一种基于深度学习和探地雷达的果树根系识别与定位方法
1.本发明涉及对植物根系的无损探测领域,特别涉及一种基于深度学习和探地雷达的果树根系识别与定位方法。
背景技术:
2.根系是植物的根本,是树体整体发育的基础和中心,果树生长主要依靠根系为其提供所必需的养分。对果树根系的生长状态以及的空间分布规律进行研究,是果树养根、护根工作的基础,同时有利于更好地指导精准施肥,精确灌溉等工作,提高水肥利用效率和果树产量。
3.根系分布于地下,结构复杂、而且传统的根系探测方法,比如挖掘法、土钻法,具有费时费力,会对植物根系和土壤环境进行破坏,无法对根系进行长时间、重复的探测和研究等缺点,而一些根系原位无损或低损的测量技术,如微根窗管法、高分辨x射线断层扫描(ct)、核磁共振成像(nmr)等技术探测范围较小且花费较大。探地雷达具有迅速性、无损性、可重复性,被广泛应用于植物根系的探测。为了进一步了解果树根系统结构,通常需要对果树根系统结构进行识别与定位。
4.因此,为了全面了解果树根系系统结构,如何对植物根系系统结构进行识别与定位,提高工作效率,降低现有技术操作的复杂性,成为同行从业人员亟待解决的问题。
技术实现要素:
5.本发明的主要目的在于提供一种至少部分解决上述技术问题的基于深度学习和探地雷达的果树根系识别与定位方法,能够在不破坏根系以及周围土壤环境的条件下对果树根系进行识别和定位。
6.为实现上述目的,本发明采取的技术方案为:
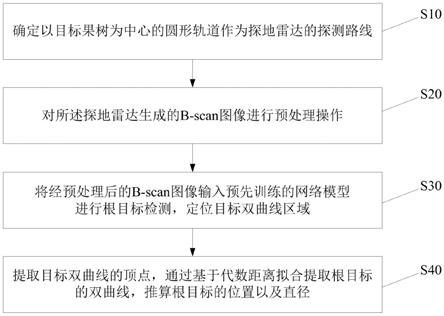
7.本发明提供一种基于深度学习和探地雷达的果树根系识别与定位方法,包括:
8.s10、确定以目标果树为中心的圆形轨道作为探地雷达的探测路线;
9.s20、对所述探地雷达生成的b-scan图像进行预处理操作;
10.s30、将经预处理后的b-scan图像输入预先训练的网络模型进行根目标检测,定位目标双曲线区域;
11.s40、提取目标双曲线的顶点,通过基于代数距离拟合提取根目标的双曲线,推算根目标的位置以及直径。
12.进一步地,步骤s10包括:
13.规划以果树为中心的等间距的数个同心圆轨道,作为探地雷达的探测路线。
14.进一步地,步骤s20包括:
15.对所述探地雷达生成的b-scan图像依次进行零点校正、背景去除、直达波去除、图像增益和图像滤波处理操作。
16.进一步地,步骤s30中网络模型的训练过程包括:
17.s31、构建数据集;所述数据集包括:通过在土槽实验室进行条件可控的根茎预埋试验以及实地探测果树根系试验收集的根真实图像;通过仿真软件得到根仿真图像;通过循环对抗生成网络cyclegan制作的根转换图像;
18.s32、基于所述数据集,对改进的yolov5s深度学习网络模型进行迭代训练,获得进行根目标检测的网络模型;所述改进的yolov5s深度学习网络模型所包括的主干网络引入注意力机制,并在focus结构之后加入cbam模块。
19.进一步地,循环对抗生成网络cyclegan由两个完全一致的gan网络组成的一种环形网络,包括两个结构相同的生成器,两个结构相同的判别器;
20.以真实图像作为源域样本空间a,以仿真图像作为目标域样本空间b,通过生成器和判别器之间的对抗训练,学习数据集图片的像素分布概率来生成新的图片,实现两个样本空间之间的风格转换,以此对数据集进行数据增强。
21.进一步地,步骤s40包括:
22.s41、对所述目标双曲线区域进行图像分割和边缘处理,根据双曲线对称性提取顶点,利用顶点坐标定位根系位置;
23.s42、利用基于代数距离拟合算法拟合目标双曲线,提取双曲线参数,利用其参数估算根茎的直径。
24.进一步地,步骤s41中,对所述目标双曲线区域进行图像分割包括:
25.利用k-means算法对所述目标双曲线区域图像进行分割,设定聚类中心数目为k=2,将图像分为目标双曲线以及背景两类;
26.计算其他样本点与聚类中心的欧式距离,选择欧式距离最小的聚类中心,归类到该中心所在的簇类中;
