基于卷积神经网络的雷达目标识别方法、模型训练方法
1.本公开涉及雷达信号处理技术,尤其涉及一种基于卷积神经网络的雷达目标识别方法、模型训练方法。
背景技术:
2.雷达目标识别是雷达信号处理领域的一个重要问题。雷达目标识别,是利用雷达和计算机对遥远目标进行辨认的技术,通过对雷达回波中的幅度、相位、频谱和极化等目标特征信息的分析,在数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。
3.现有技术中,传统的目标识别方法依赖于人工提取目标特征,主要包括:基于雷达散射截面积(radar cross section,rcs)的目标识别、基于一维距离像的目标识别、基于微多普勒效应的目标识别等。通过人工提取rcs大小、起伏特性、径向尺寸、散射点个数、中心距、微多普勒等特征,应用支持向量机(support vector machine,svm)、分类树、k近邻(k-nearest neighbor,knn)等分类方法对目标进行分类识别。
4.但是,上述方法需要耗费大量的人工工作;且在雷达回波中包含的噪声和杂波多的复杂背景下,目标识别效果不尽人意。
技术实现要素:
5.本公开提供了一种基于卷积神经网络的雷达目标识别方法、模型训练方法,以解决现有技术中需要耗费大量的人工工作;且在雷达回波中包含的噪声和杂波多的复杂背景下,目标识别效果不尽人意的问题。
6.根据本公开第一方面,提供了一种模型训练方法,包括:
7.获取训练数据集;其中,所述训练数据集中包括多组训练数据,所述训练数据中包括雷达回波数据、所述雷达回波数据中包括的目标对象的特征图以及所述目标对象的标注类别;
8.将所述目标对象的特征图输入至预设模型,得到所述目标对象的预测类别;
9.根据所述目标对象的标注类别和预测类别,优化所述预设模型中的参数,得到雷达目标识别模型。
10.在一种可实现方式中,所述获取训练数据集,包括:
11.获取雷达回波数据,并对所述雷达回波数据进行预处理得到原始特征图;
12.根据所述原始特征图确定所述雷达回波数据中包括的目标对象;
13.根据所述雷达回波数据确定所述目标对象的位置信息,并根据所述目标对象的位置信息,确定所述目标对象的标注类别;
14.在所述原始特征图中确定所述目标对象的特征图。
15.在一种可实现方式中,所述原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;
16.所述对所述雷达回波数据进行预处理得到原始特征图,包括:
17.对所述雷达回波数据进行脉冲压缩,得到所述距离-脉冲特征图;
18.对所述雷达回波数据进行动目标显示,得到所述距离-方位特征图;
19.对所述雷达回波数据进行动目标检测,得到所述距离-多普勒特征图。
20.在一种可实现方式中,所述原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;
21.所述在所述原始特征图中确定所述目标对象的特征图,包括:
22.根据所述目标对象在所述雷达回波数据的所述位置信息,在所述距离-脉冲特征图、所述距离-方位特征图、所述距离-多普勒特征图中分别确定与所述目标对象对应的子区域;所述子区域中包括所述目标对象;
23.融合所述目标对象的各所述子区域,得到所述目标对象的特征图。
24.在一种可实现方式中,所述目标对象的各子区域的尺寸相同;
25.融合所述目标对象的各所述子区域,得到所述目标对象的特征图,包括:
26.将各所述子区域内相同位置的特征图数据进行叠加,得到所述目标对象的特征图。
27.在一种可实现方式中,所述雷达目标识别模型中不包括池化层。
28.在一种可实现方式中,所述雷达回波数据包括利用相干脉冲雷达对海观测和对地观测的回波数据。
29.根据本公开第二方面,提供了一种雷达目标识别方法,包括:
30.获取雷达回波数据,并对所述雷达回波数据进行预处理得到原始特征图;
