一种改进的线谱自动提取方法与流程
1.本发明涉及水声学和水声信号处理的目标线谱检测和特征提取技术领域,具体领域为一种改进的线谱自动提取方法。
背景技术:
2.被动声纳目标分类识别作为潜艇、水面舰和岸基警戒等声纳系统的主要功能,是各国重点发展的技术领域,具有重要的军事应用价值,其性能的优劣是海军作战能力强弱的重要体现。目前,被动目标分类识别主要通过对目标辐射噪声进行分析,提取表征目标物理属性的功率谱和调制谱等相关特征来实现的。舰船辐射噪声功率谱由线谱与连续谱组成,其中线谱产生于目标齿轮、活塞、螺旋桨、船体等机械产生的振动,直接反应了目标的物理特征,是被动声纳目标分类识别的重要依据之一。线谱特征的自动提取在声纳装备自动化与智能化上有重要意义,特征提取的优劣直接关系到目标识别的准确率。
3.目前发展较成熟、应用较广泛的线谱特征提取方法有信噪比门限法、似然比检测、非线性混沌振子等,但以上方法局限于提取单个信号处理周期的线谱特征,当目标线谱较稳定,频率信噪比变化较小时,上述算法能够获得较好的效果。但现实中,由于舰船目标工况变化、运动状态变化、水声信道变化、环境噪声起伏等原因,目标线谱的频率、信噪比呈现时变特性,此时会出现线谱展宽、频率漂移、轨迹不连续等问题,为目标线谱特征估计带来了较大的困难。仅依靠短时线谱特征提取方法难以获取线谱的一些长时特征如频率位置稳定性、线谱强度稳定性、线谱偏移速度,制约了多普勒速度估计、谐波序列判别等后置处理的进行。
4.这里提出了一种改进的线谱自动提取方法,该方法利用信噪比门限法提取功率谱中的短时线谱,在此基础上,利用线谱关联算法与卡尔曼滤波算法对每个信号处理周期提取的线谱进行关联和跟踪,更新线谱频率位置和变化速度。该方法具体包括预跟踪、稳定跟踪、跟踪丢失、跟踪续接等环节,有效解决了虚警线谱过滤、低信噪比线谱检测、频率不稳定线谱跟踪等问题。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种改进的线谱自动提取方法。
6.为实现上述目的,本发明提供如下技术方案:一种改进的线谱自动提取方法,其特征在于:其步骤为:
7.步骤一:lofar谱分析,对接收的舰船辐射噪声数据x(i),i=1,2,...,n,经低通滤波、降采样、数据累积、傅里叶变换、非相干累积得到功率谱x(f);
8.步骤二:线谱检测,首先采用双通分离窗方法估计功率谱的连续谱,再根据连续谱进行线谱提取,线谱提取方法为信噪比门限法,最终得到提取的瞬时线谱集合fline;
9.步骤三:对跟踪线谱集合trackf中的每条跟踪线谱,对其中任意的线谱f,根据提
取的线谱集合fline匹配观测值fm,利用fm进行卡尔曼滤波,同时令fline=fline/fm;最后删除trackf中跟踪丢失次数过多的线谱;
10.步骤四:对预跟踪线谱集合candif中的每条跟踪线谱,对其中任意的线谱f,根据提取的线谱集合fline匹配观测值fm,利用fm进行卡尔曼滤波,并令fline=fline/fm,此时若该线谱达到一定条件,则将其转移至跟踪集合trackf;其次删除candif中跟踪丢失次数过多的线谱,最后将剩余的fline加入到预跟踪集合candif;
11.步骤五:将跟踪线谱集合trackf中的线谱特征信息作为结果输出。
12.2.根据权利要求1所述的一种改进的线谱自动提取方法,其特征在于:步骤一的具体过程为:
13.①
低通滤波和降采样,根据声纳的采样频率、工作频段以及要分析的低频频段,选取合适的低通滤波器对接收信号进行滤波,得到滤波后的信号y1(i),i=1,2,...,n,在对其进行降采样得到y2(i),i=1,2,...,n/d:
[0014][0015]
y2(i)=y1(1:d:n),i=1,2,...,n/d
[0016]
其中,d为降采样倍数;
[0017]
②
功率谱分析,数据累积至nfft点,并对累积数据进行功率谱分析,
[0018][0019]
其中,k为累积批次,x(f)即为lofar谱分析结果。
[0020]
3.根据权利要求1所述的一种改进的线谱自动提取方法,其特征在于:步骤二的具体过程为:
[0021]
①
利用双通分离窗算法对lofar谱进行连续谱估计:
[0022]
根据双通分离窗参数m、l确定滑动窗如下:
[0023][0024][0025]
其中wintpsw为双通分离窗,win1为全1窗;
[0026]
用双通分离窗wintpsw对lofar谱x(f)进行滑动平均:
[0027][0028]
|b=max(-m-l,1-j),e=min(m+l,n-j)
[0029]
上式中n为x(f)的长度,对x1(f)进行极值处理:
[0030][0031]
同理再用全1窗win1对x2(f)进行滑动平均得到平滑谱xs(f);
[0032]
最后计算lofar谱各频点信噪比:
[0033]
xsnr(i)=10log 10((x(i)-xs(i))/xs(i))
[0034]
②
根据信噪比向量xsnr(f)进行线谱检测提取,主要过程如下:
[0035]
谱峰识别,谱峰位置i处是一个极大值点,既存在左边界又存在右边界,且保证其左斜率和右斜率均大于斜率门限td,即
[0036]
d-(i)≥td且d
+
(i)≥td
[0037]
卡峰高门限,滤除峰高低于峰高门限hp的谱峰;
[0038]
卡峰宽门限,滤除谱峰宽度大于峰宽门限bw的谱峰;
[0039]
最终得到线谱集合fline。
[0040]
4.根据权利要求1所述的一种改进的线谱自动提取方法,其特征在于:步骤三的具体过程为:
[0041]
①
观测值获取:计算其卡尔曼滤波预测值为f
p
,查找是否存在f
*
∈fline,使得|f
*-f
p
|<deltavalve,若存在,则跟踪线谱f
t
的观测值为f
*
;否则观测值缺失,此时令最后令fline=fline/f
*
,
[0042]
②
计数更新:若观测值则f
t
的跟踪计数器tcount=tcount-1;否则tcount=min(tcount+1,maxcount),若tcount<trackvalve,则将该跟踪信息从跟踪集合中删除,
[0043]
③
卡尔曼滤波:对f
t
跟踪线谱进行卡尔曼滤波,
[0044]
线谱跟踪卡尔曼滤波参数及更新方法如下:
[0045]
线谱跟踪的卡尔曼滤波状态变量:x=[x,v]
t
,分别表示频率位置、频率变化速度,
[0046]
预测模型:其中状态转移矩阵wk为预测模型误差,状态转移协方差矩阵
[0047]
观测模型:zk=hxk+vk,其中观测转移矩阵h=[1,0],vk为观测噪声,观测噪声方差r=0.01,
[0048]
卡尔曼更新公式为:
[0049]
p
t-=φp
t-1
φ
t
+q
[0050]kt
=p
t-h
t
(hp
t-h
t
+r)-1
[0051][0052][0053]
其中k为卡尔曼增益,p为状态协方差矩阵,初始状态其中k为卡尔曼增益,p为状态协方差矩阵,初始状态即为最终的卡尔曼估计结果,若观测值缺失,则有:
[0054][0055]
5.根据权利要求1所述的一种改进的线谱自动提取方法,其特征在于:步骤四的具体过程为:
[0056]
①
观测值获取:与跟踪集合更新过程一致。
[0057]
②
计数更新:若观测值则f
t
