支气管软镜训练方法、电子设备及存储介质
1.本技术涉及器械训练领域,特别涉及一种支气管软镜训练方法、电子设备及存储介质。
背景技术:
2.支气管软镜是一种经口或鼻置入患者呼吸道,既可用于全麻气管插管的引导,也可用于做肺叶、段及亚段支气管病变的观察、采集组织样本,配合tv系统可进行摄影、示教和动态记录的医疗器械。支气管软镜是全身麻醉气管插管所用到的重要工具,目前国际上各版本的困难气道处理指南中都将其推荐为处理困难气道的首选,且进行清醒气管插管时,首选工具也是支气管软镜。但由于其操作技术难度高,学习周期长,导致很多临床麻醉医生不能掌握该技术,也不能发挥其在临床麻醉及气道管理中的重要价值。
3.支气管软镜包括纤维支气管镜和电子支气管镜,均可用于气管导管插入气管内的引导。纤维支气管镜的基本组成部分是玻璃纤维束,每束纤维直径为8~12μm,外包第2层玻璃,即外膜。软镜操作时,需精细控制,在镜下辨认患者的生理结构或异常变形的病理结构,并在手眼高度协调操作下将软镜送达目标位置。因此,使用纤维支气管镜时对操作者的手法要求极高。
4.在支气管软镜的教学中,镜体的握持手法、精准控制视野水平前进、后退、左右旋转、上下左右摆动等最基本的操作,是每一位练习者应当最先掌握的技能,随后还需在人体生理结构及病理结构中进行训练,利用基本动作的组合合理规避障碍,以期尽量减少损伤患者的风险。
5.然而,目前缺乏科学和系统的支气管软镜训练方法,训练效果往往不佳,若采用人工带教训练会导致训练成本较高,因此亟需研发一套科学、高效和递进式的支气管软镜训练体系。
技术实现要素:
6.本发明的目的在于解决目前缺乏科学的支气管软镜训练方法,训练效果不佳,若采用人工带教训练会导致训练成本较高的问题。本发明提供了一种支气管软镜训练方法,用户依次通过支气管软镜理论培训课程的考核,支气管软镜操控换向训练装置的考核,支气管软镜操控目标孔不移动训练箱的考核,支气管软镜操控目标孔移动智能训练箱的考核,支气管软镜实景模拟人体无肿物训练装置的考核,支气管软镜实景模拟人体有肿物、分泌液训练装置的考核,之后,即通过了整个支气管软镜训练方法的培训考核,熟练掌握了支气管软镜的使用方法。本发明的支气管软镜训练方法,有效保证了训练效果,实现了在无导师指导下,用户自主完成支气管软镜的操作训练和考核,降低了训练成本。
7.为解决上述技术问题,本发明的实施方式公开了一种支气管软镜训练方法,包括:提供支气管软镜理论培训课程;提供支气管软镜操控初级培训课程;提供支气管软镜操控中级培训课程;提供支气管软镜操控高级培训课程;提供正常气道解剖患者全麻支气管软
镜引导插管的理论课程;提供异常气道解剖患者清醒支气管软镜引导插管的理论课程;通过支气管软镜培训考核;支气管软镜操控初级培训课程包括:介绍支气管软镜操控换向训练装置的使用方法及得分目标;支气管软镜操控中级培训课程包括:介绍支气管软镜操控目标孔不移动训练箱的使用方法及得分目标;支气管软镜操控高级培训课程包括:介绍支气管软镜操控目标孔移动智能训练箱的使用方法及得分目标;正常气道解剖患者全麻支气管软镜引导插管的理论课程包括:介绍支气管软镜实景模拟人体无肿物训练装置的使用方法及得分目标;异常气道解剖患者清醒支气管软镜引导插管的理论课程包括:介绍支气管软镜实景模拟人体有肿物、分泌液训练装置的使用方法及得分目标。
8.采用上述技术方案,有效保证了支气管软镜的训练效果,使用户全面掌握支气管软镜的前进、后退、左右旋转、上下左右摆动,提升对支气管软镜使用的熟练度,实现了在无导师指导下,用户自主完成支气管软镜的操作训练和考核,降低了训练成本。
9.根据本发明的另一具体实施方式,提供支气管软镜理论培训课程之后,进行支气管软镜理论考试,得到支气管软镜理论考试的得分,并判断支气管软镜理论考试的得分是否≥第一预设值,其中,当支气管软镜理论考试的得分<第一预设值时,提供支气管软镜理论培训课程,当支气管软镜理论考试的得分≥第一预设值时,提供支气管软镜操控初级培训课程;
10.提供支气管软镜操控初级培训课程之后,进行支气管软镜操控初级训练模型考试,得到支气管软镜操控初级训练模型考试的得分,并判断支气管软镜操控初级训练模型考试的得分是否达到第二预设值,其中,当支气管软镜操控初级训练模型考试的得分未达到第二预设值时,提供支气管软镜操控初级培训课程,当支气管软镜操控初级训练模型考试的得分达到第二预设值时,提供支气管软镜操控中级培训课程;
11.提供支气管软镜操控中级培训课程之后,进行支气管软镜操控中级训练模型考试,得到支气管软镜操控中级训练模型考试的得分,并判断支气管软镜操控中级训练模型考试的得分是否达到第三预设值,其中,当支气管软镜操控中级训练模型考试的得分未达到第三预设值时,提供支气管软镜操控中级培训课程,当支气管软镜操控中级训练模型考试的得分达到第三预设值时,提供支气管软镜操控高级培训课程;
12.提供支气管软镜操控高级培训课程之后,进行支气管软镜操控高级训练模型考试,得到支气管软镜操控高级训练模型考试的得分,并判断支气管软镜操控高级训练模型考试的得分是否达到第四预设值,其中,当支气管软镜操控高级训练模型考试的得分未达到第四预设值时,提供支气管软镜操控高级培训课程,当支气管软镜操控高级训练模型考试的得分达到第四预设值时,提供正常气道解剖患者全麻支气管软镜引导插管的理论课程;
13.提供正常气道解剖患者全麻支气管软镜引导插管的理论课程之后,进行实景初级训练模型考试,得到实景初级训练模型考试的得分,并判断实景初级训练模型考试的得分是否达到第五预设值,其中,当实景初级训练模型考试的得分未达到第五预设值时,提供正常气道解剖患者全麻支气管软镜引导插管的理论课程,当实景初级训练模型考试的得分达到第五预设值时,提供异常气道解剖患者清醒支气管软镜引导插管的理论课程;
14.提供异常气道解剖患者清醒支气管软镜引导插管的理论课程之后,进行实景高级训练模型考试,得到实景高级训练模型考试的得分,并判断实景高级训练模型考试的得分
是否达到第六预设值,其中,当实景高级训练模型考试的得分未达到第六预设值时,提供异常气道解剖患者清醒支气管软镜引导插管的理论课程,当实景高级训练模型考试的得分达到第六预设值时,通过支气管软镜培训考核。
15.根据本发明的另一具体实施方式,支气管软镜操控初级训练模型是支气管软镜操控换向训练装置,支气管软镜包括镜头、可弯曲部、镜身、握持手柄、操作扳机和显示屏,支气管软镜操控换向训练装置包括:壳体,壳体内具有中空腔室,中空腔室底面上设有指示部件;插入口,插入口设于壳体的顶部且与中空腔室连通,以使镜身能进入中空腔室内;
16.中空腔室内还设有固定于壳体的隔板,隔板上设有与插入口相对的小孔,使镜身穿过隔板后保持竖直;
17.插入口和/或小孔的直径为镜身截面直径的1.2倍~2.5倍;
18.插入口或小孔的直径为8mm~10mm;
19.指示部件包括间隔设置并环绕插入口和/或小孔在底面上投影的第一指示部件;
20.第一指示部件按钟表方位设置;
21.指示部件包括位于插入口和/或小孔在底面上投影的第二指示部件;
22.中空腔室底面还设有第一指示灯,第一指示灯与第一指示部件和/或第二指示部件对应设置,用于指示第一指示部件和/或第二指示部件的方位;
23.中空腔室周边设有感应组件,当感应组件感应到镜身靠近第一指示部件和/或第二指示部件时,与第一指示部件和/或第二指示部件对应的第一指示灯熄灭;
24.壳体不透明,壳体外表面还设有提醒装置,提醒装置可表现第一指示灯的明暗状态;
25.提醒装置为第二指示灯;
26.壳体还包括底座,底座设置于中空腔室下部,底座外侧设有按钮,底座内设有控制模块,控制模块与按钮、第一指示灯、第二指示灯和感应组件连接,用于根据按钮启动或关闭训练装置,并根据感应组件的信号控制第一指示灯或第二指示灯的亮暗。
27.根据本发明的另一具体实施方式,支气管软镜操控换向训练装置的使用方法及得分目标包括:
