大尺寸工件分拣的视觉定位寻板装置及方法与流程
1.本发明涉及工件分拣技术领域,尤其涉及一种大尺寸工件分拣的视觉定位寻板装置及方法。
背景技术:
2.近年来,国家发布多项政策支持制造业智能化转型,钢板分拣生产线智能化、无人化的发展逐渐进入了正轨。但与此同时,对于钢板分拣中的大工件,存在相机拍不全、工件形状多样化、一种端拾器覆盖不全等痛点。为解决这些问题,通常采用的方法是拍摄多张照片拼接合成,再识别定位以及依据不同的零件更换端拾器抓取。然而多次拍照拼接导致计算量大、耗时长、处理复杂等问题,更换端拾器也存在效率低且逻辑繁复等问题,因此急需一种更高效且省时的大工件视觉识别定位技术。
技术实现要素:
3.本发明要解决的技术问题是克服现有技术的不足,提供一种结构简单、自动化程度高且布置合理的大尺寸工件分拣的视觉定位寻板装置以及一种步骤简单、计算量小、执行方便且省时高效的大尺寸工件分拣的视觉定位寻板方法。
4.为解决上述技术问题,本发明提出的技术方案为:
5.一种大尺寸工件分拣的视觉定位寻板装置,包括摄像设备、端拾器和控制系统,所述摄像设备和端拾器均与控制系统通信连接;所述摄像设备用于获取至少一张含有钢板角点和至少一张含有钢板部分边缘的图像,并发送至控制系统;所述控制系统将图像与预设的钢板套料图比对得到钢板位置信息以及钢板各工件对应的位置信息,还依据各工件的位置信息驱动所述端拾器拾取工件。
6.作为上述大尺寸工件分拣的视觉定位寻板装置的进一步改进:
7.所述控制系统包括:
8.视觉模块:用于对摄像设备获取的图像进行边缘检测获取图像边缘特征点,还用于对套料图对应图像中钢板部分位置的局部图进行边缘检测获取局部图边缘特征点作为模板;并通过匹配图像特征和作为模板的局部图特征,获取钢板在图像中的坐标,再将获取的钢板图像坐标与预设的摄像设备标定的外参矩阵结合处理转换为钢板实际坐标,并结合套料图中工件位置获取钢板中各工件的实际坐标;
9.执行模块:用于依据各工件的实际坐标发送信号控制端拾器拾取工件。
10.坐标转换模块:用于将获取的钢板图像坐标与预设的摄像设备标定的外参矩阵结合处理转换为钢板实际坐标,并结合套料图中工件位置获取钢板中各工件的实际坐标;
11.执行模块:用于依据各工件的实际坐标发送信号控制端拾器拾取工件。
12.所述摄像设备包括相机和多个光源,多个所述光源绕相机均匀布设。
13.所述摄像设备还包括支架,所述支架的端部设有连接盘,所述连接盘的中心连接相机,边缘均匀连接各所述光源。
14.所述端拾器能绕竖直轴线回转,所述支架的另一端部连接端拾器,使相机能随端拾器同步绕竖直轴线回转。
15.所述端拾器的拾取面上均布有可单独开关的多个吸盘,所述控制系统内对应各工件预设有各拾取方案,所述拾取方案包括各吸盘的启闭信息,所述控制系统依据各拾取方案驱使端拾器拾取各工件。
16.大尺寸工件分拣的视觉定位寻板装置还包括桁架,所述桁架包括水平布置的x架和y架以及竖直布置的z架,x架和y架的布置方向相垂直,且y架沿x架布置方向滑设连接在x架上,所述z架的顶端沿y架布置方向滑设连接在y架上,底端连接端拾器和摄像设备,且端拾器和摄像设备能绕竖直轴线相对z架回转,z架能沿自身所在竖直轴线伸缩。
17.一种大尺寸工件分拣的视觉定位寻板方法,采用上述装置实现,并包括以下步骤:
18.s1:使用摄像设备获取待分拣钢板的图像,所述图像包括至少一张含有钢板角点和至少一张含有钢板部分边缘的图像;
19.s2:对所述图像进行边缘检测,获取图像边缘的特征点;
20.s3:截取钢板的套料图上对应图像中钢板部分位置的局部图,对局部图提取边缘,获取局部图边缘的特征点,作为模板;
