一种特因环境作业人员步态稳定性检测方法及应用与流程
1.本发明涉及航天工程技术领域,尤其涉及一种特因环境作业人员步态稳定性检测方法及应用。
背景技术:
2.在各类特因环境任务中,特因环境行走是基础性活动,是特因环境作业人员执行特因环境任务的最基本能力之一。在特因环境下,低重力服装服严重影响了特因环境作业人员的运动和操作能力,特因环境作业人员的行走方式、运动表现、平衡状况均与地面行走存在差异。由于服装特性、特因环境等因素的影响,特因环境行走难度较高,此外,特因环境遍布了陨石、沟坎、斜坡等路况,需要频繁的改变运动状态,同样对步态行走的平衡造成了挑战。在此情况下,阿波罗登月时,特因环境作业人员在特因环境行走时出现了大量跌倒的情况,由于特因环境分布了大量菱角尖锐的陨石,如果头盔撞在陨石上,将是非常危险的情况,严重影响特因环境作业人员执行特因环境任务的安全。因此,特因环境行走的运动生物力学特性和平衡状况,是特因环境行走重点关注的方向。
3.在地面环境步态行走平衡研究方面,研究者已经取得了一些成果。例如,滑跌造成的失衡已有的研究比较多,研究者分析了鞋-地摩擦系数、坡面倾角等因素对滑跌概率的影响,但是特因环境比较特殊,与地球的沙地、湿滑路面不同,特因环境表面是尖锐的小颗粒,摩擦系数大,基本不存在滑倒情况;此外,针对老年人也有一些步态平衡能力模型,步速、步频等参数跟老人的年龄会呈现出一定的相关性,但是这类模型的评价指标和步态平衡之间的理论支撑不明确,且老人的跌倒是以年为单位统计的,跌倒频率与特因环境行走差异较大,难以借鉴作为特因环境行走的评价依据。
技术实现要素:
4.针对现有技术存在的问题,本发明提供一种特因环境作业人员步态稳定性检测方法及应用,判断特因环境作业人员行进过程中是否稳定,能够准确判定特因环境作业人员的状态,另可以选择特因环境作业人员行进中步态、步速以及步长方面的策略,以及步态恢复方面的策略。
5.为达到上述目的,本发明提供了一种特因环境作业人员步态稳定性检测方法,包括:
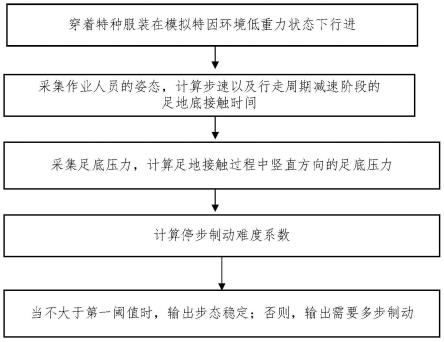
6.特因环境作业人员穿着特种服装在低重力状态下行进;
7.采集特因环境作业人员的步态,计算步速v以及行走周期减速阶段的足地接触时间t;
8.采集足底压力,计算足地接触过程中竖直方向的足底压力;
9.计算停步制动难度系数其中f为鞋底与地的摩擦系数,m为特因环境作业人员穿着特种服装的总重量;
10.当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动。
11.进一步地,当r大于第二阈值时,输出需紧急制动;所述第一阈值为1.03~ 1.1,所述第二阈值为1.54~1.6。
12.进一步地,至少在每只脚的脚后跟和脚尖位置以及髋关节粘贴反光球,实时检测反光球的位置;根据脚后跟反光球在竖直方向的位置,判断脚后跟落地时刻,作为足地接触的起始时刻;足地接触情况下,当髋关节反光球在前进方向上与脚尖位置反光球相同时,作为足地接触的结束时间,计算每个行走周期减速阶段的足地接触时间t;
13.当行进经过测力台时,测力台采集步态行走过程中的三维足底压力,获取足地接触过程中竖直方向的足底压力,计算经过测力台的行走周期竖直方向的足底压力的均值
14.进一步地,服的重量,模拟低重力状态。
15.第二方面提供一种特因环境作业人员步态确定方法,包括:
16.特因环境作业人员穿着特种服装在模拟低重力状态下,以各种步态、步速以及步长行进一段时长;