31.根据所述原始特征图确定所述雷达回波数据中包括的目标对象,并根据所述原始特征图确定所述目标对象的特征图;
32.将所述目标对象的特征图输入至预设的雷达目标识别模型,得到与所述目标对象对应的类别;
33.其中,所述雷达目标识别模型是使用训练数据集训练得到的,所述训练数据集中包括多组训练数据,所述训练数据中包括用于训练模型的雷达回波样本数据、所述雷达回波样本数据中包括的目标对象的特征图以及该目标对象的标注类别。
34.根据本公开第三方面,提供了一种模型训练装置,包括:
35.获取单元,用于获取训练数据集;其中,所述训练数据集中包括多组训练数据,所述训练数据中包括雷达回波数据、所述雷达回波数据中包括的目标对象的特征图以及所述目标对象的标注类别;
36.训练单元,用于将所述目标对象的特征图输入至预设模型,得到所述目标对象的预测类别;
37.训练单元,还用于根据所述目标对象的标注类别和预测类别,优化所述预设模型中的参数,得到雷达目标识别模型。
38.根据本公开第四方面,提供了一种雷达目标识别装置,包括:
39.获取单元,用于获取雷达回波数据,并对所述雷达回波数据进行预处理得到原始特征图;
40.处理单元,用于根据所述原始特征图确定所述雷达回波数据中包括的目标对象,
并根据所述原始特征图确定所述目标对象的特征图;
41.识别单元,用于将所述目标对象的特征图输入至预设的雷达目标识别模型,得到与所述目标对象对应的类别;
42.其中,所述雷达目标识别模型是使用训练数据集训练得到的,所述训练数据集中包括多组训练数据,所述训练数据中包括用于训练模型的雷达回波样本数据、所述雷达回波样本数据中包括的目标对象的特征图以及该目标对象的标注类别。
43.根据本公开第五方面,提供了一种电子设备,包括存储器和处理器;其中,
44.所述存储器,用于存储计算机程序;
45.所述处理器,用于读取所述存储器存储的计算机程序,并根据所述存储器中的计算机程序执行如第一方面、第二方面所述的方法。
46.根据本公开第六方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,当处理器执行所述计算机执行指令时,实现如第一方面、第二方面所述的方法。
47.根据本公开第七方面,提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时,实现如第一方面、第二方面所述的方法。
48.本公开提供的基于卷积神经网络的雷达目标识别方法、模型训练方法,包括:获取训练数据集;其中,训练数据集中包括多组训练数据,训练数据中包括雷达回波数据、雷达回波数据中包括的目标对象的特征图以及目标对象的标注类别;将目标对象的特征图输入至预设模型,得到目标对象的预测类别;根据目标对象的标注类别和预测类别,优化预设模型中的参数,得到雷达目标识别模型。本方案提供的基于卷积神经网络的雷达目标识别方法、模型训练方法中,基于卷积神经网络对雷达回波数据进行目标识别,无需耗费大量的人工工作,且在雷达回波数据中包含的噪声和杂波多的复杂背景下,也有较好的目标识别效果。
附图说明
49.附图用于更好地理解本方案,不构成对本公开的限定。其中:
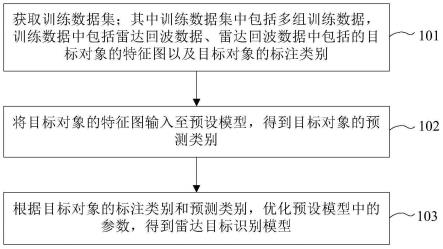
50.图1为本公开一示例性实施例示出的模型训练方法的流程示意图;
51.图2为本公开另一示例性实施例示出的模型训练方法的流程示意图;
52.图3为本公开一示例性实施例示出的目标对象的距离-脉冲特征图的示意图;
53.图4为本公开一示例性实施例示出的目标对象的距离-方位特征图的示意图;
54.图5为本公开一示例性实施例示出的目标对象的距离-多普勒特征图的示意图;
55.图6为本公开一示例性实施例示出的目标对象的特征图的示意图;
56.图7为本公开一示例性实施例示出的雷达目标识别方法的流程示意图;
57.图8为本公开一示例性实施例示出的模型训练装置的结构图;
58.图9为本公开一示例性实施例示出的雷达目标识别装置的结构图;
