基于改进位平面分解和差值扩展的可逆图像水印算法
1.本发明涉及信息隐藏、数字水印技术领域,具体涉及一种基于改进位平面分解和差值 扩展的可逆图像水印算法。
背景技术:
2.数字水印作为一种有效的版权保护手段,受到了广泛的关注。使用数字水印技术在嵌 入一定量的水印时,会使原始图像产生一定的失真。但对一些特殊类型载体,要求在提取 出嵌入的信息后能需无损地恢复出原载体图像,因此,可逆数字水印得到了快速发展。与 数字水印技术区别在于可逆水印技术能够在提取出嵌入的信息后不失真地恢复出原载体图 像,因此,可应用于军事、遥感、医疗等对图像质量需求较高的领域。
3.在嵌入水印信息时,不可避免地会对原始图像产生失真。因此,为降低图像失真,li 等人提出一种基于预测差分扩展的可逆信息隐藏算法,虽然它提高了隐藏图像的视觉质量, 但其嵌入容量很低,并且图像块越大,嵌入容量越低。
4.对于差值扩展,需要定位和压缩像素溢出位置,这是影响嵌入率的一个重要因素。消 除通过差值扩展嵌入水印引起的像素溢出对提高水印算法性能具有重要意义。一种基于差 分直方图的可逆水印嵌入方法,为了避免像素溢出,将像素值调整到一定范围内并记录调 整后像素的位置,这种嵌入技术在溢出处理方面较独特,但它仍然需要嵌入压缩定位映射。
5.结合差值扩展和可逆对比图的可逆水印算法,对每一块中的4个像素将其构成差值扩 展像素对和可逆对比图像像素对,两像素对均可嵌入水印。可逆对比度图像像素对主要用 于嵌入少量的附加信息来代替定位图,嵌入容量得到了很大的提高。然而,其算法中有一 半像素对采用可逆对比度映射变换,图像质量下降较多。一种基于相邻像素差分的可逆水 印嵌入方法,该方法在嵌入水印之前先调整像素值,但是该算法仍然需要嵌入一个小的位 置图。基于差值直方图平移的可逆嵌入方法,该方法为避免像素溢出,平移之前先将像素 值调整到一定范围内,并将调整像素的位置记入定位图,这种嵌入方法在溢出处理方面比 较有特色,但仍需要嵌入压缩定位图。
技术实现要素:
6.发明目的:针对现有技术中存在的问题,本发明提供一种基于改进位平面分解和差值 扩展的可逆图像水印算法,不仅嵌入率高,而且有较高的视觉质量,能实现原始图像的完 全恢复。
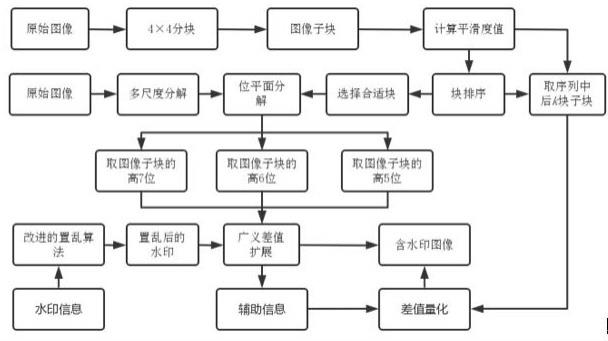
7.技术方案:本发明提供了一种基于改进位平面分解和差值扩展的可逆图像水印算法,包 括水印嵌入方法,包括如下步骤:
8.步骤1:对水印w作arnold变换得到w',对变换后的水印w'转变为一维二进制序列;
9.步骤2:对m
×
n(m、n皆为4的整数倍)大小的原图像i进行块划分,将其划分成大小
为 4
×
4的互不重叠图像块ii,
10.步骤3:利用平滑度计算方法计算所有像素块ii的平滑度值,并将其从小到大稳定排序, 建立排序索引信息表;
11.步骤4:对所有图像块ii进行位平面分解,根据步骤3平滑度值大小,将对应排在前1/3 的图像块生成含有高7位的图像子块将对应排在中间1/3的图像块生成含有高6位的图像 子块,将对应排在后1/3的图像块生成含有高5位的图像子块;
12.步骤5:对于选取的图像子块通过多尺度分解算法将具有突兀点的图像子块删除;
13.步骤6:根据水印容量嵌入需要,选取序列中排在前面的n块像素子块,将选取的已去 除突兀点的m块图像子块去除,对n-m块图像块进行嵌入水印信息,同时记录下含突兀点的 图像子块排序序号;
14.步骤7:对所选取的任一子块(0≤i≤n)利用广义差值扩展算法进行水印嵌入;对于利 用广义差值扩展算法嵌入信息后会超出图像灰度值范围的像素点,在溢出图中标注,并压缩 溢出图,将其与水印嵌入量和水印置乱次数的辅助信息隐藏到原始载体图像的纹理复杂块中;
15.步骤8:对原始图像i中未被用来嵌入水印信息的对应图像块,选取序列中后k块子块,恢 复到未进行位平面分解时的状态,对选择的每个像素块中每个像素利用差值量化的方法实现 辅助信息的嵌入;