17.针对每种步态、步速以及步长,采集特因环境作业人员的步态,计算步速v 以及行走周期减速阶段的足地接触时间t;采集足底压力,实时计算足地接触过程中竖直方向的足底压力;在每个行走周期计算停步制动难度系数f为鞋底与地的摩擦系数,m为特因环境作业人员穿着特种服装的总重量;当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动;
18.针对每种步态、步速以及步长,计算多个行走周期的制动难度系数均值,选择制动难度系数均值最小的步态、步速以及步长,作为该特因环境作业人员穿着该特种服装的最稳定行走策略。
19.进一步地,构建特因环境场景,特因环境作业人员以最稳定行走策略在所述特因环境场景行走;当特因环境作业人员以r大于第一阈值时的步态恢复至r不大于第一阈值时的步态时,记录步态变化的过程;
20.针对每种r大于第一阈值的步态,选择步态恢复速度最快的步态变化过程,提取步态恢复动作,作为最优恢复方式。
21.进一步地,按照所述最稳定行走策略以及最优恢复方式对特因环境作业人员进行训练。
22.进一步地,在特因环境作业人员行走时,r大于第一阈值,输出对应的最优恢复方式以提示特因环境作业人员。
23.进一步地,所述各种步态包括:双脚交替前进以及跳跃步态;所述跳跃步态包括双脚前后分叉跳跃步态和双脚并列跳跃步态;
24.所述步速范围为:0.61m/s到1.22m/s;
25.所述步长范围为:0.50m到0.82m;
26.特因环境作业人员单次测试行走距离至少为6m,每个动作重复至少5次。
27.进一步地,当r大于第二阈值时,输出需紧急制动;所述第一阈值为1.03~ 1.1,所述第二阈值为1.54~1.6。
28.第三方面提供一种特种服装验证检测方法,包括;
29.针对每一方案的特种服装,特因环境作业人员或志愿者穿着特种服装在模拟低重力状态下,以特定步态、步速及步长行进特定距离;采集特因环境作业人员的步态,实时计算步速v以及每个行走周期减速阶段的足地接触时间t;采集足底压力,计算足地接触过程中竖直方向的足底压力;每个行走周期计算停步制动难度系数其中f为鞋底与地的摩擦系数,m为特因环境作业人员穿着特种服装的总重量;当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动;
30.计算第i个方案的特种服装的停步制动难度系数均值;
31.选择停步制动难度系数均值最小时对应方案的特种服装作为确定的特种服装方案。
32.本发明的上述技术方案具有如下有益的技术效果:
33.(1)本发明的特因环境作业人员步态稳定性检测方法,构建停步制动难度系数模型,量化各因素对特因环境行走平衡的影响,准确判定特因环境作业人员的特因环境行走过程中的失衡风险。
34.(2)本发明在训练过程中,能够选择特因环境作业人员行进中最优步态、步速以及步长,提高特因环境作业人员行进的稳定性。
35.(3)本发明针对各种步态恢复进行评估,给出最优恢复方式,采用最优恢复方式对特因环境作业人员行进训练,提高了特因环境作业人员恢复稳定的能力;在特因环境作业人员需要多步制动的情况下,输出最优恢复方式提示,保证了特因环境作业人员尽快恢复步态。
36.(4)本发明的特因环境作业人员步态稳定性检测方法可以应用于特种服装的检测,对多种特种服装的方案,进行模拟验证,选择停步制动最容易的方案对应的特种服装,为特种服装设计和工效学要求制定等提供理论支撑。
附图说明
37.图1是特因环境作业人员步态稳定性检测流程图;
38.图2(a)为反光球粘贴位置正向示意图;图2(b)为反光球粘贴位置侧向示意图;
39.图3为地面试验系统组成示意图;
40.图4为特因环境作业人员步态确定方法流程图;
41.图5为特种服装验证检测方法流程图。