59.图10为本公开一示例性实施例示出的电子设备的结构图。
具体实施方式
60.雷达目标识别是雷达信号处理领域的一个重要问题。雷达目标识别,是利用雷达
和计算机对遥远目标进行辨认的技术,通过对雷达回波中的幅度、相位、频谱和极化等目标特征信息的分析,在数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。现代雷达不但是对遥远目标进行探测和定位的工具,而且能够测量与目标形体和表面物理特性有关的参数,进而对目标分类和识别。现有技术中,传统的目标识别方法依赖于人工提取目标特征,主要包括:基于雷达散射截面积(radar cross section,rcs)的目标识别、基于一维距离像的目标识别、基于微多普勒效应的目标识别等。其中,rcs是目标在雷达接收方向上反射雷达信号能力的度量,一个目标的rcs等于单位立体角目标在雷达接收天线方向上反射的功率(每单独立体角)与入射到目标处的功率密度(每平方米)之比。通过人工提取rcs大小、起伏特性、径向尺寸、散射点个数、中心距、微多普勒等特征,应用支持向量机(support vector machine,svm)、分类树、k近邻(k-nearest neighbor,knn)等分类方法对目标进行分类识别。
61.但是,上述方法需要耗费大量的人工工作;且在雷达回波中包含的噪声和杂波多的复杂背景下,目标识别效果不尽人意。
62.为了解决上述技术问题,本公开提供的方案中,基于卷积神经网络对雷达回波数据进行目标识别,无需耗费大量的人工工作,且在雷达回波数据中包含的噪声和杂波多的复杂背景下,也有较好的目标识别效果。
63.图1为本公开一示例性实施例示出的模型训练方法的流程示意图。
64.如图1所示,本实施例提供的模型训练方法包括:
65.步骤101,获取训练数据集;其中,训练数据集中包括多组训练数据,训练数据中包括雷达回波数据、雷达回波数据中包括的目标对象的特征图以及目标对象的标注类别。
66.其中,本公开提供的方法可以由具备计算能力的电子设备来执行,比如可以是计算机等设备。该电子设备能够获取训练数据集。
67.其中,训练数据集中可以包括采集设备采集并发送给电子设备的雷达回波数据,以及电子设备根据接收的雷达回波数据得到的目标对象的特征图、以及目标对象的标注类别。
68.其中,采集设备指雷达回波数据采集设备,比如可以为相干脉冲雷达。其中,脉冲雷达是相对于连续波雷达而言的,指的是通过发送短脉冲来进行探测的雷达。相干又称为相参,指的是雷达发射的脉冲之间存在确定的相位关系,可以进行多普勒处理。相干脉冲雷达是能够发射相位确定的脉冲来进行探测的雷达,目前多数预警雷达均为相干脉冲雷达。
69.具体的,从雷达回波数据中识别出的物体可以称之为目标对象。
70.其中,原始的雷达回波数据可以为相干脉冲雷达对海观测和对地观测的回波数据。其目标可以分别为船舶、车辆、拖球。
71.具体的,目标对象的特征图可以为以目标对象的位置范围,对雷达回波数据进行数据处理,得到的特征图。其中,可以根据雷达回波数据中包括的位置信息得到目标对象的位置信息。
72.其中,目标对象的标注类别比如可以包括车辆、船舶,以及拖球。具体的,可以查询雷达探测范围内的地理信息,将陆地范围内的点迹标记为类别1:车辆;将海面上的点迹标记为类别2:船舶;将合作实验目标标记为类别3:拖球。此处,合作实验目标的地理标签由定
位装置取得。
73.具体的,可以将拖球拖在船舶上,并在船舶或者拖球上放置定位装置,该定位装置可以定位拖球的位置。若目标对象的位置信息与定位装置定位的位置信息匹配,则确定该目标对象为拖球。
74.其中,定位装置比如可以为全球定位系统(global positioning system,gps)。
75.其中,在雷达回波信号中检测出来的目标,按照其方位、距离坐标显示在雷达显示器上的点,称为点迹。步骤102,将目标对象的特征图输入至预设模型,得到目标对象的预测类别。