28.支气管软镜操控换向训练装置的使用方法包括:按下按钮后,将支气管软镜通过插入口竖直放入中空腔室内,当第二指示部件的感应组件感应到镜身后,中空腔室底面上的数字对应的第一指示灯会亮起,当操作者看到壳体上的第二指示灯亮起后,训练者应将镜头向数字的相应方向进行转向;当镜头向正确的方向转向后,该数字相应的感应组件会感应到镜身并熄灭其对应的第一指示灯,即操作者完成一次训练;完成一次训练后,第二指示部件的第一指示灯会亮起以提示操作者将支气管软镜回到初始状态,操作者需要将镜头转回到第二指示部件的位置,当第二指示部件的感受组件感应到镜身后熄灭其对应的第一指示灯,中空腔室底面上的另一数字对应的第一指示灯会亮起,在训练过程中,第一指示灯和第二指示灯随机亮起;
29.支气管软镜操控换向训练装置的得分目标包括:重复上述操作步骤,直至完成十二个方向的转向训练;
30.支气管软镜操控换向训练装置的得分目标是第二预设值。
31.根据本发明的另一具体实施方式,支气管软镜操控中级训练模型是支气管软镜操
控目标孔不移动训练箱,支气管软镜操控目标孔不移动训练箱包括:装置本体和平行设置于装置本体内部的多个隔板,装置本体的前侧板设有一个通孔,每个隔板上均设置有至少一个通孔,支气管软镜智能训练装置还包括:
32.检测装置,分别设置在每个通孔处,用于当支气管软镜穿过通孔时,发出检测信号;
33.控制模块,与检测装置连接,用于接收检测信号,并根据检测信号判断各通孔处是否有支气管软镜穿过;
34.支气管软镜操控目标孔不移动训练箱还包括计时模块,与控制模块连接,当控制模块判断为支气管软镜穿过通孔时,向计时模块发送计时信号,计时模块根据计时信号记录支气管软镜穿过通孔的时刻;
35.计时模块还用于将记录的时刻传送至控制模块,控制模块根据时刻计算支气管软镜从穿过前侧板上的通孔至穿过靠近装置本体的后侧板的隔板上的通孔的时间,和/或,计算穿过两个隔板的通孔所耗费的时间;
36.支气管软镜操控目标孔不移动训练箱还包括用于设定练习模式和考核模式的模式设定模块,模式设定模块与控制模块连接;
37.支气管软镜操控目标孔不移动训练箱还包括显示模块,与模式设定模块连接,用于显示模式设定模块的练习模式和考核模式以供操作者选择;
38.显示模块,与控制模块连接,用于显示各通孔处是否有支气管软镜穿过。
39.根据本发明的另一具体实施方式,支气管软镜操控目标孔不移动训练箱的使用方法及得分目标包括:
40.支气管软镜操控目标孔不移动训练箱的使用方法包括:支气管软镜操控目标孔不移动训练箱可以用于训练目的也可以用于考核目的;在操作者使用该支气管软镜操控目标孔不移动训练箱时,显示模块的屏幕上显示练习模式和考核模式,以供操作者选择;当操作者选择练习模式时,操作者首先要确定目标,确定支气管软镜要看到标示板上的哪个字母;确定好之后,显示模块的屏幕分两部分,并列显示所有通孔,其中一部分将支气管软镜要到达指定字母所需要穿过的通孔以不同颜色显示出来,供操作者参考;另一部分实时显示支气管软镜所穿过的通孔并以不同颜色显示出来,当操作者操作支气管软镜穿过指定的通孔时,显示模块的实时显示部分改变穿过的通孔颜色,以表示已经穿过了该通孔;如果操作者穿过的不是指定通孔,则显示模块上会显示所穿过的通孔,操作者发现错误,可以重新进行操作;
41.计时模块记录穿过的时刻,从而控制模块可以计算从穿过前侧板的第一个通孔开始到最后一个隔板的通孔所用的时间,还可以计算穿过任意两个隔板上的通孔所用的时间,并可以将时间显示在显示模块上;
42.例如,在练习模式下,选择指定字母a之后,所有通孔的颜色为红色,但是显示模块上参考使用的、与到达该字母的通孔相对应的显示位置变为绿色;显示模块还并列显示支气管软镜的实时位置,当检测装置检测到支气管软镜穿过指定通孔时,该通孔相对应的显示位置变为绿色;通过比较这两部分显示的画面,操作者能够观察到操作是否正确,以及出现错误的位置;
43.当操作者选择考核模式时,显示模块的屏幕上显示随机生成的字母的顺序,操作
者需要按顺序操作使支气管软镜到达指定字母所对应的通孔;屏幕上将所有通孔显示出来,并且实时显示支气管软镜所穿过的通孔;
44.支气管软镜操控目标孔不移动训练箱的得分目标包括:显示模块的屏幕上显示随机生成的字母的顺序,操作者按顺序操作,并在计时模块指定的时间内使支气管软镜到达所有指定字母所对应的通孔;
45.支气管软镜操控目标孔不移动训练箱的得分目标是第三预设值。
46.根据本发明的另一具体实施方式,支气管软镜操控高级训练模型是支气管软镜操控目标孔移动智能训练箱,支气管软镜操控目标孔移动智能训练箱包括:
47.箱体,箱体的侧壁上设有通孔;安装板组件,设于箱体内,安装板组件上设有目标孔;驱动机构,设于箱体上,用于驱动目标孔产生相对于箱体的移动;
48.安装板组件包括:安装板,设于箱体内,安装板上设有让位槽;滑槽,设于安装板上;移动板,设于滑槽内,目标孔设于移动板上,目标孔与让位槽的位置相对应,驱动机构与移动板相连,驱动机构用于驱动移动板沿滑槽往复滑动;
49.驱动机构包括:磁铁,设于移动板上;电磁铁,设于箱体的内壁上,电磁铁与磁铁的位置相对应;
50.移动板与箱体之间设有弹性件,弹性件用于对移动板的运动进行缓冲,弹性件为弹簧;
51.箱体的内壁上设有多个插块组,每个插块组包括两个沿第一方向间隔设置的插块,安装板插装于插块组的两个插块之间的间隙中;
52.安装板组件的数量为多个,各安装板组件沿第一方向依次排列;
53.相邻两安装板组件上的目标孔的运动方向相反;
54.各安装板组件上设有的目标孔的数量沿第一方向依次增多;
55.各安装板组件上设有的目标孔的数量沿第一方向依次为整数倍递增关系;
56.安装板组件的数量为四个,沿第一方向依次为第一安装板组件、第二安装板组件、第三安装板组件和第四安装板组件,第一安装板组件上的目标孔的数量为一个,第二安装板组件上的目标孔的数量为两个,第三安装板组件上的目标孔的数量为四个,第四安装板组件上的目标孔的数量为十六个;
57.第二安装板组件与第三安装板组件之间设有第一隔板,第三安装板组件与第四安装板组件之间设有第二隔板,第四安装板组件与箱体侧壁之间设有第三隔板,第一隔板将第二安装板组件上的目标孔和第三安装板组件上的目标孔平均分隔至两个区域内,第二隔板将第三安装板组件上的目标孔和第四安装板组件上的目标孔平均分隔至四个区域内,第三隔板将第四安装板组件上的目标孔平均分隔至十六个区域内;
58.支气管软镜操控目标孔移动智能训练箱还包括十六个标识板,标识板设于与第四安装板组件相邻且平行的箱体的内壁上,各标识板的位置分别与第四安装板组件上的各目标孔的位置相对应。
59.根据本发明的另一具体实施方式,支气管软镜操控目标孔移动智能训练箱的使用方法及得分目标包括:
60.支气管软镜操控目标孔移动智能训练箱的使用方法包括:启动驱动机构,使驱动机构带动移动板产生晃动,随后训练者将支气管软镜先后穿入通孔与第一安装板组件上的
目标孔中;
61.在穿过第一安装板组件后,训练者在镜下能观察到第二安装板组件上设置的两个目标孔,训练者根据预先设置的标准插管路径,选择其中一个目标孔,并将支气管软镜插入该目标孔中;
62.在穿过第二安装板组件后,训练者在镜下能观察到第三安装板组件上设置的两个目标孔(第三安装板组件上设有四个目标孔,由于被第一隔板平均分隔至两个区域,因此穿过第二安装板组件上的某一个穿接孔后,只能看到第三安装板组件上的两个目标孔),训练者根据预先设置的标准插管路径,选择其中一个目标孔,并将支气管软镜插入该目标孔中;
63.在穿过第三安装板组件后,训练者在镜下能观察到第四安装板组件上设置的四个目标孔(第四安装板组件上设有十六个目标孔,由于被第二隔板平均分隔至四个区域,因此穿过第三安装板组件上的某一个穿接孔后,只能看到第四安装板组件上的四个目标孔),训练者根据预先设置的标准插管路径,选择其中一个目标孔,并将支气管软镜插入该目标孔中;
64.在穿过第四安装板组件后,训练者在镜下能观察到与最后穿过的目标孔所对应的标识板(标识板共有十六个,由于被第三隔板平均分隔至十六个区域,即每个区域内仅有一个标识板,因此穿过第四安装板组件中的某一个目标孔后,仅能看到与该目标孔所对应的标识板),通过观看标识板上的标记,即可知道自己所完成的插管路径是否正确;