的跟踪计数器tcount=tcount-1,此时若tcount<candivalve,则将该跟踪信息从预跟踪集合中删除;若则tcount=tcount
+1,此时若tcount>provalve,则将该跟踪信息移入跟踪集合。
[0058]
③
卡尔曼滤波:与跟踪集合更新过程一致。
[0059]
④
对fline中剩余的每条线谱fr,按照上文介绍的卡尔曼滤波参数设置方法进行初始化,并加入到预跟踪集合。
[0060]
与现有技术相比,本发明的有益效果是:(1)针对虚警线谱干扰问题,该方法在线谱预跟踪阶段会对各提取的瞬时线谱进行成迹检测,可有效过滤噪声引起的虚警线谱。
[0061]
(2)针对线谱提取过程中目标线谱频率漂移的问题,该方法利用卡尔曼滤波原理,根据线谱频率的位置和速度进行卡尔曼滤波建模,将线谱预测值和线谱瞬时提取值进行信息融合,实现变化线谱的稳定跟踪。
[0062]
(3)针对线谱时隐时现的问题,该方法具有线谱短时续接机制,能够暂时保留中断的线谱轨迹并预测其频率变化,当其在一定时间内再次出现时进行同一性认定,实现线谱轨迹续接。
[0063]
(4)仿真和实际海试数据分析结果表明:本发明所提方法能有效地过滤虚警线谱噪声,同时对频率、信噪比不稳定的线谱进行跟踪,最终统计得到其相关长时特征。为目标分类识别提供有力支撑。
附图说明
[0064]
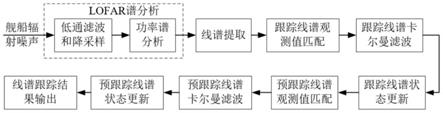
图1为本发明的实现流程框图;
[0065]
图2为仿真1目标线谱跟踪结果;
[0066]
图3为仿真1线谱跟踪接续示例;
[0067]
图4为仿真1线谱跟踪滤噪效果;
[0068]
图5为仿真2目标线谱跟踪结果;
[0069]
图6为实际目标1(商船)lofar历程图;
[0070]
图7为实际目标1(商船)线谱提取跟踪结果;
[0071]
图8为实际目标2(商船)lofar历程图;
[0072]
图9为实际目标2(商船)线谱跟踪提取结果。
具体实施方式
[0073]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0074]
本发明提供一种技术方案:一种改进的线谱自动提取方法,本发明是实现流程框图如图1所示,具体实现过程如下:
[0075]
步骤一:lofar谱分析。对接收的舰船辐射噪声数据x(i),i=1,2,...,n,经低通滤波、降采样、数据累积、傅里叶变换、非相干累积得到功率谱x(f)。
[0076]
步骤二:线谱检测。首先采用双通分离窗方法估计功率谱的连续谱,再根据连续谱进行线谱提取,线谱提取方法为信噪比门限法,最终得到提取的瞬时线谱集合fline。
[0077]
步骤三:对跟踪线谱集合trackf中的每条跟踪线谱,对其中任意的线谱f,根据提
取的线谱集合fline匹配观测值fm,利用fm进行卡尔曼滤波,同时令fline=fline/fm;最后删除trackf中跟踪丢失次数过多的线谱。
[0078]
步骤四:对预跟踪线谱集合candif中的每条跟踪线谱,对其中任意的线谱f,根据提取的线谱集合fline匹配观测值fm,利用fm进行卡尔曼滤波,并令fline=fline/fm,此时若该线谱达到一定条件,则将其转移至跟踪集合trackf;其次删除candif中跟踪丢失次数过多的线谱。最后将剩余的fline加入到预跟踪集合candif。
[0079]
步骤五:将跟踪线谱集合trackf中的线谱特征信息作为结果输出。
[0080]
通过本技术方案,(一)实施过程:
[0081]
本发明具体实施过程如下:
[0082]