76.其中,预测类别可以包括车辆、船以及拖球。具体的,预测类别中包括的类别与标注类别中包括的类别相同。
77.其中,预设模型为预先设置的网络模型。该网络模型为基于卷积神经网络设置的。
78.具体的,雷达回波中包含的噪声和杂波,通过基于卷积神经网络的网络模型的处理后,可以减少噪声和杂波。
79.步骤103,根据目标对象的标注类别和预测类别,优化预设模型中的参数,得到雷达目标识别模型。
80.具体的,可以将目标对象的标注类别作为目标对象的预测类别的标签,对预设模型进行训练,优化预设模型中的参数。使得预测类别与标注类别越来越接近。当达到预设条件,比如预测类别与标注类别的相同度达到百分之九十时,停止训练,得到雷达目标识别模型。
81.具体的,雷达目标识别模型可以输出采集的雷达回波数据中包括的目标对象的类别。
82.本公开提供的基于卷积神经网络的雷达目标识别方法、模型训练方法,包括:获取训练数据集;其中,训练数据集中包括多组训练数据,训练数据中包括雷达回波数据、雷达回波数据中包括的目标对象的特征图以及目标对象的标注类别;将目标对象的特征图输入至预设模型,得到目标对象的预测类别;根据目标对象的标注类别和预测类别,优化预设模型中的参数,得到雷达目标识别模型。本方案提供的基于卷积神经网络的雷达目标识别方法、模型训练方法中,基于卷积神经网络对雷达回波数据进行目标识别,无需耗费大量的人工工作,且在雷达回波数据中包含的噪声和杂波多的复杂背景下,也有较好的目标识别效果。
83.图2为本公开另一示例性实施例示出的模型训练方法的流程示意图。
84.如图2所示,本实施例提供的模型训练方法包括:
85.步骤201,获取雷达回波数据,并对雷达回波数据进行预处理得到原始特征图。
86.具体的,电子设备可以获取采集设备采集的雷达回波数据,并对获取的雷达回波数据进行预处理得到原始特征图。
87.可选的,雷达回波数据包括利用相干脉冲雷达对海观测和对地观测的回波数据。
88.其中,采集设备可以为相干脉冲雷达。该相干脉冲雷达可以对海观测、对地观测,得到雷达回波数据,并将采集的雷达回波数据发送给电子设备。该相干脉冲雷达的目标可以分别为车辆、船舶、拖球。电子设备可以获取相干脉冲雷达发送的雷达回波数据。
89.可选的,原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特
征图;
90.具体的,原始特征图可以包括多个特征图,如距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图。
91.对雷达回波数据进行脉冲压缩,得到距离-脉冲特征图;对雷达回波数据进行动目标显示,得到距离-方位特征图;
92.对雷达回波数据进行动目标检测,得到距离-多普勒特征图。
93.步骤202,根据原始特征图确定雷达回波数据中包括的目标对象。
94.具体的,可以利用恒虚警检测方法,在原始特征图中确定雷达回波数据中包括的目标对象。
95.具体的,对于相干脉冲雷达的回波信号,我们一般采取脉冲压缩、动目标显示、动目标检测、恒虚警检测这四个步骤来进行处理。其中,脉冲压缩、动目标显示、动目标检测得到的三张特征图分别为距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图。这三个步骤实质都是一种滤波器,是为了抑制杂波。恒虚警检测得到的是点迹信息。
96.步骤203,根据雷达回波数据确定目标对象的位置信息,并根据目标对象的位置信息,确定目标对象的标注类别。
97.具体的,可以根据雷达回波数据中包括的方位、距离信息确定目标对象的位置信息。其中,目标对象的位置信息指经纬度信息。
98.其中,目标对象的标注类别比如可以包括车辆、船舶,以及拖球。具体的,可以查询雷达探测范围内的地理信息,将陆地范围内的点迹标记为类别1:车辆;将海面上的点迹标记为类别2:船舶;将合作实验目标标记为类别3:拖球。此处,合作实验目标的地理标签由定位装置取得。