65.支气管软镜操控目标孔移动智能训练箱的得分目标包括:训练者操作支气管软镜依次穿过十六个目标孔,看到目标孔所对应的标识板;
66.支气管软镜操控目标孔移动智能训练箱的得分目标是第四预设值。
67.根据本发明的另一具体实施方式,实景初级训练模型是支气管软镜实景模拟人体无肿物训练装置,支气管软镜实景模拟人体无肿物训练装置包括:底座;替换模组,可拆卸安装于底座上,替换模组内设有第一人体组织模型;
68.底座上还设有头部模型,头部模型内部设有内腔,第一人体组织模型内部具有第一腔体,当替换模组安装于底座上时,内腔与第一腔体相连通;
69.底座上设有安装槽,替换模组可插入到安装槽内部;
70.安装槽的开口设于底座侧面;
71.底座上还设有固定模型,固定模型上设有第二人体组织模型,当替换模组安装于底座上时,替换模组位于头部模型与固定模型之间;
72.第二人体组织模型内部具有第二腔体,当替换模组安装于底座上时,第一腔体与第二腔体相连通;
73.替换模组与底座或头部模型或固定模型之间设有固定装置,固定装置用于对替换模组进行固定;
74.底座上设有固定槽,替换模组可装入固定槽中;
75.第一人体组织模型包括第一模拟气管和第一模拟食管,第一腔体包括第一模拟气管的管道腔和第一模拟食管的管道腔;
76.内腔包括鼻腔、口腔、咽部腔体和喉部腔体;
77.第二人体组织模型包括第二模拟气管、第二模拟食管和模拟肺,模拟肺连接于第二模拟气管的端部,第二腔体包括第二模拟气管和第二模拟食管的管道腔;
78.支气管软镜实景模拟人体无肿物训练装置还包括控制系统,气管插管工具伸入人体的一端设有传感器,传感器与控制系统电连接;
79.传感器为压力传感器,控制系统还电连接有报警装置,当压力传感器检测到的压力值大于预设压力值时,报警装置进行报警。
80.根据本发明的另一具体实施方式,支气管软镜实景模拟人体无肿物训练装置的使用方法及得分目标包括:
81.支气管软镜实景模拟人体无肿物训练装置的使用方法包括:首先练习者挑选想要练习的替换模组安装在底座上,然后练习者持支气管软镜从鼻腔或口腔进入替换模型中的第一模拟气管,看到第一模拟气管即完成了气管插管;当支气管软镜碰触到内腔或第一腔体腔壁时,压力传感器检测到的压力值增大;当压力值大于预设压力值时,报警装置产生报警,从而对训练者进行提示,锻炼训练者在插管过程中避免将气管插管工具与气道腔壁接触;
82.支气管软镜实景模拟人体无肿物训练装置的得分目标包括:练习者持支气管软镜从鼻腔或口腔进入替换模型中的第一模拟气管,在报警装置不产生报警的情况下,看到第一模拟气管;
83.支气管软镜实景模拟人体无肿物训练装置的得分目标是第五预设值。
84.根据本发明的另一具体实施方式,实景高级训练模型是支气管软镜实景模拟人体有肿物、分泌液训练装置,支气管软镜实景模拟人体有肿物、分泌液训练装置是在支气管软镜实景模拟人体无肿物训练装置上改进得到的,支气管软镜实景模拟人体有肿物、分泌液训练装置还包括:第一腔体的内壁上设有模拟肿物;
85.第一腔体内壁上还设有喷液腔体,喷液腔体远离第一腔体的一端连接有连接管,连接管的另一端连接有储液盒,储液盒用于盛装液体,连接管上设有阀门;
86.喷液腔体贯穿模拟肿物;
87.替换模组上设有振动电机,替换模组与底座之间设有弹性件,振动电机用于带动替换模组上下振动;
88.弹性件为弹簧;
89.咽部腔体或喉部腔体的内壁上设有气囊,气囊连接有气管,头部模型上开设有让位孔,气管从让位孔中穿出至头部模型外部,气管位于头部模型外部的一端连接有气泵,气管上设有换向阀;
90.底座上还设有播音器,播音器用于播放干扰音;
91.还包括遥控器,遥控器用于控制播音器开关以及调节干扰音大小;
92.遥控器上设有计时器,计时器用于为训练者计时。
93.根据本发明的另一具体实施方式,支气管软镜实景模拟人体有肿物、分泌液训练装置的使用方法及得分目标包括:
94.支气管软镜实景模拟人体有肿物、分泌液训练装置的使用方法包括:首先,练习者挑选想要练习的替换模组安装在底座上,然后练习者持支气管软镜从鼻腔或口腔进入替换模型中的第一模拟气管,看到第一模拟气管即完成了气管插管;其间,可由旁观者使用遥控器为练习者计时或打开干扰音,或开启振动电机带动替换模组振动,或开启阀门向第一腔体内喷射液体,或开启气泵和换向阀使气囊充气或排气,或监测报警装置是否因支气管软
镜与内腔或第一腔体碰触而产生报警,从而增强训练难度;
95.支气管软镜实景模拟人体有肿物、分泌液训练装置的得分目标包括:在有计时限制、干扰音、替换模组振动、第一腔体的内壁上设有模拟肿物、第一腔体内喷射液体模拟分泌液的条件下,练习者持支气管软镜从鼻腔或口腔进入替换模型中的第一模拟气管,在报警装置不产生报警的情况下,看到第一模拟气管;
96.支气管软镜实景模拟人体有肿物、分泌液训练装置的得分目标是第六预设值。
97.根据本发明的另一具体实施方式,在提供支气管软镜理论培训课程之前,包括:输入用户确认信息,提供对用户关于支气管软镜熟识度进行调查评估的试题;在用户完成调查评估后,提供支气管软镜理论培训课程。
98.本发明的实施方式还公开了一种电子设备,包括:存储器,用于存储由电子设备的一个或多个处理器执行的指令;处理器,当处理器执行存储器中的指令时,可使得电子设备执行支气管软镜训练方法。
99.采用上述技术方案,用户可以在电子设备上进行支气管软镜训练方法的学习,不受学习环境限制。
100.本发明的实施方式还公开了一种计算机可读存储介质,计算机可读存储介质上存储有指令,该指令在计算机上执行时使计算机执行支气管软镜训练方法。
附图说明
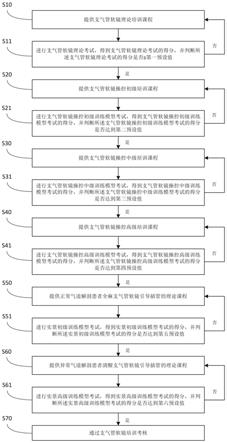
101.图1是本发明实施例一种支气管软镜训练方法的流程示意图。
102.图2是支气管软镜的整体结构示意图。
103.图3是支气管软镜操控换向训练装置的整体结构示意图。
104.图4是支气管软镜操控目标孔不移动训练箱的整体结构示意图。
105.图5是支气管软镜操控目标孔不移动训练箱的标示板的示意图。
106.图6是支气管软镜操控目标孔移动智能训练箱的整体结构示意图。
107.图7是支气管软镜操控目标孔移动智能训练箱的带目标孔标示板的局部示意图。
108.图8是支气管软镜实景模拟人体无肿物训练装置的整体结构示意图。
109.图9是支气管软镜实景模拟人体有肿物、分泌液训练装置的结构示意图。
110.图10是支气管软镜实景模拟人体有肿物、分泌液训练装置的半剖示意图。
具体实施方式
111.以下由特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。虽然本发明的描述将结合较佳实施例一起介绍,但这并不代表此发明的特征仅限于该实施方式。恰恰相反,结合实施方式作发明介绍的目的是为了覆盖基于本发明的权利要求而有可能延伸出的其它选择或改造。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
112.在本实施例的描述中,需要说明的是,术语“上”、“下”、“内”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
113.术语“第一”、“第二”、“第三”、“第四”、“第五”、“第六”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
114.在本实施例的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实施例中的具体含义。
115.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
116.清醒气管内插管是指为保持呼吸道通畅,及时吸出气管内痰液或血液,防治患者缺氧和二氧化碳积蓄进行有效的人工或机械通气。支气管软镜是一种经口或鼻置入患者下呼吸道,用于做肺叶、段及亚段支气管病变的观察,活检采样,细菌学、细胞学检查、配合tv系统可进行摄影,示教和动态记录的医疗器械。例如用气管导管插入胸壁之切口到胸腔内,进行引导,支气管软镜沿气管导管进入胸腔内。为保证清醒插管顺利进行,手法应尽可能轻巧、缓慢和正确,因此,对操作者操作支气管软镜进行清醒插管的操作手法要求很高。
