一种基于三维激光扫描隧道围岩信息的识别和提取方法
1.本发明涉及岩土工程技术领域,具体涉及一种基于三维激光扫描隧道围岩信息的识别和提取方法。
背景技术:
2.在隧道修建的过程中,需要对隧道进行检测和分析。目前,在隧道的检测与分析方面还仍在使用较为传统检测方法。随着工程技术的进步,对隧道施工的效率和安全等方面的要求也在逐步提升且越来越重视。怎样快速安全并且方便的监控隧道,得到隧道围岩的几何特征信息,已经是一个不可小觑的问题。
3.到目前为止,大多数隧道的检测与岩性分析都还停留在传统的方法,将控制点设置在洞壁,再利用全站仪、断面仪、收敛仪等仪器进行检测控制测量并且分析断面情况,再利用传统的人工经验得到围岩产状特征。虽然这些方法可以很直接得到真实可信的数据,但却会浪费人力资源且资源配置也会造成浪费,还会影响施工进度。在隧道的施工过程中,隧道开挖过后支护以前,大量的隧道围岩暴露出来,隧道会随着施工的进行而不断的变形,这就会使得布置的点位经常性的会被破坏掉,这样的话想要再次对隧道围岩进行数据采集,和先前采集的数据进行比对,就会很麻烦甚至会没有意义。
技术实现要素:
4.本发明意在提供一种基于三维激光扫描隧道围岩信息的识别和提取方法,能够解决现有技术中存在的隧道开挖过后支护以前,大量的隧道围岩暴露出来,会使得布置的围岩检测点位被破坏掉,不便于再次对隧道围岩进行数据采集、提取隧道围岩信息的技术问题。
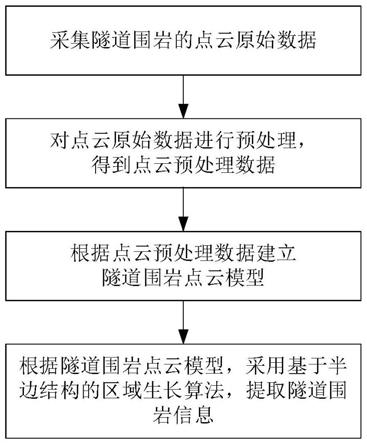
5.本发明提供的技术方案为:一种基于三维激光扫描隧道围岩信息的识别和提取方法,包括以下步骤:
6.s1:采集隧道围岩的点云原始数据;
7.s2:对点云原始数据进行预处理,得到点云预处理数据;
8.s3:根据点云预处理数据建立隧道围岩点云模型;
9.s4:根据隧道围岩点云模型,采用基于半边结构的区域生长算法,提取隧道围岩信息。
10.本发明的工作原理及优点在于:通过三维激光扫描采集隧道围岩的点云原始数据,采集过程受到施工现场的影响会导致有大量的噪声点和失真点存在,故需要对点云数据进行预处理以达到还原其真实性。根据点云预处理数据,采用表面模型重建或几何模型重建,建立隧道围岩点云模型,根据点云模型提取隧道围岩信息,基本能够还原掌子面的岩体特征,对于岩层走向、破碎等能够轻松识别,效果较好,细节较清晰。解决了现有技术中存在的隧道开挖过后支护以前,大量的隧道围岩暴露出来,会使得布置的围岩检测点位被破坏掉,不便于再次对隧道围岩进行数据采集、提取隧道围岩信息的问题。
11.进一步,步骤s1中采集隧道围岩的点云原始数据,包括:
12.s1-1:现场勘探;
13.s1-2:安装三脚架;
14.s1-3:安装三维激光扫描仪;
15.s1-4:设置三维激光扫描仪扫描参数;
16.s1-5:使用三维激光扫描仪采集点云原始数据。
17.针对施工现场的相对恶劣的拍摄环境,通过上述步骤能够获得效果较好的点云原始数据。
18.进一步,步骤s2中对点云原始数据进行预处理,包括:
19.s2-1:对点云原始数据进行拼接;
20.s2-2:对拼接后的点云数据进行失真点的删除;
21.s2-3:对删除失真点后的点云数据进行去噪;
22.s2-4:对去噪后的点云数据进行精简。
23.对点云原始数据分别进行拼接、失真点删除、去噪和精简处理,以达到还原其真实性,为后续工作提供支持。
24.进一步,步骤s2-1中选用标靶拼接或坐标拼接对点云原始数据进行拼接。
25.选用标靶拼接或坐标拼接对点云原始数据进行拼接。标靶拼接是在扫描区域放置标靶,在连接的时候就可以找到标靶的数据点,可以提高准确率,达到高精度效果。坐标拼接需要测量出标靶位置的大地坐标,按照大地坐标进行拼接。
