一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法
1.本发明涉及大行程步进缝制领域,尤其涉及一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法。
背景技术:
2.随着汽车行业的快速发展与激烈竞争,汽车的侧安全气帘成为了决定汽车安全性能的重要指标。但由于侧安全气帘长度较长,缝纫图案的数量和形态也更加复杂多变,在实际的生产过程中,如果缝纫效率过低,势必会增加生产的成本。在缝纫速度不变的情况下,如何通过缝纫轨迹规划缩短缝纫机缝纫的总行程,进而降低缝纫总时间,成为提高缝纫机缝纫效率的关键。
3.为保证缝纫的质量和精度,汽车侧安全气帘缝纫的一个完整的缝纫过程应该是缝纫机针头从工作台的原点出发,快速移动到第一个待缝纫环的起始点,缝纫完成该环后从起始点针头抬起,迅速移动到下一个待缝纫环,直至所有环缝纫完成,再回到缝纫原点。其中,若相邻两个待缝纫环位于同一400mm步进缝纫区域时,则针头抬起后可直接移动到下一待缝纫环起始处即可开始缝纫。但若相邻两个待缝纫环位于不同的步进缝纫区域内,则针头在抬起之后,步进装置需将下一待缝纫环所在的400mm区域拖动至工作台面后,再将针头移动至该区域内的待缝纫环起始处进行缝纫。
4.在整个缝纫过程中总时间应由两部分组成,一部分为步进装置用于跨区域步进所消耗的时间,另一部分为针头依次缝纫花饰图案所耗费的时间。为减少第一部分时间应尽可能地使缝纫机顺着缝纫布料某一方向缝纫,根据缝纫机本身的缝纫特性,使其尽量沿x轴正方向缝纫。针头依次缝纫花饰图案所耗费的时间包括空行程过程和缝纫图案轮廓的过程,虽然内外环轮廓的长度是固定不变的,但是根据分析可以知道空行程的长度是可变的,因为缝纫时各个环的缝纫起点的位置选取不同、环的缝纫顺序不同,缝纫轨迹长度都会不一样。路径规划的目的就是尽可能减少步进装置步进次数和针头空行程距离,最终实现高效率的大行程缝纫工作。
技术实现要素:
5.针对现有技术存在的缺陷,本发明提出了一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划的方法,利用分区域方法将缝纫区域分为左右两个集合,然后针对每个集合利用蚁群算法思想进行缝纫路径规划,最后将两个集合的路径合并为一个整体完成总的路径规划。
6.为达到上述目的,本发明采用如下技术方案:
7.一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法,包括步骤如下:
8.步骤1、对缝纫环进行区域划分:以一定间隔将整个侧安全气帘划分为多个缝纫区域,每个区域宽度相同;根据外环缝纫起点所在区域将所有缝纫环划分到左右两个集合;
9.步骤2、缝纫起点确定:利用最近邻原则,对汽车侧安全气帘上独立的缝纫环确定缝纫起点;
10.步骤3、利用蚁群算法思想对左右两个缝纫区域集合分别进行缝纫轨迹规划,模型训练达到既定迭代次数时,输出最佳路径;
11.步骤4、缝纫轨迹合并,将左右两个集合的缝纫轨迹合并为一个,使缝纫过程整体上呈现“左缝纫区域集合-外环-右缝纫区域集合”的顺序,形成最终的缝纫轨迹。
12.进一步地,所述步骤1缝纫环区域划分具体过程如下:
13.步骤1.1、以400mm为间隔,将整个侧安全气帘划分为多个缝纫区域;
14.步骤1.2、根据外环缝纫起点,得到外环起点所属缝纫区域,外环loops的缝纫区域states为k(k∈{1,2,3,4,5,...});
15.步骤1.3、定义两个区域集合loop
left
和loop
right
;对所有的非states区域缝纫环loopn(n=1,2,3,...)进行分区域,划分算法为:
[0016][0017]
其中,loopn为第n个缝纫环,loop
left
为左侧缝纫环集合,loop
right