99.具体的,可以将拖球拖在船舶上,并在船舶或者拖球上放置定位装置,该定位装置可以定位拖球的位置。若目标对象的位置信息与定位装置定位的位置信息匹配,则确定该目标对象为拖球。
100.步骤204,在原始特征图中确定目标对象的特征图。
101.具体的,可以在原始特征图中截取包括目标对象在内的特征图。
102.可选的,原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;
103.根据目标对象在雷达回波数据的位置信息,在距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图中分别确定与目标对象对应的子区域;子区域中包括目标对象;
104.具体的,可以将雷达的扫描范围划分成m*n的一个网格。其中,m是距离单元个数,n是波位个数。每个距离单元,比如可以设置为1.5米;每个波位比如可以设置为0.5度。
105.具体的,可以根据目标对象在雷达回波数据中的距离展宽和脉冲数,将目标所在位置的前后10个距离单元和左右3个波位划分为目标范围,其大小为21*6。
106.其中,在距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图中分别确定与目标对象对应的子区域,各子区域可以分别称为目标对象的距离-脉冲特征图、目标对象的距离-方位特征图、目标对象的距离-多普勒特征图。
107.如图3所示,为目标对象的距离-脉冲特征图,其中,坐标0-1表示灰度值;坐标0-20表示距离单元;坐标1-6表示波位。
108.如图4所示,为目标对象的距离-方位特征图,其中,坐标0-1表示灰度值;坐标0-20表示距离单元;坐标1-6表示波位。
109.如图5所示,为目标对象的距离-多普勒特征图,其中,坐标0-1表示灰度值;坐标0-20表示距离单元;坐标1-6表示波位。
110.融合目标对象的各子区域,得到目标对象的特征图。
111.具体的,可以融合目标对象的多个特征图,得到目标对象的特征图。
112.可选的,目标对象的各子区域的尺寸相同;将各子区域内相同位置的特征图数据进行叠加,得到目标对象的特征图。
113.其中,可以根据目标对象在雷达回波数据中的距离展宽和脉冲数,将目标所在位置的前后10个距离单元和左右3个波位划分为目标范围,其大小为21*6。具体的,目标对象的各子区域的尺寸都可以为21*6。
114.如图6所示,是通过图3、图4、图5融合得到的目标对象的特征图。其中,坐标0-20表示距离单元;坐标1-6表示波位。
115.步骤205,将目标对象的特征图输入至预设模型,得到目标对象的预测类别。
116.具体的,步骤205与步骤102的原理、实现方式类似,不再赘述。
117.步骤206,根据目标对象的标注类别和预测类别,优化预设模型中的参数,得到雷达目标识别模型。
118.具体的,可以将目标对象的标注类别作为目标对象的预测类别的标签,对预设模型进行训练,优化预设模型中的参数。使得预测类别与标注类别越来越接近。当达到预设条件,比如预测类别与标注类别的相同度达到百分之九十时,停止训练,得到雷达目标识别模型。
119.具体的,雷达目标识别模型可以输出采集的雷达回波数据中包括的目标对象的类别。
120.可选的,雷达目标识别模型中不包括池化层。
121.示例性的,预设模型的输入层大小可以为21*6*3(21个距离单元,6个波位,3个预测类别),使用两个卷积层和两个激活层交替连接,其中第一层卷积大小为3*3*3,步长为1,卷积核个数为16,第二层卷积大小为3*3*3,步长为1,卷积核个数为8,激活函数均采用relu函数,其表达式为f(x)={x,x≥0;0,x<0},其中,x表示relu函数的输入值。由于输入特征图较小,故本网络不设置池化层。最后连接两个全连接层,尺寸分别为100、30,输出层的神经元个数为3,与类别数对应。全连接层的激活函数采用sigmoid函数,其表达式为其中,x表示sigmoid函数的输入值。输出层采用softmax函数,其表达式为其中,j表示所有类别;i表示当前预测类别,z表示softmax函数的输入值。网络的损失函数采用交叉熵损失函数(cross entropy loss function),其表达式为其中,n表示样本数,m为类别数;y