26.进一步,步骤s2-2中选用弦高差方法或曲线检查法进行失真点的删除。
27.选用弦高差方法或曲线检查法来完成对失真点的删除。弦高差方法是通过测量被测点与其前后两点之间的连线弦的距离判断失真点;曲线检查法是运用最小二乘法拟合样条曲线,计算其与目标的距离判断。
28.进一步,步骤s2-3中对删除失真点后的点云数据进行去噪,包括有序点云去噪、无序点云去噪;
29.所述有序点云去噪选用最小二乘法滤波、卡尔曼滤波、邻域平均法或孤立点排异法进行去噪;
30.所述无序点云去噪选用八叉树法或空间单元表格法进行去噪。
31.对于有序的点云数据,由于点云数据中点与点之间的拓扑结构完整,所以在本实施例中,可选用最小二乘法滤波、卡尔曼滤波、邻域平均法、孤立点排异法进行有序点云数据的去噪。对于无序的点云数据,由于它们点与点之间的拓扑并未建立,只要在散乱的点之间建立拓扑结构即可进行去噪处理。在本实施例中,可选用八叉树法、空间单元表格法进行无序点云数据的去噪。
32.进一步,步骤s2-4中选用最小距离法、均匀采样法、包围盒法或网格法对去噪后的点云数据进行精简。
33.最小距离法的扫描线数据十分密集且曲率变化缓慢,效果较为明显。均匀采样法精简速度快且能节省大量时间。包围盒法简单而高效。网格法克服限制减少了点云数目,也可以通过控制网格大小保持物体的特征。
34.进一步,步骤s3中,根据点云预处理数据,采用表面模型重建或几何模型重建方法
建立隧道围岩点云模型。
35.表面模型重建先构造贴合目标物体的表面的网格,再将这些网格进行平滑拼接。几何模型重建利用被测物体的轮廓模型将它们进行拟合拼接,得到一个封闭的几何三维模型。
36.进一步,所述基于半边结构的区域生长算法,包括:
37.根据划分的三角网格选择一个种子三角形a;
38.根据半边链表寻找相反半边对应的相邻三角形b;
39.计算三角形a、三角形b的法向量夹角,对法向量夹角进行第一阈值判断;
40.计算三角形a与三角形b所在平面的平均法向量,对平均法向量进行第二阈值判断;
41.将三角形b添加到三角形a的平面集合中,
42.当相邻三角网格里的点云不满足第二阈值判断时,平面的生长完成;
43.提取出平面的点云集合。
44.基于半边结构的区域生长算法运用了半边结构的方案,根据半边链表寻找相反半边对应的三角网格数据,数据运算能力得到了很大的提升并以此实现相邻区域查询,不需要根据三角网数据判断边起点相同与否来查询相邻区域。基于半边结构的区域生长算法,可以实现高效高精度的生长,具有很强的实用性。
45.进一步,所述隧道围岩信息包括岩石种类、产状、破碎程度和光滑度。
46.基于三维激光扫描隧道围岩信息,可以提取出隧道围岩的岩石种类、产状、破碎程度和光滑度等信息。
附图说明
47.图1为本发明实施例的基于数字图像的隧道围岩信息提取方法的隧道围岩信息的识别与提取方法流程图;
48.图2为本发明实施例的基于数字图像的隧道围岩信息提取方法的基于半边结构的区域生长算法流程图。
具体实施方式
49.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
50.需要注意的是,除非另有说明,本技术使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
51.实施例:
52.本实施例提供了一种基于三维激光扫描隧道围岩信息的识别和提取方法,在本实施例中,隧道围岩信息包括:岩石种类、产状、破碎程度和光滑度。如图1所示,隧道围岩信息的识别和提取方法按照以下步骤进行:
53.s1:采集隧道围岩的点云原始数据