具体实施方式
42.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
43.提供一种特因环境作业人员步态稳定性检测方法,结合图1,包括如下步骤:
44.(1)特因环境作业人员穿着特种服装在低重力状态下行进。
45.该检测方法可以用于地面模拟特因环境低重力状态时的行进状态监测,也可以用于特因环境作业人员在特因环境行走时,低重力状态下步态稳定性的检测。
46.如图3所示,在模拟低重力的场景下,试验系统包括减重悬吊设备、kistler 测力台以及ndi运动测量设备。
47.设置减重悬吊设备以及步道,采用减重悬吊设备悬吊特因环境作业人员,提供下肢助力,模拟在特因环境低重力状态。减重设备能够使用弹性吊索定量抵消全部或部分人体重量,并能提供在水平前进方向上的低摩擦阻力环境。受试者穿着威亚服,威亚服与吊索链接位置约在胸部两侧。
48.kistler测力台用于检测三维足底压力。包括测力台
49.ndi运动测量设备对动作进行捕捉。包括ndi optotark、ndi optotark数据单元,ndiodau。ndi optotark为动作捕捉镜头;ndi optotark数据单元为动作数据采集单元,将多个镜头采集的动补数据传输至主控机;ndiodau为数据同步单元,能够将动作捕捉数据与足底压力数据进行时间同步。
50.(2)采集特因环境作业人员的步态,计算步速v以及每个行走周期减速阶段的足地接触时间t;采集足底压力,计算足地接触过程中竖直方向的足底压力
51.ndi运动测量设备,采集步态行走过程中典型身体部位的运动步态数据,需要在人体躯干和下肢粘贴反光球,反光球粘贴的位置如图2所示。至少在每只脚的脚后跟和脚尖位置以及髋关节粘贴反光球,实时检测反光球的位置;根据脚后跟反光球在竖直方向的位置,判断脚后跟落地时刻,作为足地接触的起始时刻;足地接触情况下,当髋关节反光球在前进方向上与脚尖位置反光球相同时,作为足地接触的结束时间,计算每个行走周期减速阶段的足地接触时间t。
52.使用2块kistler测力台,采集步态行走过程中的三维足底压力。两块测力台并排放置,特因环境作业人员两只脚分别踏上两个测力台时,两个测力台分别输出3个维度上的足底压力,可以直接获取竖直方向的足底压力。当行进经过测力台时,获取足地接触过程中竖直方向的足底压力,计算经过测力台的行走周期中足地接触过程中竖直方向的平均足底压力。
53.在特因环境实际行走时,根据特种服装内部安装的力传感器以及姿态传感器,采集竖直方向的足底压力以及步态。根据步态计算步速v以及每个行走周期减速阶段的足地接触时间t。
54.(3)计算停步制动难度系数其中f为特因环境的鞋与地摩擦系数,m为特因环境作业人员穿着特种服装的总质量的1/6。
55.人体停步制动过程是质心速度降低直至为0的过程,若要保证在前进方向上能顺利停下来,则质心在超出脚尖位置之前速度就必须降为0;如果质心位置超出足部,那么会开始新一轮质心失衡再制动的过程。在停步过程中,既需要满足人体动能、势能及人体做功之间的能量守恒定律,也需要满足外力与人体冲量之间的动量守恒定律。
56.在停步过程中,如果质心达到踝关节的正上方时仍存在前进动能,此时人体就会出现倾倒的趋势,包含向前和向下的速度矢量,此时制约人体停步的是动量守恒过程。人体
将做出应激反应,锁定下肢关节,使下肢变为前后分叉状态的准刚体结构,前足用力蹬地,既获得向后的摩擦阻力用于人体水平方向上的减速,又获得向上的地面支撑力用于对抗重力及人体倾倒的趋势,用于垂直方向的减速。在该过程中,必须要满足公式f=ma或i=∫f
x
dt=mv,其中,f