21.s4:将模板中的特征信息和图像中的特征信息进行配对,获取钢板在图像中的坐标位置;
22.s5:依据钢板的图像坐标位置,以及摄像设备标定的外参矩阵得到钢板在桁架坐标系中的位置,并结合各工件在套料图中的相对位置以及钢板的桁架坐标位置得到各工件的桁架坐标系位置;
23.s6:采用端拾器依据各工件的桁架坐标系位置拾取钢板中各待分拣工件。
24.与现有技术相比,本发明的优点在于:
25.本发明的大尺寸工件分拣的视觉定位寻板装置,包括摄像设备、端拾器和控制系统,摄像设备和端拾器均与控制系统通信连接。摄像设备用于获取至少一张含有钢板角点和至少一张含有钢板部分边缘的图像,并发送至控制系统;控制系统用于依据接收的图像与预设的钢板套料图比对得到钢板的位置信息以及各工件对应的位置信息,还依据各工件的位置信息驱动所述端拾器拾取工件。这种设置方式只通过简单的结构便能够实现工件的自动化拾取,且由于结合了钢板的套料图,因此能够使控制系统以最少的图像信息得到钢板与工件的对应位置,从而自动化精准拾取工件。且即便面对大工件的拾取过程也无需对图像进行拼接,因此计算量少、减少了拍摄次数、加快了生产节拍,有效提升生产效率,具有更广泛的实用价值。
附图说明
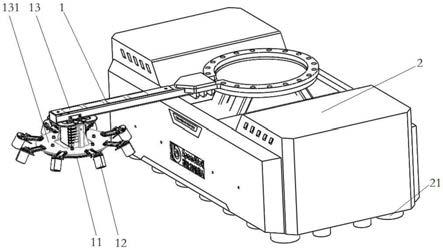
26.图1是大尺寸工件分拣的视觉定位寻板装置中端拾器和摄像设备的示意图;
27.图2是大尺寸工件分拣的视觉定位寻板装置中端拾器的底面示意图;
28.图3是大尺寸工件分拣的视觉定位寻板方法的示意图;
29.图4是大尺寸工件分拣的视觉定位寻板装置的结构示意图。
30.图例说明:1、摄像设备;11、相机;12、光源;13、支架;131、连接盘;2、端拾器;21、吸盘;3、桁架;31、x架;32、y架;33、z架。
具体实施方式
31.为了便于理解本发明,下文将结合说明书附图和较佳的实施例对本发明做更全面、细致地描述,但本发明的保护范围并不限于以下具体实施例。
32.实施例:
33.如图1所示,本实施例的大尺寸工件分拣的视觉定位寻板装置,包括摄像设备1、端拾器2和控制系统,摄像设备1和端拾器2均与控制系统通信连接;摄像设备1用于获取至少一张含有钢板角点和至少一张含有钢板部分边缘的图像,并发送至控制系统;控制系统用于依据接收的图像与预设的钢板套料图比对得到钢板的位置信息以及各工件对应的位置信息,还依据各工件的位置信息驱动端拾器2拾取工件。本实施例这种设置方式只通过简单的结构便能够实现工件的自动化拾取,且由于结合了钢板的套料图,因此能够使控制系统以最少的图像信息得到钢板与工件的对应位置,从而自动化精准拾取工件。且即便面对大工件的拾取过程也无需对图像进行拼接,因此计算量少、减少了拍摄次数、加快了生产节拍,有效提升生产效率,具有更广泛的实用价值。
34.为了实现上述功能,控制系统包括:
35.视觉模块:用于对摄像设备1获取的图像进行边缘检测获取图像边缘特征点,还用于对套料图对应图像中钢板部分位置的局部图进行边缘检测获取局部图边缘特征点作为模板;并通过匹配图像特征和作为模板的局部图特征,获取钢板在图像中的坐标,再将获取的钢板图像坐标与预设的摄像设备1标定的外参矩阵结合处理转换为钢板实际坐标,并结合套料图中工件位置获取钢板中各工件的实际坐标;
36.执行模块:用于依据各工件的实际坐标发送信号控制端拾器2拾取工件。
37.以上各功能模块可以通过常规视觉设备以及控制信号收发设备等实现,在此不做赘述。承载控制系统的硬件设备可以直接设置在装置附近,通过有线或无线连接,也可以设置在远端通过无线通信传输信号。