ic
为0或1,样本i的真实类别等于c取1,否则取0;p
ic
为观测样本i属于类别c的预测概率。
122.示例性的,模型训练过程可以采用随机批梯度下降法,学习率设置在0.01-0.1之
间调整,迭代次数epochs设置为在20-100之间调整。对于三类预测类别不平衡问题,采用随机过采样方法保证训练过程中三类样本的数目差别不大。
123.图7为本公开一示例性实施例示出的雷达目标识别方法的流程示意图。
124.如图7所示,本实施例提供的雷达目标识别方法包括:
125.步骤701,获取雷达回波数据,并对雷达回波数据进行预处理得到原始特征图。
126.具体的,步骤701与步骤201的原理、实现方式类似,不再赘述。
127.步骤702,根据原始特征图确定雷达回波数据中包括的目标对象,并根据原始特征图确定目标对象的特征图。
128.具体的,可以利用恒虚警检测方法,在原始特征图中确定雷达回波数据中包括的目标对象。
129.具体的,可以在原始特征图中截取包括目标对象在内的特征图,进而确定目标对象的特征图。
130.可选的,原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;
131.根据目标对象在雷达回波数据的位置信息,在距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图中分别确定与目标对象对应的子区域;子区域中包括目标对象;
132.具体的,可以将雷达的扫描范围划分成m*n的一个网格。其中,m是距离单元个数,n是波位个数。每个距离单元,比如可以设置为1.5米;每个波位比如可以设置为0.5度。
133.具体的,一个波位的雷达回波数据里面可能会有多个目标对象。
134.具体的,可以根据目标对象在雷达回波数据中的距离展宽和脉冲数,将目标所在位置的前后10个距离单元和左右3个波位划分为目标范围,其大小为21*6。
135.其中,在距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图中分别确定与目标对象对应的子区域,各子区域可以分别称为目标对象的距离-脉冲特征图、目标对象的距离-方位特征图、目标对象的距离-多普勒特征图。
136.融合目标对象的各子区域,得到目标对象的特征图。
137.具体的,可以融合目标对象的多个特征图,得到目标对象的特征图。
138.可选的,目标对象的各子区域的尺寸相同;将各子区域内相同位置的特征图数据进行叠加,得到目标对象的特征图。
139.其中,可以根据目标对象在雷达回波数据中的距离展宽和脉冲数,将目标所在位置的前后10个距离单元和左右3个波位划分为目标范围,其大小为21*6。具体的,目标对象的各子区域的尺寸都可以为21*6。
140.步骤703,将目标对象的特征图输入至预设的雷达目标识别模型,得到与目标对象对应的类别;
141.其中,雷达目标识别模型是使用训练数据集训练得到的,训练数据集中包括多组训练数据,训练数据中包括用于训练模型的雷达回波样本数据、雷达回波样本数据中包括的目标对象的特征图以及该目标对象的标注类别。
142.其中,预设的雷达目标识别模型为预先使用训练数据集训练得到的。其中,训练数据集中包括多组训练数据,每组训练数据中包括用于训练模型的雷达回波样本数据,以及雷达回波样本数据中包括的目标对象的特征图、该目标对象的标注类别。
143.其中,通过标注类别训练得到的雷达目标识别模型,能够识别的类别与标注类别中包括的类别相同。具体的,标注类别可以包括多个类别,比如可以包括车辆、船舶、拖球,则预设的雷达目标识别模型可以识别出车辆、船舶、拖球。