1)接收目标辐射噪声时域波形数据x(i),i=1,2,...,n,对其进行lofar谱分析,具体过程如下:
[0083]
①
低通滤波和降采样。根据声纳的采样频率、工作频段以及要分析的低频频段,选取合适的低通滤波器对接收信号进行滤波,得到滤波后的信号y1(i),i=1,2,...,n,在对其进行降采样得到y2(i),i=1,2,...,n/d:
[0084][0085]
y2(i)=y1(1:d:n),i=1,2,...,n/d
[0086]
其中,d为降采样倍数。
[0087]
②
功率谱分析。数据累积至nfft点,并对累积数据进行功率谱分析,
[0088][0089]
其中,k为累积批次,x(f)即为lofar谱分析结果。
[0090]
2)线谱检测提取。
[0091]
①
利用双通分离窗算法对lofar谱进行连续谱估计:
[0092]
根据双通分离窗参数m、l确定滑动窗如下:
[0093][0094][0095]
其中wintpsw为双通分离窗,win1为全1窗。
[0096]
用双通分离窗wintpsw对lofar谱x(f)进行滑动平均:
[0097][0098]
|b=max(-m-l,1-j),e=min(m+l,n-j)
[0099]
上式中n为x(f)的长度。对x1(f)进行极值处理:
[0100][0101]
同理再用全1窗win1对x2(f)进行滑动平均得到平滑谱xs(f)。
[0102]
最后计算lofar谱各频点信噪比:
[0103]
xsnr(i)=10log 10((x(i)-xs(i))/xs(i))
[0104]
②
根据信噪比向量xsnr(f)进行线谱检测提取,主要过程如下:
[0105]
谱峰识别。谱峰位置i处是一个极大值点,既存在左边界又存在右边界,且保证其左斜率和右斜率均大于斜率门限td,即
[0106]
d-(i)≥td且d
+
(i)≥td
[0107]
卡峰高门限,滤除峰高低于峰高门限hp的谱峰。
[0108]
卡峰宽门限,滤除谱峰宽度大于峰宽门限bw的谱峰。
[0109]
最终得到线谱集合fline。
[0110]
3)更新跟踪集合trackf:
[0111]
遍历跟踪集合trackf,对任意的跟踪线谱f
t
∈trackf:
[0112]
①
观测值获取:计算其卡尔曼滤波预测值为f
p
,查找是否存在f
*
∈fline,使得|f
*-f
p
|<deltavalve,若存在,则跟踪线谱f
t
的观测值为f
*
;否则观测值缺失,此时令最后令fline=fline/f
*
。
[0113]
②
计数更新:若观测值则f
t
的跟踪计数器tcount=tcount-1;否则tcount=min(tcount+1,maxcount)。若tcount<trackvalve,则将该跟踪信息从跟踪集合中删除。
[0114]
③
卡尔曼滤波:对f
t
跟踪线谱进行卡尔曼滤波。
[0115]
线谱跟踪卡尔曼滤波参数及更新方法如下:
[0116]
线谱跟踪的卡尔曼滤波状态变量:x=[x,v]
t
,分别表示频率位置、频率变化速度。
[0117]
预测模型:其中状态转移矩阵wk为预测模型误差。状态转移协方差矩阵
[0118]
观测模型:zk=hxk+vk,其中观测转移矩阵h=[1,0],vk为观测噪声,观测噪声方差r=0.01。
[0119]
卡尔曼更新公式为:
[0120]
p
t-=φp
t-1
φ
t
+q
[0121]kt
=p
t-h
t
(hp
t-h
t
+r)-1
[0122][0123][0124]
其中k为卡尔曼增益。p为状态协方差矩阵,初始状态其中k为卡尔曼增益。p为状态协方差矩阵,初始状态即为最终的卡尔曼估计结果。若观测值缺失,则有:
[0125][0126]
4)更新预跟踪集合ptrackf:
[0127]
遍历跟踪集合ptrackf,对任意的跟踪线谱fc∈ptrackf:
[0128]
①
观测值获取:与跟踪集合更新过程一致。
[0129]
②
计数更新:若观测值则f
t
的跟踪计数器tcount=tcount-1,此时若
tcount<candivalve,则将该跟踪信息从预跟踪集合中删除;若则tcount=tcount+1,此时若tcount>provalve,则将该跟踪信息移入跟踪集合。
[0130]
③
卡尔曼滤波:与跟踪集合更新过程一致。
[0131]
④
对fline中剩余的每条线谱fr,按照上文介绍的卡尔曼滤波参数设置方法进行初始化,并加入到预跟踪集合。
[0132]
5)将跟踪集合中的跟踪线谱特征信息输出,为后续目标识别等过程提供支撑。
[0133]
(二)仿真及海试数据测试结果
[0134]
在“(一)实施过程”的基础上,通过仿真和录取的实际海试数据进行分析处理,给出本发明的处理结果,仿真处理如附图2~5所示,录取商船目标实际海试处理结果如附图6~9所示。
[0135]
计算机仿真1:仿真中包含1个目标,目标具有4根线谱,中心频率分别为20hz、80hz、160hz、240hz,线谱频率以余弦规律变化,线谱平均信噪比为5db。由附图2结果可以看出,该目标线谱的频率变化较大,对于同一根线谱,仅依靠传统的线谱检测方法将提取多个线谱值。而采用本发明所提的线谱自动提取方法,可以对频率不稳定的线谱进行持续跟踪。附图3结果表明当检测的线谱轨迹存在中断情况时,该方法能够进行频率预测与轨迹接续,保障跟踪的稳定性。附图4结果表明,该方法能够滤除传统线谱检测所提取的虚警线谱,大幅降低线噪声线谱数量,增强后续目标识别的可靠性。
[0136]
计算机仿真2:仿真中包含1个目标,目标具有3根线谱,中心频率分别为1000hz、1003hz、1006hz,线谱平均信噪比为10db,线谱以余弦规律变化,且变化规律一致。由附图5(a)可以看出,目标的线谱频率比较接近且变化较大,该情况对线谱跟踪带来较大的困难。若跟踪方法设计不合理,将容易出现相邻线谱误跟踪的现象,即某条线谱a的跟踪轨迹偏移到相邻的线谱b轨迹上;附图5(b)给出了线谱误跟踪的示例。附图5(c)为本发明所提的线谱自动提取方法的跟踪结果,该结果表明该方法能够有效防止相邻线谱误跟踪的问题。
[0137]
海试数据处理1:实际录取的某海试数据,数据中包含有商船目标信号。由海试数据处理结果可以看出,对于实际目标谱图中信噪比较弱、轨迹中断较多的线谱,基于卡尔曼滤波的线谱自动跟踪方法能够对其进行持续稳定的跟踪,对谱图中存在的噪声线谱进行有效的过滤,起到了线谱干扰净化的作用。
[0138]
海试数据处理2:实际录取的某海试数据,数据中包含有商船目标信号。由海试数据处理结果可以看出,对于实际目标谱图中频率变化较大、线谱轨迹中断较大的线谱,基于卡尔曼滤波的线谱自动跟踪方法能够对其进行持续稳定的跟踪。
[0139]
上述的仿真分析和海试数据处理结果表明:本发明所提的线谱自动提取方法能够有效滤除虚警噪声线谱,实现线谱的干扰净化功能;同时,该方法可有效实现对信噪比较弱、轨迹时断时续、频率变化较大的线谱进行稳定跟踪,且对多条频率接近且变化较大的谐波线谱能进行独立准确的跟踪,避免误跟踪问题;该方法最终能实现线谱长时特征自动提取,为后续目标分类识别提供了有力的支撑,具有较好的应用前景。
[0140]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1