16.步骤9:通过广义差值扩展和差值量化算法嵌入水印信息后,生成含水印图像i”。
17.进一步地,与所述水印嵌入方法对应的还包括水印提取方法,所述水印提取方法包括如 下步骤:
18.step1:对m
×
n(m、n皆为4的整数倍)大小的含水印图像i”进行块划分,将其划分成 大小为4
×
4的互不重叠图像块i
i”,
19.step2:利用平滑度计算方法计算所有像素块i
i”的平滑度值,然后将平滑度值从小到 大稳定排序并生成排序索引信息表;
20.step3:对原始水印图像i”进行位平面分解,根据step2中的平滑度值大小,将排在前1/3的块生成含有高7位的图像子块i
′i,将排在中间1/3的块生成含有高6位的图像子块i
′i,将 排在后1/3的块生成含有高5位的图像子块i
′i;
21.step4:对选取序列中后k块子块恢复到未进行位平面分解时的状态,对选择的每个像 素块中每个像素利用差值量化的方法提取出辅助信息;
22.step5:根据step4提取出的辅助信息,利用逆广义差值扩展算法从排序好的前n块 提取出水印,且前n块去除了含有突兀点的m块图像子块;通过arnold反置乱恢复出水印 信息w;
23.step6:对提取出水印信息后恢复出的低位位平面的图像i"',结合位平面分解出的对 应高位位平面得到图像i,并和提取出辅助信息后得到的图像结合在一起,得到最终图像a。
24.进一步地,所述步骤1中的对水印w作arnold变换得到w'的具体操作为:
图像中像素对差值若为奇数,则嵌入的水印信息为1,否则为0。
43.有益效果:
44.本发明为了提高现有可逆图像水印算法的视觉质量和嵌入率,提出了一种基于改进位 平面分解和差值扩展的可逆图像水印算法。首先,通过平滑度计算算法对划分图像块进行 平滑度计算并按此进行排序。再对选取的每个平滑块进行位平面分解,利用多尺度分解去 除含突兀点图像子块。最后利用广义差值扩展算法和差值量化算法将置乱后的水印信息和 辅助信息嵌入到载体图像中。实验结果表明该算法不仅嵌入率高,而且有较高的视觉质量, 能实现原始图像的完全恢复,和其它算法相比,具有一定的优势。
附图说明
45.图1为本发明算法水印嵌入流程图;
46.图2为本发明算法中使用的试验图,其中a为lena图,b为barbara图,c为baboon 图,d为pepper图;
47.图3为本发明中试验使用的水印图像;
48.图4为本发明原始载体图像位平面分解结构图;
49.图5为本发明原始图像和低6位位平面重构图;
50.图6为本发明算法实验视觉效果对比图。
具体实施方式
51.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术 方案,而不能以此来限制本发明的保护范围。
52.本发明提供了一种基于改进位平面分解和差值扩展的可逆图像水印算法,包括水印嵌入 方法,包括如下步骤:
53.步骤1:对水印w作arnold变换得到w',对变换后的水印w'转变为一维二进制序列。
54.对水印w作arnold变换得到w'的具体操作为:
[0055][0056]
其中,(x,y)为原各像素坐标,(x
′
,y
′
)为变换后的各像素坐标,m为图像大小,c、d为置乱 次数,且c、d随机生成。
[0057]
步骤2:对m
×
n(m、n皆为4的整数倍)大小的原图像i进行块划分,将其划分成大小为 4
×
4的互不重叠图像块ii,
[0058]
步骤3:利用文献(zhengwei zhang,lifa wu,yunyang yan,shaozhang xiao,he sun.animproved reversible image watermarking algorithm based on difference expansion. international journal ofdistributed sensor networks,2017,13(1):1-15.)文献中的平滑度计算 方法计算所有像素块ii的平滑度值,并将其从小到大稳定排序,建立排序索引信息表。