144.图8为本公开一示例性实施例示出的模型训练装置的结构图。
145.如图8所示,本公开提供的模型训练装置800,包括:
146.获取单元810,用于获取训练数据集;其中,训练数据集中包括多组训练数据,训练数据中包括雷达回波数据、雷达回波数据中包括的目标对象的特征图以及目标对象的标注类别;
147.训练单元820,用于将目标对象的特征图输入至预设模型,得到目标对象的预测类别;
148.训练单元830,还用于根据目标对象的标注类别和预测类别,优化预设模型中的参数,得到雷达目标识别模型。
149.获取单元810,具体用于获取雷达回波数据,并对雷达回波数据进行预处理得到原始特征图;
150.根据原始特征图确定雷达回波数据中包括的目标对象;
151.根据雷达回波数据确定目标对象的位置信息,并根据目标对象的位置信息,确定目标对象的标注类别;
152.在原始特征图中确定目标对象的特征图。
153.原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;获取单元810,具体用于对雷达回波数据进行脉冲压缩,得到距离-脉冲特征图;对雷达回波数据进行动目标显示,得到距离-方位特征图;对雷达回波数据进行动目标检测,得到距离-多普勒特征图。
154.原始特征图包括距离-脉冲特征图、距离-方位特征图以及距离-多普勒特征图;获取单元810,具体用于根据目标对象在雷达回波数据的位置信息,在距离-脉冲特征图、距离-方位特征图、距离-多普勒特征图中分别确定与目标对象对应的子区域;子区域中包括目标对象;融合目标对象的各子区域,得到目标对象的特征图。
155.目标对象的各子区域的尺寸相同;获取单元810,具体用于将各子区域内相同位置的特征图数据进行叠加,得到目标对象的特征图。
156.可选的,雷达目标识别模型中不包括池化层。
157.可选的,雷达回波数据包括利用相干脉冲雷达对海观测和对地观测的回波数据。
158.图9为本公开一示例性实施例示出的雷达目标识别装置的结构图。
159.如图9所示,本公开提供的雷达目标识别装置900,包括:
160.获取单元910,用于获取雷达回波数据,并对雷达回波数据进行预处理得到原始特征图;
161.处理单元920,用于根据原始特征图确定雷达回波数据中包括的目标对象,并根据原始特征图确定目标对象的特征图;
162.识别单元930,用于将目标对象的特征图输入至预设的雷达目标识别模型,得到与目标对象对应的类别;
163.其中,雷达目标识别模型是使用训练数据集训练得到的,训练数据集中包括多组
训练数据,训练数据中包括用于训练模型的雷达回波样本数据、雷达回波样本数据中包括的目标对象的特征图以及该目标对象的标注类别。
164.图10为本公开一示例性实施例示出的电子设备的结构图。
165.如图10所示,本实施例提供的电子设备包括:
166.存储器1001;
167.处理器1002;以及
168.计算机程序;
169.其中,计算机程序存储在存储器1001中,并配置为由处理器1002执行以实现如上的任一种方法。
170.本实施例还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行以实现如上的任一种方法。
171.本实施例还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时,实现上述任一种方法。
172.本领域普通技术人员可以理解:实现上述各方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成。前述的程序可以存储于一计算机可读取存储介质中。该程序在执行时,执行包括上述各方法实施例的步骤;而前述的存储介质包括:rom、ram、磁碟或者光盘等各种可以存储程序代码的介质。
173.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1