为右侧缝纫环集合,staten为第n个缝纫环所属缝纫区域,states为外环起点所属缝纫区域;
[0018]
步骤1.4、对states区域缝纫环进行分区域,划分方法为:
[0019]
loopn∈loop
left
[0020]
其中,loopn为第n个缝纫环,loop
left
为左侧缝纫环集合;
[0021]
或者:
[0022]
loopn∈loop
right
[0023]
其中,loopn为第n个缝纫环,loop
right
为右侧缝纫环集合。
[0024]
进一步地,所述步骤2缝纫起点确定的具体过程如下:
[0025]
步骤2.1、对于唯一的外环而言,缝纫起点即为工艺要求的缝纫点,一般为进气口两侧某一个点;
[0026]
步骤2.2、从编程零点出发,缝纫针头移动到距离编程零点最近的内环上的点,把这一点设为当前点;
[0027]
步骤2.3、重复步骤2.2,直到所有内环都被确定唯一的一个缝纫起点;
[0028]
步骤2.4、如果环是曲线,不需再使用最近邻原则,而直接根据其长度选定其上一到三个特征点作为缝纫起点;
[0029]
步骤2.5、将所有的缝纫起点以坐标的形式进行储存。
[0030]
与现有技术相比,本发明具有如下的优点:
[0031]
本发明方法能够有效减少步进装置跨区域步进次数,缩短针头依次缝纫花饰图案所耗费的时间,最终实现高效率的大行程缝纫工作。
附图说明
[0032]
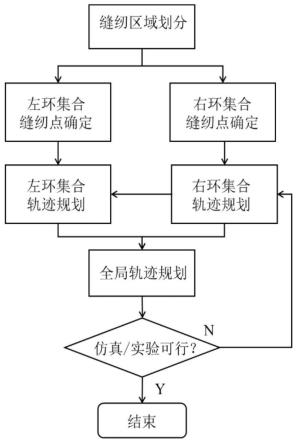
图1为本发明基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法流程图。
[0033]
图2为汽车侧安全气帘实物示意图。
[0034]
图3为缝纫环分区域结果示意图。
[0035]
图4为缝纫点确定结果示意图。
[0036]
图5为左侧集合规划轨迹图。
[0037]
图6为右侧集合规划轨迹图。
[0038]
图7为合并后的整体缝纫轨迹规划图。
具体实施方式
[0039]
为使本发明的目的、技术方案更加清晰,下面将结合附图和实例对本发明作详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0040]
如图1所示,本发明公开了一种基于分区域蚁群算法的汽车侧安全气帘缝纫轨迹规划方法,包括如下步骤:
[0041]
步骤1、将图2所示的安全气帘的缝纫区域进行划分,将所有待缝纫图案划分到左右两个缝纫区域集合中,具体如下:
[0042]
1.1、以每400mm为间隔,将整个侧安全气帘划分为0-400mm、400-800mm、800-1200mm、1200-1600mm、1600-2000mm共五个缝纫区域。
[0043]
1.2、根据外环缝纫起点得到外环起点所属缝纫区域states为缝纫区域3。
[0044]
1.3、定义两个区域集合loop
left
和loop
right
;对所有的不在缝纫区域3中的缝纫环
[0045]
上式中,loopn为第n个缝纫环,loop
left
为左侧缝纫环集合,loop
right
为右侧缝纫环集合,staten为第n个缝纫环所属缝纫区域,states为外环起点所属缝纫区域。
[0046]
从划分规则可以看到,所有属于缝纫区域1和2的缝纫环都被划分到区域集合loop
left
中;所有属于缝纫区域4和5的缝纫环都被划分到loop
right
中。
[0047]
1.4、在缝纫区域3中的缝纫环按工艺要求划分到区域集合loop
left
中,最终的划分结果如图3所示。
[0048]
步骤2、利用最近邻原则对汽车侧安全气帘上独立的缝纫环确定缝纫起点,具体如下:
[0049]
2.1、对于唯一的外环,设计工艺要求从进气口处的缝纫点开始缝制,缝纫点即确定为缝纫起点。
[0050]
2.2、从编程零点出发,缝纫针头移动到距离编程零点最近的内环上的点,把这一点设为当前点。对于离编程零点最近的环而言,缝纫起点即为编程零点与缝纫环的连线与缝纫环的相交处。
