一种环境空间定位装置的制作方法
1.本发明涉及mr(mediated reality)领域,尤其涉及一种环境空间定位装置。
背景技术:
2.在现有的mr技术领域中,通过手机或具备摄像以及数据处理功能的设备对现实场景进行图像采集,并利用数据处理部件将现实场景与虚拟场景进行融合,最终借助显示部件进行展示;
3.但传统的mr设备采集显示质量差,互动性差,不能满足大部分使用者的需求。
4.本发明提供一种环境空间定位装置,解决上述问题。
技术实现要素:
5.本发明所要解决的技术问题在于现有的mr设备采集显示质量差,互动性差,不能满足大部分使用者需求;
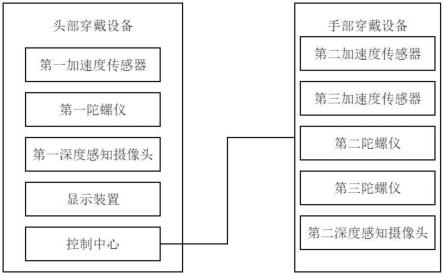
6.提供一种环境空间定位装置,所述环境空间定位装置包括:头部穿戴设备和手部穿戴设备,所述头部穿戴设备包括头部穿戴设备主体、第一加速度传感器、第一陀螺仪、第一深度感知摄像头、显示装置和控制中心,所述第一加速度传感器、所述第一陀螺仪和所述控制中心均固定安装在所述设备主体内部,所述显示装置安装在所述头部穿戴设备主体靠近使用者眼部的表面,所述第一深度感知摄像头固定安装在所述头部穿戴设备主体远离使用者眼部的表面,所述第一加速度传感器、所述第一陀螺仪、所述第一深度感知摄像头和所述显示装置同时与所述控制中心电连接;
7.所述手部穿戴设备为手套式设备主体,所述手套式设备主体的每个指节处均设置有第二加速度传感器和第二陀螺仪,所述手套式设备主体的手掌处同时设置有第三加速度传感器和第三陀螺仪,所述手套式设备主体的每个指尖处均设置有第二深度感知摄像头,所述第二深度感知摄像头、所述第二加速度传感器、所述第二陀螺仪、所述第三加速度传感器和所述第三陀螺仪同时与所述控制中心。
8.实施本发明,具有如下有益效果:
9.本发明能够深度感知摄像头、陀螺仪、加速度传感器等装置的设置,采集高精度的信息,生成高精度的画面,同时通过手部设备的增加能够增强互动性。
附图说明
10.图1是本发明的结构简图;
11.图2是本发明实施例一的流程图;
12.图3是本发明实施例二的流程图;
13.图4是本发明实施例三的流程图;
14.图5是本发明实施例四的流程图。
具体实施方式
15.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
16.实施例一
17.本实施例中,参考说明书附图1和2,本实施例所要解决的技术问题在于现有的mr设备采集显示质量差,互动性差,不能满足大部分使用者需求;
18.提供一种环境空间定位装置,所述环境空间定位装置包括:头部穿戴设备和手部穿戴设备,所述头部穿戴设备包括头部穿戴设备主体、第一加速度传感器、第一陀螺仪、第一深度感知摄像头、显示装置和控制中心,所述第一加速度传感器、所述第一陀螺仪和所述控制中心均固定安装在所述设备主体内部,所述显示装置安装在所述头部穿戴设备主体靠近使用者眼部的表面,所述第一深度感知摄像头固定安装在所述头部穿戴设备主体远离使用者眼部的表面,所述第一加速度传感器、所述第一陀螺仪、所述第一深度感知摄像头和所述显示装置同时与所述控制中心电连接;
19.所述手部穿戴设备为手套式设备主体,所述手套式设备主体的每个指节处均设置有第二加速度传感器和第二陀螺仪,所述手套式设备主体的手掌处同时设置有第三加速度传感器和第三陀螺仪,所述手套式设备主体的每个指尖处均设置有第二深度感知摄像头,所述第二深度感知摄像头、所述第二加速度传感器、所述第二陀螺仪、所述第三加速度传感器和所述第三陀螺仪同时与所述控制中心。
20.本实施例的使用方法,用于如上所述的环境空间定位装置,包括:
21.通过第一深度感知摄像头采集周围环境信息,将环境信息发送至控制中心,通过第一陀螺仪和第一加速度传感器采集空间位置信息,将空间位置信息发送至控制中心;
