一种遗留物检测的人工智能算法及装置的制作方法
1.本发明涉及视频图像处理与分析技术领域,具体涉及一种遗留物检测的人工智能算法及装置。
背景技术:
2.现有的遗留物检测方法主要有两种:基于目标跟踪的方法和基于目标检测的方法。基于目标跟踪的方法:首先检测前景目标,对进入视频场景中的每个目标进行实时跟踪,根据目标的运动轨迹和时空特性等信息,采用相应的算法对遗留物进行检测。这种方法需要解决进入、跟踪、分割、离开、遮挡等问题,不适用于机场、车站候车厅等人流拥挤、场景复杂的场合;当目标交叉遮挡时无法准确标记跟踪;此外,该类方法耗时长,处理速率低,不适合实时的遗留物检测。
技术实现要素:
3.本发明的目的在于提供一种遗留物检测的人工智能算法及装置,以解决检测速度慢、复杂度高的问题。
4.第一方面,本发明提供的一种遗留物检测的人工智能算法,包括:
5.通过摄像头拍摄,获取图像;
6.对获取的图像进行预处理;
7.对获取的图像,进行目标提取;
8.对目标提取的图像进行遗留物的识别;
9.对遗留物进行是否为可疑遗留物分析;
10.对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标。
11.进一步的,对获取的图像进行预处理,包括:
12.对所述获取的图像进行灰度化处理;
13.对灰度化的图像进行灰度转换,所述灰度转换包括:对图像进行灰度拉伸,使灰度级占据像素值0
‑‑
255整个区域。
14.进一步的,对获取的图像,进行目标提取,包括:
15.采用水平差分算法,利用预处理后的图像后一列像素减去前一列像素,得到所需的目标图像;
16.再对所述目标图像进行二值化处理。
17.进一步的,对目标提取的图像进行遗留物的识别,包括:
18.采用局部特征点算法进行图像识别,图像特征包括颜色特征、纹理特征、形状特征以及局部特征点等,局部特点具有很好的稳定性,不容易受外界环境的干扰。
19.进一步的,对遗留物进行是否为可疑遗留物分析,包括:
20.提取长时间静止的目标,将其保存为可疑的遗留目标,,同时保存该目标对应于当前帧二值化图像和背景中相同区域的图像信息。
21.分别提取保存二值化的图像与当前帧相同区域二值化图像的纹理特征,计算纹理特征的特征相似度,将获取的相似度与设定的相似度阈值进行比较,依据比较结果更新目标相关度,以此为基础进行可疑遗留物的分析。
22.进一步的,对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标,包括:
23.所述相关度≥60%,则判定为可疑遗留物,保存为可疑目标,反之则判定为无效目标,无需保存。
24.第二方面,一种遗留物检测的装置,包括:
25.获取单元,通过摄像头拍摄,获取图像;
26.预处理单元,对获取的图像进行预处理;
27.提取单元,对获取的图像,进行目标提取;
28.识别单元,对目标提取的图像进行遗留物的识别;
29.分析单元,对遗留物进行是否为可疑遗留物分析;
30.判定单元,对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标。
31.本发明的有益效果如下:本发明提供的一种遗留物检测的人工智能算法及装置,通过摄像头拍摄,获取图像;对获取的图像进行预处理;对获取的图像,进行目标提取;对目标提取的图像进行遗留物的识别;对遗留物进行是否为可疑遗留物分析;对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标,从而提升了识别速度和识别精度。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
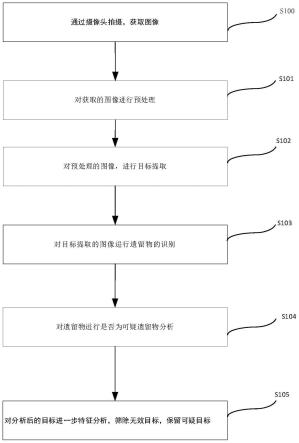
33.图1为本发明一种遗留物检测的人工智能算法的流程图;
34.图2为本发明一种遗留物检测的人工智能算法的思路总图。
35.图3为本发明一种遗留物检测的装置示意图。
具体实施方式
36.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。以下结合附图,详细说明本发明各实施例提供的技术方案。
37.请参阅图1至图2,本发明实施例提供一种遗留物检测的人工智能算法及装置,包括:
38.s100:通过摄像头拍摄,获取图像。
39.通过摄像头拍摄,获取图像。
40.s101:对获取的图像进行预处理。
41.在本实施例中,对获取的图像进行预处理,包括:
42.对所述获取的图像进行灰度化处理;
43.对灰度化的图像进行灰度转换,所述灰度转换包括:对图像进行灰度拉伸,使灰度级占据像素值0
‑‑
255整个区域。
44.s102:对获取的图像,进行目标提取。
45.在本实施例中,:对获取的图像,进行目标提取,包括采用水平差分算法,利用预处理后的图像后一列像素减去前一列像素,得到所需的目标图像;再对所述目标图像进行二值化处理。
46.对图像进行目标提取,提取的最大好处就是能够突出区域,同时使背景图像中无关的部分暗淡。在对其边缘分割后,可以看到目标部分很明显的突现出来。实现方法中,我们采用了水平差分算法,它利用图像后一列像素减去前一列像素,从而得到边缘图像。再对所得的图像二值化处理。
47.s103:对目标提取的图像进行遗留物的识别。
48.在本实施例中,对目标提取的图像进行遗留物的识别,具体可以包括:采用局部特征点算法进行图像识别,图像特征包括颜色特征、纹理特征、形状特征以及局部特征点等,局部特点具有很好的稳定性,不容易受外界环境的干扰。
49.采用局部特征点算法进行图像识别,图像特征包括颜色特征、纹理特征、形状特征以及局部特征点等,局部特点具有很好的稳定性,不容易受外界环境的干扰。
50.图像特征提取是图像分析与图像识别的前提,它是将高维的图像数据进行简化表达最有效的方式,从一幅图像的的数据矩阵中,我们看不出任何信息,所以我们必须根据这些数据提取出图像中的关键信息,一些基本元件以及它们的关系。
51.局部特征点是图像特征的局部表达,它只能反正图像上具有的局部特殊性,所以它只适合于对图像进行匹配,检索等应用。对于图像理解则不太适合。而后者更关心一些全局特征,如颜色分布,纹理特征,主要物体的形状等。全局特征容易受到环境的干扰,光照,旋转,噪声等不利因素都会影响全局特征。相比而言,局部特征点,往往对应着图像中的一些线条交叉,明暗变化的结构中,受到的干扰也少。
52.而斑点与角点是两类局部特征点。斑点通常是指与周围有着颜色和灰度差别的区域,如草原上的一棵树或一栋房子。它是一个区域,所以它比角点的噪能力要强,稳定性要好。而角点则是图像中一边物体的拐角或者线条之间的交叉部分。
53.s104:对遗留物进行是否为可疑遗留物分析。
54.本实施案例中,对遗留物进行是否为可疑遗留物分析,具体可包括:
55.提取长时间静止的目标,将其保存为可疑的遗留目标,同时保存该目标对应于当前帧二值化图像和背景中相同区域的图像信息。
56.分别提取保存二值化的图像与当前帧相同区域二值化图像的纹理特征,计算纹理特征的特征相似度,将获取的相似度与设定的相似度阈值进行比较,依据比较结果更新目标相关度,以此为基础进行可疑遗留物的分析。
57.s105:对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标。
58.在本实施例中,对遗留物进行是否为可疑遗留物分析,所述相关度≥60%,则判定为可疑遗留物,保存为可疑目标,反之则判定为无效目标,无需保存。
59.请参阅图3,本发明实施例还提供一种遗留物检测的装置,包括:
60.获取单元601,通过摄像头拍摄,获取图像;
61.预处理单元602,对获取的图像进行预处理;
62.提取单元603,对获取的图像,进行目标提取;
63.识别单元604,对目标提取的图像进行遗留物的识别;
64.分析单元605,对遗留物进行是否为可疑遗留物分析;
65.判定单元606,对分析后的目标进一步特征分析,筛除无效目标,保留可疑目标。
66.本发明实施例还提供一种存储介质,本发明实施例还提供一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现本发明提供的遗留物检测算法的各实施例中的部分或全部步骤。所述的存储介质可为磁碟、光盘、只读存储记忆体(英文:read-onlymemory,简称:rom)或随机存储记忆体(英文: randomaccessmemory,简称:ram)等。
67.本领域的技术人员可以清楚地了解到本发明实施例中的技术可借助软件加必需的通用硬件平台的方式来实现。基于这样的理解,本发明实施例中的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
68.以上所述的本发明实施方式并不构成对本发明保护范围的限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1