[0051]
2.3、重复步骤2.2直到将所有内环都确定一个唯一的缝纫起点。
[0052]
2.4、如果待缝纫环不是圆,则将其视作一般曲线,缝纫起点的确定不需要使用最近邻原则,若长度大于200mm则平均选定其上面三个点作为缝纫起点;若长度小于200mm,平均选定其上面两个点作为缝纫起点即可,最终的缝纫起点确定结果如图4所示。
[0053]
2.5、将所有的缝纫起点确定之后,以坐标形式进行储存。本实施例中的缝纫点坐标如表1所示。
[0054]
表1实例图案缝纫点坐标表(单位:mm)
[0055][0056]
步骤3、利用蚁群算法思想分别对左右两个集合的缝纫起点进行路径规划,具体如下:
[0057]
3.1、初始化算法的各参数,包括信息启发因子α、期望启发因子β、信息素蒸发系数ρ、蚂蚁数目m、信息素强度q以及最大迭代次数g等关键参数;具体设置如表2所示。
[0058]
表2算法主要参数设置表
[0059][0060]
3.2、将表1所示的各坐标点结合步骤1划分的区域集合分别存入缝纫起点矩阵nmpy.array中。
[0061]
3.3、将蚂蚁随机置于这些缝纫起点上,蚂蚁从一个缝纫起点到另一个缝纫起点都要根据状态转移概率进行选择,状态转移概率使用以下算法:
[0062][0063]
其中,p
kij
(t)表示蚂蚁k由缝纫起点i向缝纫起点j前进的个体状态转移概率;allowedk表示蚂蚁k下一步允许选择的缝纫起点;τ
ij
(t)为t时刻路径(i,j)上的信息素浓度;τ
is
(t)为t时刻路径(i,s)上的信息素浓度;η
is
(t)是t时刻路径(i,s)上的局部启发函数;α和β分别为信息素浓度和能见度启发函数的权重系数,α为信息启发式因子,表示轨迹的相对重要性;β为期望启发式因子,表示能见度的相对重要性;η
ij
(t)是t时刻路径(i,j)上的局部启发函数,其表达式如式(2)所示;
[0064]
[0065]
其中,d
ij
表示汽车侧安全气帘中相邻两个缝纫起点之间路径(i,j)的长度;
[0066]
3.4、在禁忌表中添加已经被访问过的缝纫起点。
[0067]
3.5、重复执行步骤(3.3)和(3.4)使蚂蚁爬过所有的缝纫起点。
[0068]
3.6、所有的蚂蚁都进行过一次迭代后清空禁忌表并记录本次迭代的最佳轨迹。
[0069]
3.7、更新每条轨迹上的信息素,信息素计算采用以下算法:
[0070]
τ
ij
(t+n')=(1-ρ)
·
τ
ij
(t)+δτ
ij
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0071][0072]
其中,τ
ij
(t+n')表示t+n'时刻在路径(i,j)上的信息素浓度;1-ρ表示信息素残留系数,ρ的取值范围为:ρ∈[0,1);τ
ij
(t)表示t时刻路径(i,j)上的信息素浓度;δτ
ij
(t)表示t时刻路径(i,j)上的信息素增量,初始时刻δτ
ij
(0)=0;m为蚂蚁总数;表示第k只蚂蚁在t时刻留在路径(i,j)上的信息量,的求解过程如式(5)所示;
[0073][0074]
其中,表示第k只蚂蚁在t时刻留在路径(i,j)上的信息素增量,q表示信息素强度,是一个常量;lk表示第k只蚂蚁在本次循环中所走路径的总长度。
[0075]
3.8、迭代次数达到设定值之后,停止迭代并输出最佳轨迹,实例中的左右集合规划轨迹分别如图5和6所示。
[0076]
步骤4、将左右两个区域集合的轨迹规划合并为一个总的缝纫轨迹,在进行左侧轨迹规划时将外环起点看作轨迹规划的终点,而在右侧环集合的轨迹规划中可将外环起点看作轨迹规划的起点。合并后的缝纫轨迹如图7所示。
[0077]
上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1