一种海量轨迹数据的热力流向图生成方法与流程
1.本发明涉及智能交通和数据处理技术领域,具体地说,是一种海量轨迹数据的热力流向图生成方法。
背景技术:
2.随着车联网和大数据技术的发展,车辆轨迹热力图成为一种有力的车辆数据分析和可视化工具,而热力流向图除了表现轨迹密度外还能直观地展示出车辆流向,对车辆轨迹数据分析有更大的作用。
3.目前市场上对于大量轨迹数据的热力图渲染,一般包括轨迹点图、轨迹线图、轨迹热力图等渲染方式。轨迹点图是将所有的轨迹点地理坐标转化为屏幕坐标并一一在图片中渲染实现的,所展示的每个点均为真实的车辆位置,并可以利用多个点按一定的颜色和透明度的叠加来通过亮度或颜色展示出不同位置的轨迹密度。轨迹线图是将所有车辆实际轨迹点连接的路线在图片中渲染实现的,也可以通过叠加效果来展示不同路线的流量密度,并且进一步通过对路线渲染的动画效果处理,展示出车辆流动方向。轨迹热力图是利用轨迹点数据,按照一定的热力图生成算法,将不同位置的轨迹点密度转换为图片不同位置的热力颜色显示出来,热力图方法不是直接展示轨迹数据,但通过热力图生成算法得到的统计结果能更直观地展示出车辆的宏观密度分布,尤其在大尺度的地理空间范围展示中具有更好的效果。
4.在处理海量数据方面,目前一般采用基于opengl等计算机图形渲染技术实现高性能轨迹渲染,可以处理高达千万级轨迹点的实时渲染。另一方面,对于数量更大的轨迹数据集一般采用空间聚合技术对数据进行预处理,将位置相近的轨迹点进行合并,以减少实际渲染数据量。此外,还有利用地理空间瓦片数据分割技术进行将数据分割为瓦片并进行空间聚合的处理方法。现有轨迹热力图生成方法中,通过对轨迹点或轨迹线进行直接渲染的方法,其数据点数一般最多可达到千万的量级,在数据量更大时会出现严重的性能问题,而无法实现流畅的浏览,甚至根本不能完成渲染。使用空间聚合技术可以大大减少实际渲染数据量,能够实现更大数据量的热力图展示,但这是以牺牲细节数据为代价的,当需要放大查看热力图数据细节时,对于局部地区的不同轨迹密度的展示分辨率会大大降低。利用地理瓦片数据方法,可以通过对不同层级的瓦片数据按照不同的尺度进行空间聚合,可以兼顾不同放大级别条件下展示的性能和分辨效果,但是目前市场中的技术还是只针对点轨迹数据进行聚合,由于不同轨迹路线起点终点差别较大而难于实现对轨迹路线的空间聚合,因而仍然无法实现海量轨迹数据的热力流向图展示。
技术实现要素:
5.本发明的目的是提出一种热力流向图生成方法,能够针对海量车辆轨迹数据实现热力流向图的动态展示,并支持不同尺度下的自适应高性能渲染和流畅浏览。本发明采用了轨迹线的空间聚合方法,打破上述瓦片数据方法中只能处理点数据的限制,并通过动画
渲染方法实现轨迹热力流向图的动态展示。
6.本发明采用的具体技术方案如下:一种海量轨迹数据的热力流向图生成方法,具体包括两部分有向轨迹曲线空间聚合和轨迹热力流向图动态渲染。
7.其中,有向轨迹曲线空间聚合包括以下步骤:首先,车辆轨迹数据经数据清洗得到有效输入数据,该有效输入数据为各个车辆的轨迹路线,每一个车辆的轨迹路线为按时间顺序排列的轨迹点连接得到的多段折线。
8.其次,对于各个车辆的轨迹线,通过线性插值得到密化的有向轨迹点,其中插值步长根据生成热力图的空间分辨率确定,例如可以选取当前层级比例尺下单个像素代表的地理空间距离。
9.最后,对于密化的有向轨迹点进行空间聚合,其中聚合空间范围根据生成热力图的空间分辨率确定,例如可以选取当前层级比例尺下单个像素代表的地理空间距离为直径的圆作为一个基本聚合空间单位。将每一个聚合范围内的所有点,聚合为一个点,该点的位置为范围内各点的算术平均值,该聚合的点的属性包括权重与方向角,其权重值为聚合范围内点的总数,其方向角为聚合范围内的各点方向角值的众数。
10.经过上述聚合计算,得到聚合后的有向热力点数据集,再进行轨迹热力流向图动态渲染,其渲染方法是根据有向热力点的权重和方向逐一进行渲染后,合成得到一幅完整的热力流向图,其中单个热力点的渲染步骤为:首先,根据该点位置坐标换算为屏幕坐标,确定该点绘制中心位置。
11.其次,根据该点权重值,确定该点绘制尺寸大小和颜色,权重越大的点绘制尺寸越大,颜色的亮度越高,透明度越低,具体尺寸和颜色可根据实际渲染效果选取;然后,按一定帧率逐帧绘制该热力点的流向动画。
12.经过上述动态渲染方法,可以利用空间聚合得到的离散有向点,生成表示连续动态轨迹的热力流向图,其动画效果表示车辆流向,轨迹亮度和宽度表示车流量大小。