22.通过控制中心接收环境信息和空间位置信息,通过控制中心进行mesh处理生成虚拟物体显示信息,将虚拟物体显示信息发送至显示装置;
23.通过显示装置显示虚拟物体显示信息。
24.实施本发明,具有如下有益效果:
25.本发明能够深度感知摄像头、陀螺仪、加速度传感器等装置的设置,采集高精度的信息,生成高精度的画面,同时通过手部设备的增加能够增强互动性。
26.实施例二
27.本实施例中参考说明书附图1和说明书附图3,本实施例所要解决的技术问题在于现有的mr设备采集显示质量差,互动性差,不能满足大部分使用者需求;
28.提供一种环境空间定位装置,所述环境空间定位装置包括:头部穿戴设备和手部穿戴设备,所述头部穿戴设备包括头部穿戴设备主体、第一加速度传感器、第一陀螺仪、第一深度感知摄像头、显示装置和控制中心,所述第一加速度传感器、所述第一陀螺仪和所述控制中心均固定安装在所述设备主体内部,所述显示装置安装在所述头部穿戴设备主体靠近使用者眼部的表面,所述第一深度感知摄像头固定安装在所述头部穿戴设备主体远离使用者眼部的表面,所述第一加速度传感器、所述第一陀螺仪、所述第一深度感知摄像头和所述显示装置同时与所述控制中心电连接;
29.所述手部穿戴设备为手套式设备主体,所述手套式设备主体的每个指节处均设置有第二加速度传感器和第二陀螺仪,所述手套式设备主体的手掌处同时设置有第三加速度
传感器和第三陀螺仪,所述手套式设备主体的每个指尖处均设置有第二深度感知摄像头,所述第二深度感知摄像头、所述第二加速度传感器、所述第二陀螺仪、所述第三加速度传感器和所述第三陀螺仪同时与所述控制中心。
30.本实施例的使用方法,用于如上所述的环境空间定位装置,包括:
31.通过第二陀螺仪、第二加速度传感器、第三陀螺仪和第三加速度传感器采集手部信息,将手部信息发送至所述控制中心;
32.通过控制中心接收手部信息,对手部信息进行建模获得手势信息,将手势信息与预设的手势信息进行比对得到手势命令信息,根据手势命令信息导入外部数据信息并实时生成虚拟物体显示信息,将虚拟物体显示信息发送至所述显示装置;
33.通过显示装置显示虚拟物体显示信息。
34.实施本发明,具有如下有益效果:
35.本发明能够深度感知摄像头、陀螺仪、加速度传感器等装置的设置,采集高精度的信息,生成高精度的画面,同时通过手部设备的增加能够增强互动性。
36.实施例三
37.本实施例中参考说明书附图1和说明书附图4,本实施例所要解决的技术问题在于现有的mr设备采集显示质量差,互动性差,不能满足大部分使用者需求;
38.提供一种环境空间定位装置,所述环境空间定位装置包括:头部穿戴设备和手部穿戴设备,所述头部穿戴设备包括头部穿戴设备主体、第一加速度传感器、第一陀螺仪、第一深度感知摄像头、显示装置和控制中心,所述第一加速度传感器、所述第一陀螺仪和所述控制中心均固定安装在所述设备主体内部,所述显示装置安装在所述头部穿戴设备主体靠近使用者眼部的表面,所述第一深度感知摄像头固定安装在所述头部穿戴设备主体远离使用者眼部的表面,所述第一加速度传感器、所述第一陀螺仪、所述第一深度感知摄像头和所述显示装置同时与所述控制中心电连接;
39.所述手部穿戴设备为手套式设备主体,所述手套式设备主体的每个指节处均设置有第二加速度传感器和第二陀螺仪,所述手套式设备主体的手掌处同时设置有第三加速度传感器和第三陀螺仪,所述手套式设备主体的每个指尖处均设置有第二深度感知摄像头,所述第二深度感知摄像头、所述第二加速度传感器、所述第二陀螺仪、所述第三加速度传感器和所述第三陀螺仪同时与所述控制中心。
40.本实施例的使用方法,用于如上所述的环境空间定位装置,包括:
41.通过第一深度感知摄像头采集周围环境信息,将环境信息发送至控制中心,通过第一陀螺仪和第一加速度传感器采集空间位置信息,将空间位置信息发送至控制中心;
42.通过第二陀螺仪、第二加速度传感器、第三陀螺仪和第三加速度传感器采集手部信息,将手部信息发送至所述控制中心;