117.以下对支气管软镜训练方法进行说明,但本技术不限于此,训练方法也适用于其他器械,例如,输尿管支气管软镜、胆道镜、胃镜、肠镜等柔性内窥镜器械。
118.如图1所示,本发明的支气管软镜训练方法包括以下步骤:
119.步骤s10:提供支气管软镜理论培训课程。
120.支气管软镜理论培训课程是对支气管软镜进行全面介绍的基础理论课程,包括:发展历史、分类、使用范围、禁忌症、注意事项、并发症、高危人群、应用等。
121.步骤s11:进行支气管软镜理论考试,得到支气管软镜理论考试的得分,并判断所述支气管软镜理论考试的得分是否≥第一预设值。
122.用户学习支气管软镜理论培训课程后进行考试,考试内容包括对支气管软镜理论知识的掌握情况,例如以选择题形式考试或以填空题形式考试等。考试后得到支气管软镜理论考试的得分,若支气管软镜理论考试的得分≥第一预设值,则进入支气管软镜操控初级培训课程的学习,否则继续学习支气管软镜理论培训课程。这里,第一预设值为80分,即用户支气管软镜理论考试的及格分数是80分,本技术对第一预设值的定义不作要求,可根据实际应用情况进行自主设置。
123.步骤s20:提供支气管软镜操控初级培训课程。
124.支气管软镜操控初级培训课程包括:介绍支气管软镜操控换向训练装置的使用方法及得分目标。
125.支气管软镜操控换向训练装置的具体结构如下所述:
126.如图2所示,支气管软镜1200包括镜头1201、可弯曲部1202、镜身1203、握持手柄1204、操作扳机1205和显示屏1206。镜身1203为柔软管型结构,镜身1203头端为安置摄像头的镜头1201,镜头1201拍摄内容可在显示屏1206上显示;当向下按压操作扳机1205时,镜身1203的可弯曲部1202会向上弯曲约90
°
,向上推动操作扳机1205时,可弯曲部1202会向下弯曲约90
°
。通过操作支气管软镜1200的可弯曲部1202的折弯及握持手柄1204的转向,即可使支气管软镜1200头部转向各不同方向。
127.如图3所示,支气管软镜操控换向训练装置1100包括:壳体1111,壳体1111内具有中空腔室1112,中空腔室1112底面上设有指示部件1113;插入口1114,插入口1114设于壳体1111的顶部且与中空腔室1112连通,以使镜身1203能进入中空腔室1112内。
128.操作者可以将支气管软镜1200通过插入口1114伸入支气管软镜操控换向训练装置1100中,并操作支气管软镜1200的可弯曲部1202的折弯和转动握持手柄1204以控制支气管软镜1200的转向,使支气管软镜1200的镜头1201按照指示部件的指示运动。操作者可通过训练装置练习运用支气管软镜1200向各不同方向转向的手法,且壳体1111内为中空腔室1112,支气管软镜1200在中空腔室1112内不易触碰到壳体1111,进一步保护了支气管软镜1200不受损伤。
129.如图3所示,中空腔室1112内还设有固定于壳体1111的隔板1115,隔板1115上设有与插入口1114相对的小孔1151,使镜身1203穿过隔板11151后保持竖直。通过插入口1114和小孔1151固定镜身1203,使操作者在使用训练装置练习时,保证支气管软镜1200始终处于竖直状态,操作者只能通过握持手柄1204改变镜头1201的转向、通过操作扳机1205控制可弯曲部1202的弯曲。
130.如图3所示,插入口1114和/或小孔1151的直径为镜身1203截面直径的1.2倍~2.5倍,插入口1114或小孔1151的直径为8mm~10mm。支气管软镜1200的镜身1203的截面直径为4-6mm,因此插入口1114和小孔1151不会对镜身1203造成过度摩擦。
131.指示部件1113包括间隔设置并环绕插入口1114和/或小孔1151在底面上投影的第一指示部件1131。第一指示部件1131沿周向等间距分布。第一指示部件1131为按钟表方位设置的数字。
132.指示部件1113还包括位于插入口1114和/或小孔1151在底面上投影的第二指示部件1132。当支气管软镜1200穿过插入口1114和小孔1151时呈竖直状态,此时即为支气管软镜1200的初始状态。当支气管软镜1200处于初始状态时,支气管软镜1200的镜头1201会拍摄到第二指示部件1132但不会拍摄到第一指示部件1131,因此支气管软镜1200的显示屏1206上仅示出第二指示部件1132,从而提示操作者此时支气管软镜1200处于初始状态,可以开始进行下一步训练操作。当操作者根据第一指示部件1131的提示操作支气管软镜1200的镜头1201到第一指示部件1131处时,镜头1201只会拍摄到第一指示部件1131而不会拍摄到第二指示部件1132,因此支气管软镜1200的显示屏1206上仅示出第一指示部件1131,此时操作者完成了一次训练。操作者需要返回初始状态进行下一次训练。
133.中空腔室1112底面还设有第一指示灯1116。第一指示灯1116与第一指示部件1131对应设置用于指示第一指示部件1131的方位,第一指示灯1116还与第二指示部件1132对应设置用于指示第二指示部件1132的方位。当第一指示灯1116亮起时,即为通知操作者将支气管软镜1200的镜头1201运动到亮起的第一指示灯1116对应的指示部件的位置。中空腔室1112周边设有感应组件(图中未示出),当感应组件感应到镜身1203靠近某个第一指示部件1131或第二指示部件1132时,与该指示部件对应的第一指示灯1116熄灭,以通知操作者完成了此次训练。
134.壳体1111是透明的,操作者可以直接透过壳体1111观察到中空腔室1112内的情况。壳体1111外表面还设有提醒装置,提醒装置可表现第一指示灯1116的明暗状态。提醒装置是指示灯。操作者通过第一指示灯1116获取训练指示,教师可以通过第二指示灯获取操
作者是否完成了训练,从而使教师可以评价操作者的操作水平。
135.壳体1111还包括底座1117,底座1117设置于中空腔室1112下部,底座1117外侧设有按钮1171,底座1117内还设有控制模块,控制模块与按钮1171、第一指示灯1116、第二指示灯和感应组件连接,用于根据按钮启动或关闭训练装置,并根据感应组件的信号控制第一指示灯1116或第二指示灯的亮暗。
136.支气管软镜操控换向训练装置的使用方法包括:
137.按下按钮1171后,将支气管软镜1200通过插入口1114竖直放入中空腔室1112内,当第二指示部件1132的感应组件感应到镜身1203后,中空腔室1112底面上的数字“1”对应的第一指示灯1116会亮起,当操作者看到壳体1111上的第二指示灯亮起后,训练者应将镜头1201向数字“1”的相应方向进行转向;当镜头1201向正确的方向转向后,该数字“1”相应的感应组件会感应到镜身1203并熄灭其对应的第一指示灯1116,即操作者完成一次训练。完成一次训练后,第二指示部件1132的第一指示灯1116会亮起以提示操作者将支气管软镜1200回到初始状态。操作者需要将镜头1201转回到第二指示部件1132的位置,当第二指示部件1132的感受组件感应到镜身1203后熄灭其对应的第一指示灯1116,中空腔室1112底面上的数字“5”对应的第一指示灯1116会亮起,并重复上述操作步骤,直至完成十二个方向的转向训练。在训练过程中,第一指示灯1116和第二指示灯随机亮起。
138.支气管软镜操控换向训练装置的得分目标包括:重复上述操作步骤,直至完成十二个方向的转向训练。
139.步骤s21:进行支气管软镜操控初级训练模型考试,得到支气管软镜操控初级训练模型考试的得分,并判断所述支气管软镜操控初级训练模型考试的得分是否达到第二预设值。