27.计算当前每个聚类簇的平均值,并将其作为下一次迭代的聚类中心;计算当前聚类中心与下一次迭代的聚类中心的距离,若小于阈值,则完成迭代,否则重新分配样本点到距离最近的新簇类中。
28.进一步地,步骤s42包括:
29.根据探地雷达的工作方式,利用几何关系得:
[0030][0031]
其中,v表示电磁波在土壤中的传播速度,x表示水平位置,t表示回波时延,ti表示位于xi的回波时延;(x0,t0)表示顶点位置,xi表示采样点水平位置,r表示根茎半径;将(1)式进行变化得二次曲线方程如下:
[0032][0033]
利用基于代数距离拟合算法对雷达图像中的目标进行拟合,双曲线表达式拟合为带约束条件的隐式二阶多项式:
[0034]
f(p,x)=p
·
x=ax2+bxt+ct2+dx+et+f=0
ꢀꢀꢀ
(3)
[0035]
其中,p=[a,b,c,d,e,f]
t
,x=(x2,xt,t2,x,t,1);
[0036]
对于选定的n个离散采样点xi=(xi,ti),n=1...n,用s(p,x)表示曲线到各点的代数距离的平方的最小值,其定义如下:
[0037][0038]
通过双曲线顶点以及双曲线开口向下的特征,确立约束条件:
[0039]
双曲线顶点位置的双程走时最短,即:t0≤min(ti);顶点位置位于开口范围之内,即:x
l
≤x0≤xr,x
l
表示顶点左侧采样点的水平位置,xr表示顶点右侧采样点的水平位置;
[0040]
通过计算b
2-4ac的值确立曲线的形状,在该双曲线模型中:b=0,4ac=-1;通过基于代数距离算法得到双曲线隐式二阶多项式之后,根据下式对根茎半径进行估算:
[0041][0042]
(5)式中,r表示根茎半径,e为式(3)中的参数;v表示电磁波在土壤中的传播速度。
[0043]
与现有技术相比,本发明具有如下有益效果:
[0044]
一种基于深度学习和探地雷达的果树根系识别与定位方法,包括:确定以目标果树为中心的圆形轨道作为探地雷达的探测路线;对所述探地雷达生成的b-scan图像进行预处理操作;将经预处理后的b-scan图像输入预先训练的网络模型进行根目标检测,定位目标双曲线区域;提取目标双曲线的顶点,通过基于代数距离拟合提取根目标的双曲线,推算根目标的位置以及直径。该方法能够在不破坏根系以及周围土壤环境的条件下对果树根系进行识别和定位,探测范围可控,方法操作比较简便,相比传统方法,可显著提高工作效率,且识别和定位准确率高。
附图说明
[0045]
图1为本发明实施例提供的基于深度学习和探地雷达的果树根系识别与定位方法流程图;
[0046]
图2为本发明实施例提供的探地雷达的探测路线示意图;
[0047]
图3a为本发明实施例提供的预处理操作之前的效果图;
[0048]
图3b为本发明实施例提供的预处理操作之后的效果图;
[0049]
图4为本发明实施例提供的循环对抗生成网络模型结构图;
[0050]
图5a-5b均为本发明实施例提供的a域样本数据示意图;
[0051]
图5c-5d均为本发明实施例提供的b域样本数据示意图;
[0052]
图5e-5f均为本发明实施例提供的转换结果图像示意图;
[0053]
图6为yolov5s网络模型图;
[0054]
图7为本发明实施例提供的改进后的主干网络的模型图;
[0055]
图8为本发明实施例提供的yolov5s目标检测结果示意图;
[0056]
图9为本发明实施例提供的目标双曲线拟合结果图。
具体实施方式
[0057]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合
具体实施方式,进一步阐述本发明。
[0058]
在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0059]
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0060]