43.通过控制中心接收手部信息、环境信息和空间位置信息,通过控制中心进行mesh处理生成虚拟物体显示信息,对手部信息进行建模获得手势信息,将手势信息与预设的手势信息进行比对得到手势命令信息,根据手势命令信息生成实时虚拟物体显示信息,将实时虚拟物体显示信息发送至所述显示装置;
44.通过显示装置显示实时虚拟物体显示信息。
45.所述手势命令信息包括调高亮度、调低亮度、调高透明度、调低透明度、调大虚拟
物体显示大小和调小虚拟物体显示大小。
46.实施本发明,具有如下有益效果:
47.本发明能够深度感知摄像头、陀螺仪、加速度传感器等装置的设置,采集高精度的信息,生成高精度的画面,同时通过手部设备的增加能够增强互动性。
48.实施例四
49.本实施例中参考说明书附图1和说明书附图5,本实施例所要解决的技术问题在于现有的mr设备采集显示质量差,互动性差,不能满足大部分使用者需求;
50.提供一种环境空间定位装置,所述环境空间定位装置包括:头部穿戴设备和手部穿戴设备,所述头部穿戴设备包括头部穿戴设备主体、第一加速度传感器、第一陀螺仪、第一深度感知摄像头、显示装置和控制中心,所述第一加速度传感器、所述第一陀螺仪和所述控制中心均固定安装在所述设备主体内部,所述显示装置安装在所述头部穿戴设备主体靠近使用者眼部的表面,所述第一深度感知摄像头固定安装在所述头部穿戴设备主体远离使用者眼部的表面,所述第一加速度传感器、所述第一陀螺仪、所述第一深度感知摄像头和所述显示装置同时与所述控制中心电连接;
51.所述手部穿戴设备为手套式设备主体,所述手套式设备主体的每个指节处均设置有第二加速度传感器和第二陀螺仪,所述手套式设备主体的手掌处同时设置有第三加速度传感器和第三陀螺仪,所述手套式设备主体的每个指尖处均设置有第二深度感知摄像头,所述第二深度感知摄像头、所述第二加速度传感器、所述第二陀螺仪、所述第三加速度传感器和所述第三陀螺仪同时与所述控制中心。
52.本实施例的使用方法,用于如上所述的环境空间定位装置,包括:
53.通过控制中心导入三维模型,通过第一深度感知摄像头采集周围环境信息,将环境信息发送至控制中心,通过第一陀螺仪和第一加速度传感器采集空间位置信息,将空间位置信息发送至控制中心;
54.同时通过第一深度感知摄像头采集手部环境动作信息,将手部环境动作信息发送至控制中心;
55.通过控制中心接收环境信息、空间位置信息和手部环境动作信息,通过控制中心进行mesh处理生成虚拟物体显示信息和虚拟手部显示信息,将虚拟物体显示信息和虚拟手部显示信息发送至显示装置;
56.通过显示装置显示虚拟物体显示信息和虚拟手部显示信息。
57.通过控制中心导入三维模型实际操作过程包括:
58.医生将操作路径标定在ct文件上;
59.将经过标示的ct文件进行三维数据重建成三维模型;
60.通过控制中心导入三维模型,上述导入数据可以为多条,本实施例可通过控制中心进行切换观察或者单个观察。
61.本实施例还可实现模型锁定与解锁功能:通过点击模型锁定和模型解锁按钮进行调节,当模型处于解锁状态时,可以通过手部手势抓取模型进行移动旋转位置放置,当模型处于锁定状态时,则不能使用手势进行旋转位置变换,可通过模型调整功能进行调节;
62.本实施例还可实现菜单锁定功能:通过点击菜单锁定和菜单解锁按钮进行选择,当菜单处于解锁状态时,菜单栏将会根据头部的移动进行实时位置更新,菜单将会移动到
眼前最佳位置处,当菜单处于锁定状态时,菜单栏将会被固定在点击菜单锁定的这个位置处;
63.实施本发明,具有如下有益效果:
64.本发明能够深度感知摄像头、陀螺仪、加速度传感器等装置的设置,采集高精度的信息,生成高精度的画面,同时通过手部设备的增加能够增强互动性。
65.上所揭露的仅为本发明的几个较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1