x
是地面对人体向后的摩擦阻力,m是人体质量,a为质心加速度,i为前足着地时刻人体前向的冲量,v为前足着地时刻质心前进速度。该制动过程主要与行走速度、人服质量、质心位置、足底支撑力等因素有关。
57.一般在跑步、快速行走的停步过程中人体存在倾倒趋势,制约人体停步的是动量守恒过程,下面对停步过程中的制动难度系数进行分析。
58.a.冲量需求i
59.若使质心前进速度由v降为0,制动过程中地面需要足部提供的冲量为i=mv。可知,人/人服质量越大,质心速度越快,制动难度越大;支撑足着地时刻到失衡临界时刻的制动时间越长,则制动难度降低。
60.b.最大冲量i
max
61.支撑足触地过程可分为两个阶段。a.从支撑足触地到质心位于支撑足上方,该阶段支撑足能够对质心施加向后的阻力,为质心在前后方向的减速过程;b. 从质心位于支撑足上方到支撑足离地,该阶段支撑足能够对质心施加前向的推动力(人体也可以选择不施加前向的推动力),为质心在前后方向的加速过程。主要对减速过程进行分析。
62.在减速过程中,为了获得最大的地面阻力用于降低质心速度,应满足 f
x
=f*fy,f
x
和fy分别为足底压力在前进方向和竖直方向的分量,f为特因环境的鞋-地摩擦系数。单个减速过程中,i
max
为地面阻力在减速过程中能对人体施展的最大冲量,为足地接触过程中竖直方向的平均足底压力,t为减速阶段的足地接触时间。
63.本发明停步制动难度系数模型,系数越大,停步制动难度越高,当r小于1时,人体能在该减速过程中将速度降为0,当r大于1 时,需要多步制动才能将速度降为0。其中f为特因环境的鞋与地摩擦系数,一般情况下,摩擦系数在0.3~0.8之间。
64.经过试验表明,在所有动作中,停步制动难度系数分布在1.03到3.86之间。特因环境正常行走的停步难度高于地面正常行走。在地面正常行走时,平均停步制动难度系数为1.03,地面正常行走时能够通过向前迈一步即可停下,这符合人的行走经验;在特因环境正常行走时,平均制动难度系数为1.54,需要两步才能停下,如果速度较快或者行走过程中身体前倾的话,需要更多步才能停下。特因环境作业人员特因环境行走时,需要预留距离,做好多步停下的准备。
65.因此本发明选择,当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动。当r大于第二阈值时,输出需紧急制动;所述第一阈值为1.03~1.1,所述第二阈值为1.54~1.6。
66.第二方面提供一种特因环境作业人员步态确定方法,结合图4,包括如下步骤:
67.(1)特因环境作业人员穿着特种服装在模拟特因环境低重力状态下,以各种步态、步速以及步长行进一段时长。
68.步态方式:分为3种工况。在正常步态方式中,志愿者从初始位置出发,依照正常的
行走方式,双脚交替前进;在跳跃步态中,又分为双脚前后分叉跳跃步态和双脚前后并列跳跃步态,特因环境作业人员以双脚向前跳跃的方式行走,行走过程中双脚无交替。
69.特因环境作业人员参加正式测试前,需提前进行培训和体验;特因环境作业人员出发时和停步时体位为立姿双脚并列,行走过程中匀速直线行走。单次测试行走距离为6m,每个动作重复5次,每次完成后休息1min。每名特因环境作业人员一天只进行1次实验,每次实验时长不超过2小时。
70.(2)针对每种步态、步速以及步长,采集特因环境作业人员的步态,计算步速v以及每个行走周期减速阶段的足地接触时间t;采集足底压力,实时计算足地接触过程中竖直方向的足底压力;每个行走周期计算停步制动难度系数其中f为特因环境的鞋与地摩擦系数,m为特因环境作业人员穿着特种服装的总质量;当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动;