13.本发明的进一步改进,一种海量轨迹数据的热力流向图生成方法,具体实施步骤如下:步骤101:对输入车辆轨迹数据进行清洗,滤除其中的无效和错误数据点;步骤102:根据输入数据的空间范围和分析需求,确定瓦片数据的层级和空间范围,建立瓦片数据集;步骤103:对于每一层级,根据输入轨迹点的位置计算所属瓦片,将数据划分到各瓦片中;步骤104:对于划分到每一瓦片中的轨迹数据,利用上述的有向轨迹曲线空间聚合方法,得到各瓦片的有向热力点数据;步骤105:在生成热力流向图时,根据当前地图空间浏览范围,计算所需的层级和瓦片范围,并按需进行数据请求;步骤106:对于上一步骤请求得到的瓦片中的有向热力点数据,利用上述的轨迹热力流向图的动态渲染方法,实时渲染生成有向轨迹热力图。
14.本发明的有益效果:本发明利用空间聚合技术将海量有向轨迹线聚合为有向热力点数据,并通过有向热力点数据集动态渲染方法,生成车辆轨迹的热力流向图,可以在展示
不同位置车流密度的同时,利用动画效果展示出车流方向。本发明方法可以弥补现有的轨迹热力图技术在流动方向展示上的不足,也解决了直接进行海量轨迹线渲染的性能问题,将成为海量车辆轨迹数据分析与可视化有一种有力工具。
附图说明
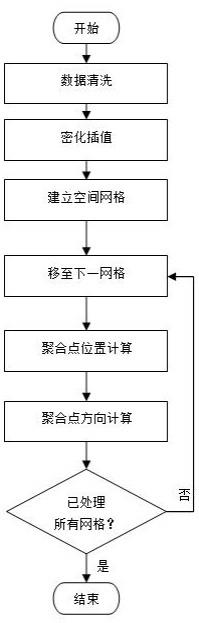
15.图1是本发明有向曲线空间聚合流程示意图。
16.图2是本发明中有向曲线空间聚合方法示意图。
17.图3是本发明中单个有向热力点渲染方法示意图。
具体实施方式
18.为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
19.实施例:一种海量轨迹数据的热力流向图生成方法,具体技术方案说明如下:1)有向轨迹曲线空间聚合方法有向曲线的空间聚合是实现海量数据热力流向图的基础,其流程如图1所示。
20.首先,对车辆轨迹数据进行数据清洗,去除无效定位数据以及停车时的定位数据。清洗后得到有效输入数据为各个车辆的轨迹路线,每一个车辆的轨迹路线为按时间顺序排列的轨迹点连接得到的多段折线,例子如图2 (a)所示。
21.其次,对于各个车辆的轨迹线,通过线性插值得到密化的有向轨迹点,如图2(b)所示,其中插值步长根据生成热力图的空间分辨率确定,例如可以选取当前层级比例尺下单个像素代表的地理空间距离。设一条n个点组成的轨迹线,按时间顺序坐标分别为(x1,y1),(x2,y2),
…
,(xn,yn),取插值距离为d,则对于上述轨迹中的第i段的距离为点(xi,yi)到点(x
i+1
,y
i+1
),其补充插值点列坐标为:其中di为点(xi,yi)到点(x
i+1
,y
i+1
)地理空间距离,k取值为1,2,
…
, floor(di/d),floor(*)表示向下取整。
22.然后,对轨迹所在地理空间进行网格划分,网格大小根据生成热力图的空间分辨率确定,例如可以选取当前层级比例尺下单个像素代表的地理空间距离为边长的正方形网格作为基本聚合空间单位,如图2(c)所示。
23.在上述网格内对密化的有向轨迹点集进行空间聚合,每个网格点最多得到一个聚合点,设密化后轨迹点集为t,某个网格g
mn
中心点坐标为(u
mn
,v
mn
),空间分辨率为δ,则落在该网格内的点集为:
该网格得到的聚合点位置为各点位置的算术平均值:其中k
mn
为g
mn
中点的数量。
24.聚合点的方向值(方向值是以北向为0,顺时针为正的角度值)计算方法如下:将0-360度角度区间,按方向角分辨率进行分区,设角分辨率为λ,角分辨率可取360度的n等分角,则n为分区个数(如λ取10,n取36),则第i方向角区间di为:则g
mn
中落入区间di的点集为:其中ak为点(xk,yk)的方向角,取落入点数最多的区间内各点角度平均值,得到聚合点方向值:经过上述聚合计算,得到聚合后的有向热力点数据集如图2(d)所示。
25.2)轨迹热力流向图的动态渲染方法经过上述步骤得到的聚合后的有向热力点集还需要进行轨迹热力流向图动态渲染,其渲染方法是根据有向热力点的权重和方向逐一进行渲染后,合成得到一幅完整的热力流向图。
26.其中单个热力点的渲染步骤为:a)根据该点位置坐标换算为屏幕坐标,确定该点绘制中心位置;b)根据该点权重值,确定该点绘制尺寸大小和颜色,权重越大的点绘制尺寸越大,颜色的亮度越高,透明度越低,具体尺寸和颜色可根据实际渲染效果选取;c)按一定帧率逐帧绘制该热力点的流向动画,如图3所示为一个11帧循环的动画
绘制例子,其中实心点为中心位置,箭头所示为该点方向,虚线表示的椭圆和小圆形分别表示该点方向的静态和动态绘制位置(实心点、箭头和虚线为辅助示意标志,不是实际绘制内容)。以该点位置中心绘制椭圆,椭圆长轴沿该点流动方向,以一个沿长轴方向逐帧运动的小圆形实现该点的运动动画,椭圆和小圆形均采用中心深边缘淡的渐变效果绘制。
27.经过上述动态渲染方法,可以利用空间聚合得到的离散有向点,生成表示连续动态轨迹的热力流向图。
28.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1