参照图1所示,本发明提供的一种基于深度学习和探地雷达的果树根系识别与定位方法,包括:
[0061]
s10、确定以目标果树为中心的圆形轨道作为探地雷达的探测路线;
[0062]
s20、对所述探地雷达生成的b-scan图像进行预处理操作;
[0063]
s30、将经预处理后的b-scan图像输入预先训练的网络模型进行根目标检测,定位目标双曲线区域;
[0064]
s40、提取目标双曲线的顶点,通过基于代数距离拟合提取根目标的双曲线,推算根目标的位置以及直径。
[0065]
该方法能够在不破坏根系以及周围土壤环境的条件下对果树根系进行识别和定位,探测范围可控,方法操作比较简便,相比传统方法,可显著提高工作效率,且识别和定位准确率高。
[0066]
下面分别对上述各个步骤进行详细的说明:
[0067]
上述步骤s10中:规划探测路线,如图2所示,选取以果树为中心的、等间距的数个同心圆轨道作为探地雷达的探测路线,比如假设果树树干直径为30cm,则将等间距设为30cm,设定多个等间距的数个同心圆轨道;其中,最内圈的轨道与果树也相距30cm。等间距参数可根据果树树干的直径进行确定,二者正相关。圆形轨道能够使探地雷达的探测方向与根茎走向尽可能保持垂直,使其探测更加精准。
[0068]
步骤s20中:对探地雷达的b-scan图像进行预处理操作,主要包括:零点校正、背景去除、直达波去除、图像增益、图像滤波等操作,可依次进行,预处理效果图如图3a-3b所示。
[0069]
步骤s30中,网络模型的训练过程包括:
[0070]
s31、构建数据集;所述数据集包括:通过在土槽实验室进行条件可控的根茎预埋试验以及实地探测果树根系试验收集的根真实图像;通过仿真软件得到根仿真图像;通过循环对抗生成网络cyclegan制作的根转换图像;
[0071]
s32、基于所述数据集,对改进的yolov5s深度学习网络模型进行迭代训练,获得进行根目标检测的网络模型;所述改进的yolov5s深度学习网络模型所包括的主干网络引入注意力机制,并在focus结构之后加入cbam模块。
[0072]
构建数据集。数据集主要包括:通过在土槽实验室进行条件可控的根茎预埋试验以及实地探测果树根系试验收集的真实图像;通过仿真软件gprmax得到仿真图像;通过循
环对抗生成网络cyclegan制作的转换图像。其中,比如真实图片500张,仿真图片800张,cyclegan的转换图像200张,按0.8:0.2将数据集划分成训练集和验证集。使用labelimg软件对图像数据进行标注。
[0073]
循环对抗生成网络cyclegan是由两个完全一致的gan网络组成的一种环形网络,其网络结构如图4所示,两个生成器fa→b,fb→a的结构完全相同,两个判别器ga→b,gb→a也是如此。以真实图像作为源域样本空间a,以仿真图像作为目标域样本空间b,通过生成器和判别器之间的对抗训练,学习数据集图片的像素分布概率来生成新的图片,实现两个样本空间之间的风格转换,以此对数据集进行数据增强;其转换效果如图5a-5f所示。
[0074]
步骤s32中,改进yolov5s,利用改进的yolov5s深度学习网络模型进行目标检测,定位目标双曲线区域。yolov5s的深度学习网络模型如图6所示,主要包括主干网络(backbone)、颈部网络(neck)、输出网络。其中主要对主干网络进行改进,原有的主干网络包括focus结构、csp结构、spp结构以及conv结构,在原有的基础上引入注意力机制,在focus结构之后的第一个卷积网络后加入cbam模块,如图7所示。conv_cbam模块即为标准卷积层和cbam模块的结合。
[0075]
利用改进的yolov5s对在探地雷达b-scan图上根目标反射形成的双曲线进行检测,形成包含目标的感兴趣区域,其结果如图8所示。
[0076]
上述步骤s40包括:
[0077]
