一种机车轮对踏面剥离识别方法与流程
1.本发明涉及机车识别领域,尤其涉及一种机车轮对踏面剥离识别方法。
背景技术:
2.现有的机车轮对踏面剥离识别方法通常利用光电技术非接触测量踏面缺陷的方法。用精密的激光位移传感器对踏面进行快速扫描,采集值经过处理后转换为数字图像,再通过传统的信号处理技术识别表面是否存在缺陷。这种识别方法需要精密激光位移传感器,造价高,应用场合限制。需要用到传统信号处理方法,会受到环境干扰,需要人工干预检测,识别速度慢。
技术实现要素:
3.本发明提供一种机车轮对踏面剥离识别方法,以克服现有的剥离识别方法识别速度慢等技术问题。
4.为了实现上述目的,本发明的技术方案是:
5.一种机车轮对踏面剥离识别方法,包括以下步骤:
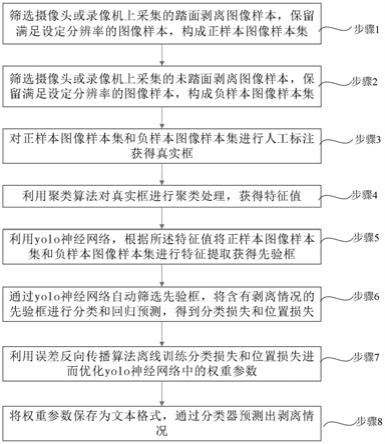
6.步骤1、筛选摄像头或录像机上采集的踏面剥离图像样本,保留满足设定分辨率的图像样本,构成正样本图像样本集;
7.步骤2、筛选摄像头或录像机上采集的未踏面剥离图像样本,保留满足设定分辨率的图像样本,构成负样本图像样本集;
8.步骤3、对正样本图像样本集和负样本图像样本集进行人工标注获得真实框;
9.步骤4、利用聚类算法对真实框进行聚类处理,获得特征值;
10.步骤5、利用yolo神经网络,根据所述特征值将正样本图像样本集和负样本图像样本集进行特征提取获得先验框;
11.步骤6、通过yolo神经网络自动筛选先验框,将含有剥离情况的先验框进行分类和回归预测,得到分类损失和位置损失;
12.步骤7、利用误差反向传播算法离线训练分类损失和位置损失进而优化yolo神经网络中的权重参数;
13.步骤8、将权重参数保存为文本格式,通过分类器预测出剥离情况。
14.进一步的,所述步骤6中得到位置损失具体方法为:通过逻辑回归预测出先验框与真实框的偏移量,再通过交并补运算得到真实框与先验框之间的iou值,即位置损失。
15.进一步的,计算iou值的公式为:
[0016][0017]
其中,j(a,b)为真实框与先验框之间的iou值,|a∩b|为真实框的iou值,|a∪b|为先验框的iou值。
[0018]
进一步的,步骤4中具体为:利用聚类算法对真实框进行聚类处理,使真实框划分
为不同网格,每个网格生成不同规格的先验框。
[0019]
进一步的,步骤5中通过yolo神经网络卷积对正样本图像样本集和负样本图像样本集进行不同倍数的卷积采样,得到不同尺寸的先验框。
[0020]
有益效果:本发明仅基于yolo模型进行训练和检测,检测速度快,准确率高,仅通过固定的摄像头或录像机就能进行检测,不需要精密的光学仪器,避免了环境中的噪声、热干扰、电磁波干扰等环境因素对预测结果产生的影响,同时摄像头和录像机能够自动捕捉发生剥离的区域,不需要人工干预,极大的节约了资源和时间成本。
附图说明
[0021]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0022]
图1为本发明机车轮对踏面剥离识别方法流程图。
具体实施方式
[0023]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0024]
本实施例提供了一种机车轮对踏面剥离识别方法,如图1,包括以下步骤:
[0025]
一种机车轮对踏面剥离识别方法,其特征在于,包括以下步骤:
[0026]
步骤1、筛选摄像头或录像机上采集的踏面剥离图像样本,保留满足设定分辨率的图像样本,构成正样本图像样本集;
[0027]
步骤2、筛选摄像头或录像机上采集的未踏面剥离图像样本,保留满足设定分辨率的图像样本,构成负样本图像样本集;
[0028]
步骤3、对正样本图像样本集和负样本图像样本集进行人工标注获得真实框;
[0029]
步骤4、利用聚类算法对真实框进行聚类处理,获得不同的大小和尺寸值,即特征值;
[0030]
步骤5、利用yolo神经网络,根据所述特征值将正样本图像样本集和负样本图像样本集进行特征提取获得先验框;
[0031]
步骤6、通过yolo神经网络自动筛选先验框,将含有剥离情况的先验框进行分类和回归预测,得到分类损失和位置损失;
[0032]
步骤7、利用误差反向传播算法离线训练分类损失和位置损失进而优化yolo神经网络中的权重参数;
[0033]
步骤8、将权重参数保存为文本格式,通过分类器预测出剥离情况。
[0034]
在具体实施例中,所述步骤6中得到位置损失具体方法为:通过逻辑回归预测出先验框与真实框的偏移量,再通过交并补运算得到真实框与先验框之间的iou值,即位置损失。
[0035]
在具体实施例中,计算iou值的公式为:
[0036][0037]
其中,j(a,b)为真实框与先验框之间的iou值,|a∩b|为真实框的iou值,|a∪b|为先验框的iou值。
[0038]
在具体实施例中,步骤4中具体为:利用聚类算法对真实框进行聚类处理,使真实框划分为不同网格,每个网格生成不同规格的先验框。首先将得到的真实框划分为13*13个网格,每个网格会生成长宽不同,大小不同的9个先验框。先验框的大小由k-means聚类算法对所有预测框的长宽聚类得到;每个先验框都会预测三类值:1.位置信息包括中心坐标tx和ty,框的宽和长;2.有无目标预测;3.所属正负样本的剥离情况;
[0039]
在具体实施例中,步骤5中通过yolo神经网络卷积对正样本图像样本集和负样本图像样本集进行不同倍数的卷积采样,得到不同尺寸的先验框;具体的,步骤5中通过多层卷积神经网络得到32倍,16倍,8倍三次不同大小的采样,获得不同尺寸先验框,每个先验框所对应的感受野不同,这样对所获得的不规整数据集做目标检测十分有利,可以确定数据中不同大小的目标种类。
[0040]
在实际剥离过程中,只有第一次采集的正样本图像样本集和负样本图像样本集需要人工标注,由于人工标注已经训练好yolo神经网络,所以后续再进行预测无需人工标注,采集正样本图像样本集和负样本图像样本集后即可识别剥离情况。
[0041]
项目yolo-v3准确率91.5%精确率89.52%召回率94%假正率11%真正率94%f-measure91.69%
[0042]
表1:剥离识别准确率统计表
[0043]
表1为应用本发明的剥离识别方法获得的识别准确率统计表,由表1可知应用本技术后,剥离识别准确率和真正率高,对发生剥离处的识别效果良好。
[0044]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1