54.在具体的实施方式中,选用三维激光扫描仪对隧道围岩进行扫描,获得隧道围岩
的点云数据。三维激光扫描仪的型号可选用faro focuss 350,其具有超高精度和超高防护等级的特点,其扫描距离为70米。
55.点云原始数据的采集步骤如下:
56.s1-1:现场勘探
57.在采集点云原始数据之前,需要进行现场的实地调查,根据施工情况确定好扫描的站数与位置,保证减少其他物体的遮挡且扫描仪要在精度允许的测程内。
58.s1-2:安装三脚架
59.选择平稳的地面以便三脚架的安放,展开并将三脚架的支架固定,确保三脚架平稳。由于在隧道中会有大量的碎石和岩土,故要确保三脚架的是否固定完成,且要将其牢固在测站上。
60.s1-3:安装三维激光扫描仪
61.取出三维激光扫描仪并安装快卸装置,再将快卸装置连接至三脚架,通过调节三脚架和三维激光扫描仪的圆水准气泡使三维激光扫描仪保持水平。
62.s1-4:设置扫描参数
63.进入三维激光扫描仪主界面后,选择合适的参数进行设置,设置好亮度、精度扫描的角度与时间间距即可开始扫描。
64.s1-5:采集点云原始数据
65.在完成所有的前置工作后,就可以进行点云原始数据的采集,若是正常采集数据只需在不受外界条件影响下等待数据采集完毕即可。采集完毕后将三维激光扫描仪卸下装回到装运箱即可。
66.s2:对点云原始数据进行预处理,得到点云预处理数据
67.通过三维激光扫描仪采集得到的点云原始数据量庞大,并且在三维激光扫描仪工作期间会因为受到施工现场的影响会导致有大量的噪声点和失真点存在,故需要对点云数据进行预处理以达到还原其真实性,具体如下:
68.s2-1:对点云原始数据进行拼接
69.隧道是一个作用于地下的狭长的管状物,隧道在掘进是施工时,会有大量的干扰物,如人工、挖掘机、支架等一系列其他仪器和工具,若想得到隧道围岩的几何特征信息,对激光点云的精度要求非常高。利用三维激光扫描仪对掌子面进行扫描而得到点云数据,其密度受到扫描距离的影响尤其显著,三维激光扫描仪距离越远,会造成精度不够准确,以及末端的点云数据稀疏或是缺少;相反,距离太近的话会造成点云密度过高。因此,为了得到完整的数据需要进行分站扫描,然后将多站点云数据进行拼接。
70.多测站扫描的点云数据均处于扫描仪坐标系中,点云拼接是将两个或多个的处于激光扫描仪坐标的点云数据统一归算到一个坐标系中的过程。通过平移和旋转将多个扫描站点云数据(xn,yn,zn)转换到同一坐标系(x,y,z)中,利用点云拼接模型计算3个旋转参数和3个平移参数即可。
71.在本实施例中,选用标靶拼接或坐标拼接对点云原始数据进行拼接。标靶拼接是在扫描区域放置标靶,在连接的时候就可以找到标靶的数据点,可以提高准确率,达到高精度效果。坐标拼接需要测量出标靶位置的大地坐标,按照大地坐标进行拼接。
72.在本步骤中,对点云原始数据进行拼接后,将多个扫描站的点云数据转换到同一
坐标系,也同时完成了对点云数据的配准。
73.s2-2:对拼接后的点云数据进行失真点的删除
74.掘进施工中的隧道会有许多干扰会影响扫描工作,虽然在数据采集的过程中会停止施工,但是仍然会有一部分支架、管线、电缆和配电箱等会干扰,在采集时,各种仪器设备和人员也会被记录到数据中,这些点云是不需要的,所以需要进行删除失真点的处理。
75.在本实施例中,选用弦高差方法或曲线检查法来完成对失真点的删除。弦高差方法是通过测量被测点与其前后两点之间的连线弦的距离判断失真点;曲线检查法是运用最小二乘法拟合样条曲线,计算其与目标的距离判断。
76.s2-3:对删除失真点后的点云数据进行去噪
77.在具体的实施方式中,对删除失真点后的点云数据进行去噪,包括有序点云去噪与无序点云去噪。