71.(3)针对每种步态、步速以及步长,计算多个行走周期的制动难度系数均值,选择制动难度系数均值最小的步态、步速以及步长,作为该特因环境作业人员穿着该特种服装的最稳定行走策略。
72.(4)构建特因环境表面场景,特因环境作业人员以最稳定行走策略在所述特因环境表面场景行走;当特因环境作业人员以r大于第一阈值时的步态恢复至 r不大于第一阈值时的步态时,记录步态变化的过程。
73.(5)针对每种r大于第一阈值的步态,选择步态恢复速度最快的步态变化过程,提取步态恢复动作,作为最优恢复方式。
74.所有动作的足底平均力在167n到626n之间,所有动作的冲量分布在151ns 到538ns之间。在不同的运动工况下,步速分布在0.61m/s到1.22m/s之间。在不同的运动工况下,步态周期分布在1.05s到1.67s之间。在不同的运动工况下,步长分布在0.50m到0.82m之间。
75.进一步地,按照所述最稳定行走策略以及最优恢复方式对特因环境作业人员进行训练。使得特因环境作业人员能够以最稳定行走策略行走,并在处于r大于第一阈值的步态时,根据训练情况迅速恢复。
76.另一方面,在特因环境作业人员实际行进时,如果检测r处于大于第一阈值的状态时,及时查找到最优的恢复方式,输出恢复提醒。提醒内容例如包括:
77.a.减速。
78.b.迈出大步,身体重心后倾。
79.c.增大双脚之间的距离。
80.d.采用脚尖点地的方式进行制动。
81.特因环境作业人员能够迅速采用提醒的策略恢复稳定步态。
82.再一方面,提供一种特种服装验证检测方法,结合图5,包括如下步骤:
83.(1)针对每一方案的特种服装:
84.特因环境作业人员或志愿者穿着特种服装在模拟特因环境低重力状态下,以特定步态、步速及步长行进特定距离;采集特因环境作业人员的步态,实时计算步速v以及每个行走周期减速阶段的足地接触时间t;采集足底压力,实时计算足地接触过程中竖直方向的
足底压力;每个行走周期计算停步制动难度系数其中f为特因环境的鞋与地摩擦系数,m为特因环境作业人员穿着特种服装的总质量;当r不大于第一阈值时,输出步态稳定;当r大于第一阈值时,输出需要多步制动。
85.(2)计算第i个方案的特种服装的停步制动难度系数均值。
86.(3)选择停步制动难度系数均值最小时对应方案的特种服装作为确定的特种服装方案。
87.对于特种服装的多种设计方案,目前尚未考虑到特因环境作业人员穿着后的制动影响。而特种服装的质量、重心位置的影响、服装约束等方面,均对于制动产生影响。
88.对于多个方案分别进行停步制动难度系数均值的计算,并根据该值进行方案选择。
89.本发明提供了一种基于验证机制的特种服装方案确定方法。为特种服装设计和工效学要求制定等提供理论支撑。
90.综上所述,本发明涉及一种特因环境作业人员步态稳定性检测方法及应用,构建停步制动难度系数模型,量化各因素对特因环境行走平衡的影响,准确判定特因环境作业人员的特因环境行走过程中的失衡风险。本发明在训练过程中,能够选择特因环境作业人员行进中最优步态、步速以及步长,提高特因环境作业人员行进的稳定性。本发明针对各种步态恢复进行评估,给出最优恢复方式,采用最优恢复方式对特因环境作业人员行进训练,提高了特因环境作业人员恢复稳定的能力;在特因环境作业人员需要多步制动的情况下,输出最优恢复方式提示,保证了特因环境作业人员尽快恢复步态。
91.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1