s41、对所述目标双曲线区域进行图像分割和边缘处理,根据双曲线对称性提取顶点,利用顶点坐标定位根系位置;
[0078]
s42、利用基于代数距离拟合算法拟合目标双曲线,提取双曲线参数,利用其参数估算根茎的直径。
[0079]
在步骤s41中,对目标双曲线所在区域进行图像分割和边缘处理。图像分割采用k-means算法,其具体步骤为:设定聚类中心数目为k=2,即把图像分为目标双曲线以及背景两类,计算其他样本点与聚类中心的欧式距离,选择欧式距离最小的聚类中心,归类到该中心所在的簇类中。计算当前每个聚类簇的平均值,并将其作为下一次迭代的聚类中心。计算当前聚类中心与下一次迭代的聚类中心的距离,若小于阈值,则完成迭代,否则重新分配样本点到距离最近的新簇类中。其中,阈值可以认为是一个最小距离,当两次聚类中心的距离小于该距离时,就可以认为该聚类中心的位置没有发生偏移,具体计算时,可以进行适应性的修改。边缘处理采用sobel算子或者canny算子。
[0080]
通过双曲线的对称性以及在顶点的两侧,呈现往两端单调下降,且在顶点处,斜率的绝对值达到最小的特征,提取双曲线顶点参数(x0,t0),根据探地雷达成像原理,双曲线顶点位置为根目标的位置,所以通过提取双曲线顶点即可实现对根目标的定位。
[0081]
在步骤s42中,通过双曲线参数估算根目标直径。根据探地雷达的工作方式,利用几何关系可得:
[0082][0083]
其中,v表示电磁波在土壤中的传播速度,x表示水平位置,t表示回波时延,ti表示位于xi的回波时延;(x0,t0)表示顶点位置,xi表示采样点水平位置,r表示根茎半径;将(1)式进行变化得二次曲线方程如下:
[0084][0085]
利用基于代数距离拟合算法对雷达图像中的目标进行拟合,如图9所示,双曲线表达式拟合为带约束条件的隐式二阶多项式:
[0086]
f(p,x)=p
·
x=ax2+bxt+ct2+dx+et+f=0
ꢀꢀꢀ
(3)
[0087]
其中,p=[a,b,c,d,e,f]
t
,x=(x2,xt,t2,x,t,1)。
[0088]
对于选定的n个离散采样点xi=(xi,ti),n=1...n,用s(p,x)表示曲线到各点的代数距离的平方的最小值,其定义如下:
[0089][0090]
通过双曲线顶点以及双曲线开口向下的特征,可以确立约束条件:
[0091]
双曲线顶点位置的双程走时最短,即:t0≤min(ti);
[0092]
顶点位置位于开口范围之内,即:x
l
≤x0≤xr,x
l
表示顶点左侧采样点的水平位置,xr表示顶点右侧采样点的水平位置;
[0093]
通过计算b
2-4ac的值可以确立曲线的形状,在该双曲线模型中:
[0094]
b=0,4ac=-1;
[0095]
通过基于代数距离算法都得到双曲线隐式二阶多项式之后,根据下式可对半径进行估算:
[0096][0097]
(5)式中,r表示根茎半径,e为式(3)中的参数;v表示电磁波在土壤中的传播速度。
[0098]
本实施例中,通过以果树为中心的圆形轨道作为探地雷达的探测路线;对探地雷达生成的b-scan图像进行预处理操作;以实验收集的真实图像数据和通过仿真软件gprmax得到仿真图像作为数据集,并且通过cyclegan网路进行数据增强,将数据集的图片输入到yolov5s深度学习网络模型进行训练,通过yolov5s对b-scan图中的根目标进行快速识别,定位双曲线目标区域;提取目标双曲线的顶点,通过基于代数距离拟合的方法提取根目标的双曲线信息,并且据此推算跟目标的位置以及直径。本发明提供的基于深度学习和探地雷达的果树根系识别与定位方法能够在不破坏根系以及周围土壤环境的条件下对果树根系进行识别和定位,探测范围可控,方法操作比较简便,相比传统方法,可显著提高工作效率,且识别和定位准确率高。
[0099]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1