78.对于有序的点云数据,由于点云数据中点与点之间的拓扑结构完整,所以在本实施例中,可选用最小二乘法滤波、卡尔曼滤波、邻域平均法、孤立点排异法进行有序点云数据的去噪。
79.对于无序的点云数据,由于它们点与点之间的拓扑并未建立,只要在散乱的点之间建立拓扑结构即可进行去噪处理。在本实施例中,可选用八叉树法、空间单元表格法进行无序点云数据的去噪。
80.s2-4:对去噪后的点云数据进行精简
81.为了减少数据的冗余,减少软件处理数据的时间和提高效率,在能够保证点云数据精度的前提下要再次对数据进行精简。在本实施例中,选用最小距离法、均匀采样法、包围盒法或网格法对去噪后的点云数据进行精简。
82.最小距离法的扫描线数据十分密集且曲率变化缓慢,效果较为明显。均匀采样法精简速度快且能节省大量时间。包围盒法简单而高效。网格法克服限制减少了点云数目,也可以通过控制网格大小保持物体的特征。
83.s3:根据点云预处理数据建立隧道围岩点云模型
84.在本实施中,根据点云预处理数据,采用表面模型重建或几何模型重建,建立隧道围岩点云模型。表面模型重建先构造贴合目标物体的表面的网格,再将这些网格进行平滑拼接。几何模型重建利用被测物体的轮廓模型将它们进行拟合拼接,得到一个封闭的几何三维模型。在具体的实施方式中,选用faro scene 2019软件进行建模。
85.s4:根据隧道围岩点云模型,采用基于半边结构的区域生长算法,提取隧道围岩信息
86.区域生长算法首先根据划分的三角网格选择一个种子三角形,然后根据各个三角网格的之间的关系确定它们向外的生长规则。当相邻三角网格里的点云无查询或者不符合规则时,则该平面的生长完成,并且提取出了结构面的点云集合。
87.基于半边结构的区域生长算法运用了半边结构的方案,根据半边链表寻找相反半边对应的三角网格数据,数据运算能力得到了很大的提升并以此实现相邻区域查询,不需要根据三角网数据判断边起点相同与否来查询相邻区域。基于半边结构的区域生长算法,可以实现高效高精度的生长,具有很强的实用性。在具体的实施方式中,选择种子三角形时优选位置居中的,平均法向量和三角形法向量夹角偏小的,角度阀值也偏小的。具体的,如
图2所示,包括:
88.根据划分的三角网格选择一个种子三角形a;
89.根据半边链表寻找相反半边对应的相邻三角形b;
90.计算三角形a、三角形b的法向量夹角,对法向量夹角进行第一阈值判断;
91.计算三角形a与三角形b所在平面的平均法向量,对平均法向量进行第二阈值判断;
92.将三角形b添加到三角形a的平面集合中,
93.当相邻三角网格里的点云不满足第二阈值判断时,平面的生长完成;
94.提取出平面的点云集合。
95.采用基于半边结构的区域生长算法,可以提取出隧道围岩的岩石种类、产状、破碎程度和光滑度。采用本实施例的技术方案提取的隧道围岩信息,与实地勘测相比较,效果对比如下表1所示:
96.表1
[0097][0098][0099]
从上表中可以看出,采用本实施例的技术方案提取的隧道围岩信息,与实地勘测获得的地质信息基本一致。
[0100]
通过采用本实施例的技术方案,可以根据三维激光扫描得到的点云数据建立隧道围岩点云模型,根据点云模型提取隧道围岩信息,基本能够还原掌子面的岩体特征,对于岩层走向、破碎等能够轻松识别,效果较好,细节较清晰。
[0101]
以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术得出的启示下,结合自身能力完善并实施本方
案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1