[0060]
反应时间tr,前车静止时间,后车静止时间,分三段时间考虑:
[0061]
1.1t≤tr,f和e之间的距离为:
[0062][0063]
1.2t》tr[0064]
2.1)若即前车先静止
[0065]
当时,
[0066][0067]
当时,
[0068][0069]
2.2)若即后车先静止:
[0070]
则时
[0071][0072]
2.3)时:即前车在反应时间之内就停止,则后车停止时两车距离最近:
[0073][0074]
即有:对于下式中的任意t,均有s》delta(delta与速度相关)
[0075]
时:
[0076]
时:
[0077][0078]
或时
[0079][0080]
据此可以计算出安全距离l
f-e
。
[0081]
本发明的有益之处,本发明通过带有adas功能的汽车,以及一些检测装置和采集装置来采集车辆的行车记录以及相关的数据,通过这些数据来计算出,车辆在整年的行驶过程中,是否正常行驶,通过将整年的不规范行驶或者危险驾驶的行为和时间进行计数,并通过一定的计算方式来计算,从而判断驾驶人员驾驶的安全性,来决定来年的保险金额,以此来提高驾驶人员的驾驶习惯,迫使驾驶员培养良好的驾驶习惯减少车辆事故率,提高驾驶人员的安全性,减少后期出险的可能性。
[0082]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本计数领域的计数人员在本发明揭露的计数范围内,根据本发明的计数方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1