140.用户学习完支气管软镜操控初级培训课程之后,进行支气管软镜操控初级训练模型考试,得到支气管软镜操控初级训练模型考试的得分,并判断支气管软镜操控初级训练模型考试的得分是否达到第二预设值,其中,当支气管软镜操控初级训练模型考试的得分未达到第二预设值时,继续学习支气管软镜操控初级培训课程,当支气管软镜操控初级训练模型考试的得分达到第二预设值时,开始学习支气管软镜操控中级培训课程。
141.支气管软镜操控初级训练模型,即,支气管软镜操控换向训练装置。
142.第二预设值,即,上述支气管软镜操控换向训练装置的得分目标。
143.步骤s30:提供支气管软镜操控中级培训课程。
144.支气管软镜操控中级培训课程包括:介绍支气管软镜操控目标孔不移动训练箱的使用方法及得分目标。
145.支气管软镜操控目标孔不移动训练箱的具体结构如下所述:
146.如图4和图5所示,该支气管软镜操控目标孔不移动训练箱包括装置本体2221和平行设置于装置本体2221内部的多个隔板2222,其中各隔板2222均可拆卸地设置于装置本体2221的内部的下方,以根据需要设置训练或考核难度。隔板2222并排设置在前侧板2211与后侧板之间且与前/后侧板平行,标示板2220贴合在后侧板上。装置本体2221的前侧板2211上设有一个通孔2210,每个隔板2222上均设置有至少一个通孔2210,沿前侧板2211到后侧板的方向隔板2222上的通孔2210的数量逐渐增多。标示板2220上设置有字母表示层,字母的个数和位置与最靠近后侧板的隔板2222的通孔2210的数量和排列一致。最靠近后侧板的
隔板2222的通孔2210的数量为十六个,相应地,标示板2220上的字母表示层上的字母个数为也为十六个,分别是a-p。
147.装置本体2221为长方体结构,装置本体2221的至少一个侧板可拆卸地设置于装置本体2221上,以方便更换隔板2222。
148.支气管软镜操控目标孔不移动训练箱还包括检测装置和设置在装置本体2221内部的控制模块。检测装置分别设置在每个通孔2210处,用于当支气管软镜1200穿过通孔2210时,检测装置发出检测信号。通过在每个通孔2210处设置检测装置来检测支气管软镜1200的穿过,检测装置检测到支气管软镜1200穿过通孔2210后,将检测信号发送给控制模块,控制模块根据该检测信号就可以确定是否有支气管软镜1200穿过通孔2210。
149.支气管软镜操控目标孔不移动训练箱还包括显示模块2224,其设置在装置本体2221的前侧板2211的上部。显示模块2224用于显示各通孔2210处是否有支气管软镜1200穿过。当检测装置检测到支气管软镜1200穿过某个通孔2210时,该通孔2210处的检测装置将检测信号发送给控制模块,控制模块接收到该检测信号后,控制显示模块2224将与该通孔2210对应的位置标记显示。
150.在显示模块2224的屏幕上,各个通孔2210的初始显示颜色为红色,一旦当支气管软镜1200穿过通孔2210时,控制显示模块2224的屏幕上被支气管软镜1200穿过的通孔2210的颜色变为绿色,而未被支气管软镜1200穿过的通孔2210的颜色不变。
151.支气管软镜操控目标孔不移动训练箱还包括计时模块,用于记录支气管软镜1200穿过各通孔2210的时刻。当控制模块判断为有支气管软镜1200穿过通孔2210时,控制模块向计时模块发送计时信号,计时模块根据计时信号记录支气管软镜1200穿过通孔2210的时间。
152.计时模块还用于将记录的时刻传送至控制模块,控制模块根据接收到的上述时刻计算支气管软镜1200从穿过前侧板2211上的通孔2210至穿过靠近装置本体2221的后侧板的隔板2222上的通孔2210的时间,和/或,计算穿过两个隔板2222的通孔2210的时间。
153.显示模块2224显示每次操作支气管软镜1200的上述用时情况。
154.支气管软镜操控目标孔不移动训练箱还包括用于设定练习模式和考核模式的模式设定模块,该模式设定模块与控制模块连接。
155.如图4所示,装置本体2221的后侧板的上方设置开关按钮2228,该开关按钮2228与控制模块连接。装置本体2221内还设置有电源模块,该电源模块与开关按钮2228连接,开关按钮2228控制电源模块与控制模块之间的通电与断电。在操作者操作支气管软镜操控目标孔不移动训练箱时,通过打开或关闭装置本体2221后侧的开关按钮2228,从而能够控制训练装置的开机与关机。
156.通过检测装置检测支气管软镜1200穿过的通孔2210并在显示模块2224上对应地显示出来,以及通过控制模块计算操作者的用时情况,操作者能够独立完成训练和考核操作,无需其他人员一同进行监督、计时、指令等工作。
157.支气管软镜操控目标孔不移动训练箱的使用方法包括:
158.支气管软镜操控目标孔不移动训练箱可以用于训练目的也可以用于考核目的。在操作者使用该支气管软镜操控目标孔不移动训练箱时,显示模块2224的屏幕上显示练习模式和考核模式,以供操作者选择。当操作者选择练习模式时,操作者首先确定目标,也就是
确定支气管软镜1200要看到标示板2220上的哪个字母。确定好之后,显示模块2224的屏幕分两部分,并列显示所有通孔2210,其中一部分将支气管软镜1200要到达指定字母所需要穿过的通孔2210以不同颜色显示出来,供操作者参考;另一部分实时显示支气管软镜1200所穿过的通孔2210并以不同颜色显示出来,以便观察操作者穿过的是哪个通孔2210以及穿过的通孔2210否正确。
159.当操作者操作支气管软镜1200穿过指定的通孔2210时,显示模块2224的实时显示部分就会改变穿过的通孔2210的颜色,以表示已经穿过了该通孔2210。如果操作者穿过的不是指定通孔2210,则显示模块2224上会显示所穿过的通孔2210,这时操作者发现错误,可以重新进行操作。无需教学人员在旁指导监督,操作者也能够知道如何进行操作以及操作是否正确。
160.例如,在练习模式下,选择指定字母a之后,所有通孔2210的颜色为红色,但是显示模块2224上参考使用的、与到达该字母的通孔2210相对应的显示位置变为绿色;显示模块2224还并列显示支气管软镜1200的实时位置,当检测装置检测到支气管软镜1200穿过指定通孔2210时,该通孔2210相对应的显示位置变为绿色。通过比较这两部分显示的画面,操作者能够容易地观察到操作者的操作是否正确,以及出现错误的位置。另外,当操作者选择考核模式时,显示模块2224的屏幕上显示随机生成的字母的顺序,操作者需要按顺序操作使支气管软镜1200到达指定字母所对应的通孔2210。这时,屏幕上将所有通孔2210显示出来,并且实时显示支气管软镜1200所穿过的通孔2210,也就是随着支气管软镜1200的操作改变与穿过的通孔2210对应地位置的显示颜色。
161.支气管软镜操控目标孔不移动训练箱的得分目标包括:显示模块的屏幕上显示随机生成的字母的顺序,操作者按顺序操作,并在计时模块指定的时间内使支气管软镜1200到达所有指定字母所对应的通孔。
162.步骤s31:进行支气管软镜操控中级训练模型考试,得到支气管软镜操控中级训练模型考试的得分,并判断所述支气管软镜操控中级训练模型考试的得分是否达到第三预设值。
163.用户学习完支气管软镜操控中级培训课程之后,进行支气管软镜操控中级训练模型考试,得到支气管软镜操控中级训练模型考试的得分,并判断支气管软镜操控中级训练模型考试的得分是否达到第三预设值,其中,当支气管软镜操控中级训练模型考试的得分未达到第三预设值时,继续学习支气管软镜操控中级培训课程,当支气管软镜操控中级训练模型考试的得分达到第三预设值时,开始学习支气管软镜操控高级培训课程。
164.支气管软镜操控中级训练模型,即,支气管软镜操控目标孔不移动训练箱。
165.第三预设值,即,上述支气管软镜操控目标孔不移动训练箱的得分目标。
166.步骤s40:提供支气管软镜操控高级培训课程。
167.支气管软镜操控高级培训课程包括:介绍支气管软镜操控目标孔移动智能训练箱的使用方法及得分目标。
168.支气管软镜操控目标孔移动智能训练箱的具体结构如下所述:
169.如图6所示,支气管软镜操控目标孔移动智能训练箱包括:
170.箱体3331,箱体3331为长方体,其侧壁上开设有通孔3313,用于插入支气管软镜1200;
171.安装板组件,设于箱体3331内,安装板组件与通孔3313所在的箱体3331的侧壁平行设置,安装板组件上设有目标孔3325;
172.驱动机构,设于箱体上,用于驱动目标孔3325产生相对于箱体3331的移动。
173.通过将目标孔3325设计为可移动的形式,模拟临床清醒支气管软镜插管时患者的活动状态,从而增强训练难度,帮助训练者快速适应临床的实际状态。
174.如图6、图7所示,安装板组件包括:
175.安装板3321,设于箱体3331内,安装板3321与通孔3313所在的箱体3331的侧壁平行设置,安装板3321上设有让位槽3322,该让位槽3322为条形通槽;
176.滑槽3323,设于安装板3321上;
177.移动板3324,设于滑槽3323内,目标孔3325设于移动板3324上,目标孔3325与让位槽3322的位置相对应,驱动机构与移动板3324相连,驱动机构用于驱动移动板3324沿滑槽3323往复滑动,目标孔3325可在移动板3324的带动下在让位槽3322覆盖的区域内往复移动。
178.如图7所示,驱动机构包括磁铁3332,设于移动板3324上;电磁铁3333,设于箱体3331的内壁上,电磁铁3333与磁铁3332的位置相对应。其中,在移动板3324的两侧均设置磁铁3332与电磁铁3333。通过改变电磁铁3333的磁极,可使电磁铁3333吸引或排斥与其相对应的磁铁3332,从而带动移动板3324产生晃动。通过调节磁力大小,可调整移动板3324的移动速度。通过调节电磁铁3333的磁极变换频率,可调整移动板3324的晃动频率。通过利用电磁铁3333与磁铁3332带动移动板3324晃动。
179.如图7所示,移动板3324与箱体3331之间设有弹性件3334,弹性件3334用于对移动板3324的运动进行缓冲。该弹性件3334为弹簧。通过设置弹性件3334对移动板3324的运动进行缓冲,减小目标孔3325运行的加速度,消除目标孔3325可能出现的运行加速度过大的情况,更好的模拟临床插管时患者的活动状态。
180.如图6所示,箱体3331的内壁上设有多个插块组,每个插块组包括两个沿第一方向(图6中的x方向)间隔设置的插块3314,安装板3321插装于插块组的两个插块3314之间的间隙中。通过插装的方式,方便对安装板3321进行组装和拆卸。
181.安装板组件的数量为多个,当训练者进行支气管软镜1200训练时,需将支气管软镜1200依次穿过各安装板组件上的目标孔3325。
182.相邻两安装板组件上的目标孔3325的运动方向相反,以可增强训练难度。
183.各安装板组件上设有的目标孔3325的数量沿第一方向(图6中的x方向)依次增多。各安装板组件上设有的目标孔3325的数量沿第一方向(图6中的x方向)依次呈整数倍递增关系。将各安装板组件上的目标孔3325的数量沿第一方向(图6中的x方向)依次增多,使训练者在将支气管软镜1200穿过一个目标孔3325后,沿第一方向(图6中的x方向)设置的下一个安装板组件上有多个目标孔3325可供下一次插管选择,考核训练者是否能够选取正确的插管路径,即预先设定一个标准的插管路径,考核训练者是否能够正确的将支气管软镜1200穿过该标准路径上的每一个目标孔3325,以增强训练难度。
184.安装板组件的数量为4个,4个安装板组件沿第一方向(图6中的x方向)依次为第一安装板组件3326、第二安装板组件3327、第三安装板组件3328和第四安装板组件3329,第一安装板组件3326上的目标孔3325的数量为1个,第二安装板组件3327上的目标孔3325的数
量为2个,第三安装板组件3328上的目标孔3325的数量为4个,第四安装板组件3329上的目标孔3325的数量为16个。
185.第二安装板组件3327与第三安装板组件3328之间设有第一隔板3309,第三安装板组件3328与第四安装板组件3329之间设有第二隔板3305,第四安装板组件3329与箱体3331侧壁之间设有第三隔板3306。第一隔板3309将第二安装板组件3327上的目标孔3325和第三安装板组件3328上的目标孔3325平均分隔至2个区域内,第二隔板3305将第三安装板组件3328上的目标孔3325和第四安装板组件3329上的目标孔3325平均分隔至4个区域内,第三隔板3306将第四安装板组件3329上的目标孔3325平均分隔至16个区域内。设置第一隔板3309、第二隔板3305和第三隔板3306,将目标孔3325分隔于不同区域中,防止支气管软镜1200穿入与标准插管路径的位置偏差过大的目标孔3325中,导致支气管软镜1200因过度扭曲而受损。
186.训练时,训练者将支气管软镜1200穿过第一安装板组件3326上的目标孔3325后,训练者在镜下能观察到第二安装板组件3327上设置的两个目标孔3325,训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。在穿过第二安装板组件3327后,训练者在镜下能观察到第三安装板组件3328上设置的两个目标孔3325,训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。在穿过第三安装板组件3328后,训练者在镜下能观察到第四安装板组件3329上设置的四个目标孔3325,训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。
187.支气管软镜操控目标孔移动智能训练箱,锻炼训练者对支气管软镜1200前进、后退、旋转、屈曲的复合手法的使用,当训练者可以操作支气管软镜1200自由进入第四安装板组件3329所具有的目标孔3325时,认为操作者已经基本掌握支气管软镜1200的操作技术。
188.支气管软镜操控目标孔移动智能训练箱,还包括16个标示板,标示板的示意图可参照图5。标示板设于与第四安装板组件3329相邻且平行的箱体3331的内壁上,各标示板标号的位置分别与第四安装板组件3329上的各目标孔3325的位置相对应。当训练者在完成插管训练后,在镜下能够看到与最后穿过的目标孔3325所对应的标示板,通过观看标示板上的标记,即可知道自己所完成的插管路径是否正确。在考核时,规定训练者进入某一个标示板所对应的目标孔3325,若最终训练者进入正确的目标孔3325后,可以在支气管软镜1200的镜下看到该目标孔3325所对应的标示板,若最终看到的标示板上的标记与要求进入目标孔3325的标记相符,认为训练者能够按照要求操作支气管软镜1200。
189.支气管软镜操控目标孔移动智能训练箱的使用方法包括:
190.启动驱动机构,驱动机构带动移动板3324产生晃动,随后训练者将支气管软镜1200先后穿入通孔3313与第一安装板组件3326上的目标孔3325中。
191.在穿过第一安装板组件3326后,训练者在镜下能观察到第二安装板组件3327上设置的两个目标孔3325,训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。
192.在穿过第二安装板组件3327后,训练者在镜下能观察到第三安装板组件3328上设置的两个目标孔3325(第三安装板组件3328上设有四个目标孔3325,由于被第一隔板3309平均分隔至两个区域,因此穿过第二安装板组件3327上的某一个穿接孔后,只能看到第三
安装板组件3328上的两个目标孔3325),训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。
193.在穿过第三安装板组件3328后,训练者在镜下能观察到第四安装板组件3329上设置的四个目标孔3325(第四安装板组件3329上设有16个目标孔3325,由于被第二隔板3305平均分隔至四个区域,因此穿过第三安装板组件3328上的某一个穿接孔后,只能看到第四安装板组件3329上的四个目标孔3325),训练者根据预先设置的标准插管路径,选择其中一个目标孔3325,并将支气管软镜1200插入该目标孔3325中。