38.本实施例中,摄像设备1包括相机11和多个光源12,多个光源12绕相机11均匀布设,均匀布设的光源12可以为摄像区域提供全方位覆盖的光照朝向,构建良好稳定可靠的环境光,确保摄像区域的照度,使相机11获取的图像更加清晰,图像中钢板边缘的识别提取更加容易。相机11为大视角的2d相机,尽可能获取大范围图像。
39.本实施例中,摄像设备1还包括支架13,支架13的端部设有连接盘131,连接盘131的中心连接相机11,边缘均匀连接各光源12。支架13的另一端部连接端拾器2,使相机11能随端拾器2同步绕竖直轴线回转,可实现多方位图像的获取。本实施例中,支架13的另一端设有环状结构,端拾器2的顶部设有适配的轴状结构。二者可以通过常规方案实现回转,在此不做赘述。
40.本实施例中,如图2所示,端拾器2的拾取面上均布有可单独开关的多个吸盘21,控制系统内对应各工件预设有各拾取方案,拾取方案包括各吸盘21的启闭信息,控制系统依据各拾取方案驱使端拾器2拾取各工件。本实施例中,吸盘21为电永磁铁,通过电源的通断实现启闭。点阵式均布的吸盘21形成吸附区域可控的吸附面,根据工件的形状调节覆盖工件区域的各吸盘21开启,其余位置关闭,便可以形成对应工件的拾取方案。
41.本实施例中,装置还包括桁架3,如图4所示,桁架3包括水平布置的x架31和y架32以及竖直布置的z架33,x架31和y架32的布置方向相垂直,且y架32沿x架31布置方向滑设连
接在x架31上,z架33的顶端沿y架32布置方向滑设连接在y架32上,底端连接端拾器2和摄像设备1。由于x架31和y架32能够相对滑动,因此连接在y架32上的z架33的位置可以在水平面上任意移动,摄像设备1的摄像范围以及端拾器2的拾取范围能够实现平面各方向上的全面覆盖。端拾器2和摄像设备1能绕竖直轴线相对z架33回转,从而实现拍摄角度和拾取角度的变化,本实施例中,端拾器2的顶面上可通过竖直的圆轴连接z架33底端,摄像设备1的支架13端部可以设置套接在圆轴上的环形法兰实现回转连接。z架33能沿自身所在竖直轴线伸缩,从而实现端拾器2向下拾取工件以及向上吊装移动工件。
42.本实施例的大尺寸工件分拣的视觉定位寻板方法,采用上述装置实现,如图3所示,并包括以下步骤:
43.s1:使用摄像设备1获取待分拣钢板的图像,图像包括至少一张含有钢板角点和至少一张含有钢板部分边缘的图像;
44.s2:对图像进行边缘检测,获取图像边缘的特征点;
45.s3:截取钢板的套料图上对应图像中钢板角以及边位置的局部图,分别对角局部图和边局部图提取边缘,获取局部图边缘的特征点,作为角和边的模板;
46.s4:将模板中的特征信息和图像中的特征信息进行配对,在角图像中匹配到钢板的角的图像坐标位置。使用同样的方式得到边照片中钢板边的图像坐标位置;
47.s5:依据钢板角和边的图像坐标位置,以及摄像设备1标定的外参矩阵得到角和边的桁架3坐标系位置,进而得到钢板在桁架3坐标系中的位置,并结合各工件在套料图中的相对位置以及钢板的桁架3坐标位置得到各工件的桁架3坐标系位置;其中摄像设备1标定的外参矩阵可以人工设置输入,为常规的标定方式,在此不作赘述;
48.s6:采用端拾器2依据各工件的桁架3坐标系位置拾取钢板中各待分拣工件。
49.本实施例中的控制系统为市面上常规的能够用于实现图像识别、边缘检测、图像比对以及通过计算获取坐标等功能的系统,在此不做赘述。
50.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。对于本领域的技术人员来说,在不脱离本发明的技术构思前提下所得到的改进和变换也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1