一种一维激光条形码扫描解码引擎的制作方法
1.本实用新型涉及条形码扫描技术领域,具体是指一种一维激光条形码扫描解码引擎。
背景技术:
2.目前一维激光条形码扫描引擎控制电路复杂,并且解码模糊码、长码、缺损条形码能力存在严重不足,解码景深范围小,抗干扰能力差,生产过程中存在摆动器停振的问题。
3.所以,一种成本低廉且性能强大的条形码扫描解码引擎成为人们亟待解决的问题。
技术实现要素:
4.本实用新型的目的是提供一种成本低廉性能强大的条形码扫描引擎。
5.为实现上述目的,本实用新型提供的技术方案为:一种一维激光条形码扫描解码引擎,包括解码主控电路以及与解码主控电路连接的软件自动增益控制电路、多级小信号放大电路、激光稳定电路、软件摆动器控制电路、红外自动感应电路、工作状态声音提示电路、工作状态led指示电路、供电电路;
6.所述激光稳定电路发送激光至软件摆动器控制电路,所述软件摆动器控制电路将激光转换为一条激光线并在扫描条形码后反射给多级小信号放大电路,所述多级小信号放大电路将光线强弱信号放大后发送给解码主控电路,所述解码主控电路将接收的模拟信号转换为数字信号,并根据信号的质量调整软件自动增益控制电路的增益同时将转换的数字信号解码。
7.作为改进,所述解码主控电路采用mcu最小系统电路。
8.作为改进,所述软件自动增益控制电路与mcu的引脚39电性连接,所述多级小信号放大电路与mcu的引脚11电性连接,所述激光稳定电路与mcu的引脚43电性连接,所述软件摆动器控制电路与mcu的引脚40、引脚42电性连接,所述红外自动感应电路与mcu的引脚14
‑
16电性连接,所述工作状态声音提示电路与mcu的引脚18电性连接,所述工作状态led指示电路与mcu的引脚38电性连接,所述供电电路与mcu的引脚30
‑
36电性连接。
9.作为改进,所述多级小信号放大电路包括多级信号放大器以及光电池d1,所述光电池d1接收扫描过条形码的激光信号,所述多级信号放大器将激光信号进行放大处理。
10.作为改进,所述mcu驱动软件摆动器控制电路中的摆动器均匀摆动并检测摆动器的摆动情况。
11.本实用新型与现有技术相比的优点在于:本实用新型采用软件方式驱动摆动器,mcu可以定时检测摆动器是否摆动,如果检测到摆动器停摆,则mcu强制施加驱动信号,从而使摆动器重新摆动起来,此外采用软件方式能大幅减少外围元器件数量,从而提高性能的同时降低成本;本实用新型采用软件控制自动增益的方式,由于软件可以随意检测波形的质量,能更精确的控制增益,使条码波形更完美的还原,从而具有更强的解码能力;本实用
新型能够解出传统引擎不能顺利解的长短条形码、模糊码,彻底解决摆动器停振问题,同时降低扫描器成本。
附图说明
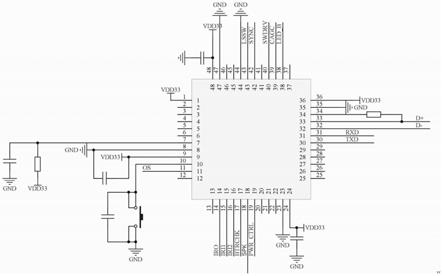
12.图1是本实用新型一种一维激光条形码扫描解码引擎的电路原理图。
13.图2是本实用新型一种一维激光条形码扫描解码引擎的图1中解码主控电路的电路原理图。
14.图3是本实用新型一种一维激光条形码扫描解码引擎的图1中软件自动增益控制电路的电路原理图。
15.图4是本实用新型一种一维激光条形码扫描解码引擎的图1中多级小信号放大电路的电路原理图。
16.图5是本实用新型一种一维激光条形码扫描解码引擎的图1中激光稳定电路的电路原理图。
17.图6是本实用新型一种一维激光条形码扫描解码引擎的图1中软件摆动器控制电路的电路原理图。
18.如图所示:1、解码主控电路,2、软件自动增益控制电路,3、多级小信号放大电路,4、激光稳定电路,5、软件摆动器控制电路,6、红外自动感应电路,7、工作状态声音提示电路,8、工作状态led指示电路,9、供电电路。
具体实施方式
19.下面结合附图对本实用新型一种一维激光条形码扫描解码引擎做进一步的详细说明。
20.结合附图1
‑
6,对本实用新型进行详细介绍。
21.一种一维激光条形码扫描解码引擎,包括解码主控电路1以及与解码主控电路1连接的软件自动增益控制电路2、多级小信号放大电路3、激光稳定电路4、软件摆动器控制电路5、红外自动感应电路6、工作状态声音提示电路7、工作状态led指示电路8、供电电路9;
22.所述激光稳定电路4发送激光至软件摆动器控制电路5,所述软件摆动器控制电路5将激光转换为一条激光线并在扫描条形码后反射给多级小信号放大电路3,所述多级小信号放大电路3将光线强弱信号放大后发送给解码主控电路1,所述解码主控电路1将接收的模拟信号转换为数字信号,并根据信号的质量调整软件自动增益控制电路2的增益同时将转换的数字信号解码。
23.所述解码主控电路1采用mcu最小系统电路。
24.所述软件自动增益控制电路2与mcu的引脚39电性连接,所述多级小信号放大电路3与mcu的引脚11电性连接,所述激光稳定电路4与mcu的引脚43电性连接,所述软件摆动器控制电路5与mcu的引脚40、引脚42电性连接,所述红外自动感应电路6与mcu的引脚14
‑
16电性连接,所述工作状态声音提示电路7与mcu的引脚18电性连接,所述工作状态led指示电路8与mcu的引脚38电性连接,所述供电电路9与mcu的引脚30
‑
36电性连接。
25.所述多级小信号放大电路3包括多级信号放大器以及光电池d1,所述光电池d1接收扫描过条形码的激光信号,所述多级信号放大器将激光信号进行放大处理。
26.所述mcu驱动软件摆动器控制电路5中的摆动器均匀摆动并检测摆动器的摆动情况。
27.本实用新型一种一维激光条形码扫描解码引擎的具体实施过程如下:
28.扫描器工作时,由激光稳定电路4的激光器发出一束激光,经由软件摆动器控制电路5的摆动器将固定激光束转换成一条激光线,使激光点能从左到右,再从右到左扫过条形码,然后经过一个反光镜反射给多级小信号放大电路3的光电池d1,再经过光电池d1的后级放大电路,将光线强弱信号进行放大处理,将数据发送给解码主控电路1的mcu,mcu将数据用adc转换成数字信号,根据信号的质量来调整软件自动增益控制电路2的增益同时将转换的数字信号进行解码。
29.mcu采用软件方式驱动摆动器,并定时检测摆动器是否摆动,如果检测到摆动器停摆,则mcu强制施加驱动信号,从而使摆动器重新摆动起来,采用软件方式能大幅减少外围元器件数量,从而提高性能的同时降低成本。
30.采用软件控制自动增益的方式,软件可以随意检测波形的质量,能更精确的控制增益,使条码波形更完美的还原,从而具有更强的解码能力。
31.本实用新型的各个功能可以依据需要进行增减调整,并可以应用到无线条码扫描设备,但原理不变。
32.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1