194.在穿过第四安装板组件3329后,训练者在镜下能观察到与最后穿过的目标孔3325所对应的标示板(标示板共有16个,由于被第三隔板3306平均分隔至16个区域,即每个区域内仅有一个标示板,因此穿过第四安装板组件3329中的某一个目标孔3325后,仅能看到与该目标孔3325所对应的标示板),通过观看标示板上的标记,即可知道自己所完成的插管路径是否正确。
195.支气管软镜操控目标孔移动智能训练箱的得分目标包括:训练者操作支气管软镜依次穿过十六个目标孔,看到目标孔所对应的标示板。
196.步骤s41:进行支气管软镜操控高级训练模型考试,得到支气管软镜操控高级训练模型考试的得分,并判断所述支气管软镜操控高级训练模型考试的得分是否达到第四预设值。
197.用户学习支气管软镜操控高级培训课程之后,进行支气管软镜操控高级训练模型考试,得到支气管软镜操控高级训练模型考试的得分,并判断支气管软镜操控高级训练模型考试的得分是否达到第四预设值,其中,当支气管软镜操控高级训练模型考试的得分未达到第四预设值时,继续学习支气管软镜操控高级培训课程,当支气管软镜操控高级训练模型考试的得分达到第四预设值时,开始学习正常气道解剖患者全麻支气管软镜引导插管的理论课程。
198.支气管软镜操控高级训练模型,即,支气管软镜操控目标孔移动智能训练箱。
199.第四预设值,即,上述支气管软镜操控目标孔移动智能训练箱的得分目标。
200.步骤s50:提供正常气道解剖患者全麻支气管软镜引导插管的理论课程。
201.正常气道解剖患者全麻支气管软镜引导插管的理论课程包括:介绍支气管软镜实景模拟人体无肿物训练装置的使用方法及得分目标。
202.支气管软镜实景模拟人体无肿物训练装置的具体结构如下所述:
203.如图8-图10所示,支气管软镜实景模拟人体无肿物训练装置,用于气管插管工具(例如:支气管软镜、硬质管芯、喉镜及喉罩等)的插管技能训练,包括:底座4001;替换模组4002,可拆卸安装于底座4001上,替换模组4002内设有第一人体组织模型4021。
204.替换模组4002与底座4001可拆卸连接,实现在底座4001上安装不同种类的人体组织模型,从而满足学员了解各种情况下的解剖变异结构的需求。
205.底座4001上还设有头部模型4003,头部模型内部设有内腔,第一人体组织模型4021内部具有第一腔体,内腔与第一腔体可用于模拟人体气道。当替换模组4002安装于底座4001上时,内腔与第一腔体相连通。设置头部模型4003,使气管插管工具从内腔中进入模型,进一步伸入到第一腔体中,以增强临床拟真效果。
206.替换模组4002的数量为多个,各替换模组4002中包含不同的人体组织模型,通过
对不同的替换模组4002进行组合,模拟更多的人体解剖结构,增强训练的多样性。
207.如图10所示,内腔包括鼻腔4031、口腔4032、咽部腔体4033和喉部腔体4034,第一人体组织模型4021包括第一模拟气管4211和第一模拟食管4212,其中,第一模拟气管4211和第一模拟食管4212的管道腔即为第一腔体,上述各部分的位置和比例关系均参照人体设置。
208.还包括控制系统(可以为单片机或plc系统)。
209.气管插管工具伸入人体的一端设有传感器,传感器与控制系统电连接,传感器为压力传感器。控制系统还电连接有报警装置,当压力传感器检测到的压力值大于预设压力值(该预设压力值可以设置为能够使患者产生呛咳的压力值)时,压力传感器向控制系统发出触发信号,控制系统在接收到触发信号后,控制报警装置进行报警。通过在气管插管工具伸入人体的一端设置压力传感器,当气管插管工具碰触到内腔或第一腔体腔壁时,压力传感器检测到的压力值增大。当压力值大于预设压力值时,报警装置产生报警,从而对训练者进行提示,锻炼训练者在插管过程中避免将气管插管工具与气道腔壁接触,增强训练难度。
210.支气管软镜实景模拟人体无肿物训练装置的使用方法包括:
211.首先练习者挑选想要练习的替换模组4002安装在底座上,然后练习者持支气管软镜1200从鼻腔4031或口腔4032进入替换模型中的第一模拟气管4211,看到第一模拟气管4211即完成了气管插管;当支气管软镜1200碰触到内腔或第一腔体腔壁时,压力传感器检测到的压力值增大;当压力值大于预设压力值时,报警装置产生报警,从而对训练者进行提示,锻炼训练者在插管过程中避免将气管插管工具与气道腔壁接触;
212.支气管软镜实景模拟人体无肿物训练装置的得分目标包括:练习者持支气管软镜从鼻腔或口腔进入替换模型中的第一模拟气管,在报警装置不产生报警的情况下,看到第一模拟气管。
213.步骤s51:进行实景初级训练模型考试,得到实景初级训练模型考试的得分,并判断所述实景初级训练模型考试的得分是否达到第五预设值。
214.用户学习正常气道解剖患者全麻支气管软镜引导插管的理论课程之后,进行实景初级训练模型考试,得到实景初级训练模型考试的得分,并判断实景初级训练模型考试的得分是否达到第五预设值,其中,当实景初级训练模型考试的得分未达到第五预设值时,继续学习正常气道解剖患者全麻支气管软镜引导插管的理论课程,当实景初级训练模型考试的得分达到第五预设值时,开始学习异常气道解剖患者清醒支气管软镜引导插管的理论课程;
215.实景初级训练模型,即,支气管软镜实景模拟人体无肿物训练装置。
216.第五预设值,即,上述支气管软镜实景模拟人体无肿物训练装置的得分目标。
217.步骤s60:提供异常气道解剖患者清醒支气管软镜引导插管的理论课程。
218.异常气道解剖患者清醒支气管软镜引导插管的理论课程包括:介绍支气管软镜实景模拟人体有肿物、分泌液训练装置的使用方法及得分目标。
219.支气管软镜实景模拟人体有肿物、分泌液训练装置的具体结构如下所述:
220.支气管软镜实景模拟人体有肿物、分泌液训练装置,是在上述支气管软镜实景模拟人体无肿物训练装置的结构基础上增加了部分部件的训练装置。
221.如图9和图10,支气管软镜实景模拟人体有肿物、分泌液训练装置的第一腔体的内
壁上还设有模拟肿物4213,该模拟肿物4213设于从软腭至环状软骨的气道径路上。该设计为训练者提供声门周围肿物软镜模拟操作训练。通过设置模拟肿物4213,模拟临床实际中由于呼吸道上长有肿物而对气管插管产生的影响,增强训练难度。
222.底座4001上还设有播音器,播音器用于播放干扰音,该干扰音为报警声、周围环境催促声或呛咳声等。通过设置播音器,模拟真实的临床环境,为训练者提供干扰因素,从而增强练习者的心理耐受能力。
223.还包括遥控器4005,遥控器4005用于远程控制播音器开关以及调节干扰音大小。通过设置遥控器,使旁观者根据实际情况对干扰音进行控制,从而使干扰因素模拟更有针对性。此外,遥控器4005上还设有计时器,用于为训练者计时。
224.如图10所示,第一腔体内壁上还设有喷液腔体4007,喷液腔体4007远离第一腔体的一端连接有连接管4072,连接管4072的另一端连接有储液盒4071,储液盒4071用于盛装液体,连接管上设有阀门4073,该阀门4073为电控阀门。当阀门4073打开时,储液盒4071中的液体通过连接管4072及喷液腔体4007流入到第一腔体内,以模拟临床实际中由于呼吸道出血或产生分泌物而污染支气管软镜或其他气管插管工具的视野,增强训练难度,帮助训练者适应临床的实际状态。喷液腔体4007贯穿模拟肿物4213,以模拟临床实际中肿物流血的效果。
225.如图9和图10所示,咽部腔体4033和喉部腔体4034的内壁上设有气囊4006,气囊4006连接有气管4061,头部模型4003上开设有让位孔4035,气管4061从让位孔4035中穿出至头部模型4003外部,气管4061位于头部模型4003外部的一端连接有气泵4063,用于为气囊4006供气,气管4061上设有换向阀4062,用于控制气囊4006的进气与排气。当换向阀4062为进气状态时,气泵4063向气囊4006中充气,气囊4006鼓起,咽部腔体4033或喉部腔体4034的横截面面积减小。当换向阀4062为排气状态时,气囊4006由于其内部气压大于外部气压,会从换向阀4062中排出一部分气体,导致咽部腔体4033或喉部腔体4034的横截面面积减增大。在咽部腔体4033或喉部腔体4034的腔壁上开设槽体4036,将气囊4006嵌入槽体4036中。通过对气囊4006进行充气或排气,使咽部腔体4033或喉部腔体4034的横截面面积发生改变,模拟临床实际中由于患者咽部或喉部收缩而对气管插管产生的影响,增强训练难度。
226.还包括控制系统(可以为单片机或plc系统),控制系统与遥控器4005、换向阀4062、气泵4063、阀门4073和振动电机4008电连接,用于控制上述各部件运行。
227.如图9所示,替换模组4002上设有振动电机4008,替换模组4002与底座4001之间设有弹性件4081,该弹性件4081为弹簧,弹性件4081对替换模组4002提供柔性支撑,振动电机4008用于带动替换模组4002上下振动。弹簧的安装方式为:替换模组4002的两侧分别固定连接有两个安装板4082,各安装板4082的下方固定连接有第一安装管4083,底座4001上固定连接有四个第二安装管4084,各第二安装管4084与第一安装管4083的位置相对应。弹簧的数量为四个,各弹簧的两端分别套装于各第一安装管4083和各第二安装管4084上。振动电机的数量为两个,分置于替换模组4002两侧,同时使用两个振动电机,消除单个振动电机对替换模组4002产生的扭矩。
228.当启动振动电机4008时,替换模组4002在振动电机4008的带动下上下振动。通过使替换模组4002上下振动,模拟临床实际中患者咳嗽时呼吸道的振动状态,增强训练难度,帮助训练者适应临床的实际状态。
229.支气管软镜实景模拟人体有肿物、分泌液训练装置的使用方法包括:
230.进行困难气道软镜模拟操作训练或声门周围肿物软镜模拟操作训练时,首先,练习者挑选想要练习的替换模组4002安装在底座4001上,然后练习者持软镜从鼻腔4031或口腔4032进入替换模组4002中的第一模拟气管4211,完成气管插管。其间,由旁观者使用遥控器4005为练习者计时、打开干扰音、开启振动电机4008带动替换模组4002振动、开启阀门4073向第一腔体内喷射液体、或开启气泵4063和换向阀4062使气囊4006充气或排气,监测报警装置是否因支气管软镜1200与内腔或第一腔体碰触而产生报警,从而增强训练难度。使用不同的替换模组4002,模拟多种困难气道或声门周围肿物的解剖结构,以及模拟在临床实际中患者咳嗽振动、呼吸道收缩、出血污染视野、支气管软镜1200与气道产生碰触等情况,使练习者熟悉不同的困难气道或声门周围肿物的解剖结构。
231.支气管软镜实景模拟人体有肿物、分泌液训练装置的得分目标包括:在有计时限制、干扰音、替换模组振动、第一腔体的内壁上设有模拟肿物、第一腔体内喷射液体模拟分泌液的条件下,练习者持支气管软镜1200从鼻腔或口腔进入替换模型中的第一模拟气管,在报警装置不产生报警的情况下,看到第一模拟气管。
232.步骤s61:进行实景高级训练模型考试,得到实景高级训练模型考试的得分,并判断所述实景高级训练模型考试的得分是否达到第六预设值。
233.用户学习异常气道解剖患者清醒支气管软镜引导插管的理论课程之后,进行实景高级训练模型考试,得到实景高级训练模型考试的得分,并判断实景高级训练模型考试的得分是否达到第六预设值,其中,当实景高级训练模型考试的得分未达到第六预设值时,继续学习异常气道解剖患者清醒支气管软镜引导插管的理论课程,当实景高级训练模型考试的得分达到第六预设值时,通过支气管软镜培训考核。
234.实景高级训练模型,即,支气管软镜实景模拟人体有肿物、分泌液训练装置。
235.第六预设值,即,上述支气管软镜实景模拟人体有肿物、分泌液训练装置。
236.该实景高级训练模型包括声音播放模块、振动模块、血流及分泌液模拟模块,以真实模拟用户在对病人使用支气管软镜的场景和可能出现的紧急情况,从而在提升用户操作支气管软镜手法的同时,有效提高了用户的心理耐受能力。
237.步骤s70:通过支气管软镜培训考核。
238.完成上述步骤s10-步骤s61,即代表用户通过了整个支气管软镜培训考核,已熟练掌握支气管软镜的使用及操作方法。在用户通过支气管软镜培训考核之后,用户上传真实案例的支气管软镜操作视频,并根据真实案例的支气管软镜操作视频的得分,提供进阶提升课程,实现了在无导师指导下,用户可以了解到自身在操作支气管软镜过程中的不足,观看进阶提升课程,更进一步提高用户操作支气管软镜的熟识度和精准度。这里,进阶提升课程是基于用户在操作支气管软镜过程中的不足提供的课程,进阶提升课程包括非技术层面的内容,具体为医护患的沟通技巧、操作环境、心理状态、相关器械、局麻和全麻的操作流程等。
239.在提供支气管软镜理论培训课程之前,包括:输入用户确认信息,提供对用户关于支气管软镜熟识度进行调查评估的试题;在用户完成调查评估后,基于调查评估的结果,提供支气管软镜理论培训课程,这里,支气管软镜理论培训课程是与调查评估结果相匹配的。
240.用户在观看支气管软镜理论培训课程之后,如需再次观看,可选择返回提供支气
管软镜理论培训课程,如无需再次观看,用户可输入确认信息,进行支气管软镜操控初级培训课程的学习,后续根据支气管软镜操控初级培训课程的提示在支气管软镜操控换向训练装置上进行操作训练,该操作训练过程可以被保存。
241.本发明实施例还提供了一种电子设备,包括:存储器,用于存储由电子设备的一个或多个处理器执行的指令;处理器,当处理器执行存储器中的指令时,可使得电子设备执行支气管软镜训练方法。这里,电子设备可以实现为台式计算机设备、笔记本式计算机设备、平板型计算设备、移动终端、网络服务器等。
242.电子设备可以包括耦合到控制器中枢的一个或多个处理器。处理器执行控制一般类型的数据处理操作的指令。在一实施例中,控制器中枢包括,但不局限于,图形存储器控制器中枢(gmch,graphics&memory controller hub)和输入/输出中枢(ioh,input output hub),其中gmch包括存储器和图形控制器并与ioh耦合。电子设备还可包括耦合到控制器中枢的协处理器和存储器。或者,存储器和gmch中的一个或两者可以被集成在处理器内,存储器和协处理器直接耦合到处理器以及控制器中枢,控制器中枢与ioh处于单个芯片中。在一个实施例中,协处理器是专用处理器,诸如例如高吞吐量mic(many integrated core,集成众核)处理器、网络或通信处理器、压缩引擎、图形处理器、gpgpu(general-purpose computing on graphics processing units,图形处理单元上的通用计算)、或嵌入式处理器等等。电子设备可以进一步包括输入/输出(i/o,input/output)设备。
243.本发明实施例还提供了一种存储介质,存储介质上存储有可在处理器上运行的计算机程序,计算机程序被处理器执行时可以实现以上任一种支气管软镜训练方法。存储介质可以包括计算机可读记录/存储介质,如随机存取存储器(ram)、只读存储器(rom)、闪存存储器、光盘、磁盘、固态盘,等等。根据一个或多个实施例,控制器由编程为用于执行本文所描述的一个或多个操作和/或功能的微处理器来执行。根据一个或多个实施例,控制器整个或部分地由专门配置的硬件来执行,例如,由一个或多个专用集成或asic(s)来执行。
244.虽然通过参照本发明的某些优选实施方式,已经对本发明进行了图示和描述,但本领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。本领域技术人员可以在形式上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本发明的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1