[0059]
步骤4:对所有图像块ii进行位平面分解,根据步骤3平滑度值大小,将对应排在前1/3 的图像块生成含有高7位的图像子块,将对应排在中间1/3的图像块生成含有高6位
的图像 子块,将对应排在后1/3的图像块生成含有高5位的图像子块。
[0060]
对于对应排在前1/3的块,假设两个像素值为90和93,取两个像素的高7位(0101101、 0101110)进行差值扩展,假设嵌入的水印为1,则新生成的两个像素值分别为45和46。通过 并上原始两个像素值的最低位,则两个含水印的像素值分别为90和93。假设嵌入的水印为0, 则生成的新两个像素值分别为44和46,通过并上原始两个像素值的最低位,则两个含水印 的像素值分别为88和93。
[0061]
将图像进行位平面分解,原始载体图像为8位的灰度图像,将其划分为8个位平面,选 取其中低6位位平面组合在一起构成新的图像,如图4。
[0062]
在去除最高两位位平面后,得到的只含低6位位平面图像如图5所示。
[0063]
步骤5:对于选取的图像子块通过多尺度分解算法(zhengwei zhang,he sun,shangbinggao,shenghua jin.self-recovery reversible image watermarking algorithm.plos one,2018, 13(6):e0199143)将具有突兀点的图像子块删除。
[0064]
步骤6:根据水印容量嵌入需要,选取序列中排在前面的n块像素子块,将选取的已去 除突兀点的m块图像子块去除,对n-m块图像块进行嵌入水印信息,同时记录下含突兀点的 图像子块排序序号。
[0065]
步骤7:对所选取的任一子块(0≤i≤n)利用广义差值扩展算法进行水印嵌入;对于利 用广义差值扩展算法嵌入信息后会超出图像灰度值范围的像素点,在溢出图中标注,并压缩 溢出图,将其与水印嵌入量和水印置乱次数b(c和d)等辅助信息隐藏到原始载体图像的纹 理复杂块中。
[0066]
通过广义差值扩展算法嵌入水印后可能会产生溢出,其溢出处理会对水印的嵌入容量 产生重大影响。在本发明中将通过广义差值扩展算法嵌入水印后产生的溢出点在和原图像 同样大小的图像中进行标注,生成的定位图是以0和1标识的二值图像。
[0067]
步骤8:对原始图像i中未被用来嵌入水印信息的对应图像块,即纹理复杂度较高的原始 像素块,选取序列中后k块子块,恢复到未进行位平面分解时的状态,此时块中每个像素值用 8位二进制数来表示。对选择的每个像素块中每个像素利用差值量化的方法实现辅助信息的嵌 入。
[0068]
具体过程为:
[0069]
1)计算平滑度值排序序列中后k块子块对应的原始图像像素块,计算块中每个子块的像 素均值。
[0070][0071]
其中,m、n分别为所划分子块的行和列大小,x1,x2,
…
,xm×n为子块中所含像素点;
[0072]
2)提取每个子块中最大像素值和最小像素值,利用差值量化进行辅助信息嵌入:
[0073]
2.1)利用最小像素值和均值进行比较嵌入辅助信息:
[0074][0075]
其中,a表示待嵌入像素点值,表示所嵌入像素点所在子块像素点的平均值,w表示 嵌入的二进制水印信息,%表示求余;
[0076]
2.2)最大像素值和均值进行比较嵌入辅助信息:
[0077][0078]
其中,a表示待嵌入像素点值,表示所嵌入像素点所在子块像素点的平均值,w表示嵌 入的二进制水印信息,%表示求余。
[0079]
步骤9:通过广义差值扩展和差值量化算法嵌入水印信息后,生成含水印图像i”。
[0080]
与上述水印嵌入方法对应的还包括水印提取方法,假设对原始图像中任一像素对(x,y) 通过差值扩展进行水印信息的嵌入。若嵌入的水印信息为1时,则新产生的像素对(a,b)值 为:
[0081][0082][0083]
因此a
–
b=2x-2y+1。
[0084]
所以在任一像素对中当嵌入的一位水印信息为1时,则得到的新的像素对差值为奇数值。 同理,若嵌入的水印信息为0时,则得到的新的像素对差值为偶数值。通过此方法,当我们 恢复原始载体图像时,若水印图像中像素对(a,b)其差值若为奇数,则代表嵌入的水印信息 为1,否则为0。通过此方法就可以提取出水印信息。
[0085]
所以,水印提取方法包括如下步骤:
[0086]
step1:对m
×
n(m、n皆为4的整数倍)大小的含水印图像i”进行块划分,将其划分成 大小为4
×
4的互不重叠图像块i
i”,
[0087]
step2:利用平滑度计算方法计算所有像素块i
i”的平滑度值,然后将平滑度值从小到 大稳定排序并生成排序索引信息表。
[0088]
step3:对原始水印图像i”进行位平面分解,根据step2中的平滑度值大小,将排在前 1/3的块生成含有高7位的图像子块i
′i,将排在中间1/3的块生成含有高6位的图像子块i
′i,将 排在后1/3的块生成含有高5位的图像子块i
′i。
[0089]
step4:对选取序列中后k块子块恢复到未进行位平面分解时的状态,对选择的每个像 素块中每个像素利用差值量化的方法提取出辅助信息。
[0090]
差值量化方法提取辅助信息为设在嵌入辅助信息时,先利用最小像素值来嵌入辅助信 息,再利用最大像素值来嵌入辅助信息,则在提取辅助信息时,先利用最大像素值来提取 辅助信息,再利用最小像素值来提取辅助信息,可保持图像块中最小像素值和最大像素值 与像素块平均值之间的奇偶关系在辅助信息嵌入前后保持一致,即:
[0091][0092]
其中,a表示待嵌入像素点值,表示所嵌入像素点所在子块像素点的平均值,w表示 嵌入的二进制水印信息,%表示求余。
[0093]
step5:根据step4提取出的辅助信息,利用逆广义差值扩展算法从排序好的前n块 提取出水印,且前n块去除了含有突兀点的m块图像子块;通过arnold反置乱恢复出水印 信息w。
[0094]
step6:对提取出水印信息后恢复出的低位位平面的图像i"',结合位平面分解出的对 应高位位平面得到图像i,并和提取出辅助信息后得到的图像结合在一起,得到最终图像a。
[0095]
本发明在提取出水印后能完全恢复出原载体图像,实现了算法可逆。可用原始图像与提 取水印后恢复出的载体图像的相关系数(normalized correlation,nc)进行衡量。
[0096]
表1无攻击时完整性评估表
[0097][0098]
表1显示了基于本发明算法的4种不同类型的水印图像在不受任何攻击的情况下的结果 的完整性。结果表明,本发明算法能够在不受攻击的情况下完全恢复原始图像。这表明该算 法是可逆的。
[0099]
对原始载体图像采用4
×
4分块后利用本发明算法与算法一(hala s.el-sayed,s.f. el-zoghdy,osama s.faragallah.adaptive difference expansion-based reversible data hidingscheme for digital images.arabian journal for science and engineering,2016,41:1091-1107.)进 行psnr和ssim的比较,如表2所示。
[0100]
表2算法视觉质量分析
[0101][0102]
该发明算法针对图2中4幅原始载体图像嵌入水印信息后,其psnr值最可高达59.35db, 相比算法一具有更好的不可见性。同时相比较算法一,其ssim也是更高。从表2可以看出, 在嵌入相同量的水印信息,本发明算法要比算法一有更好的psnr和ssim值。这也说明了 本发明研究的算法具有更好的视觉质量。具体视觉效果以及水印提取效果见附图6。
[0103]
从这些图观测发现,人眼感觉不到水印图像中水印信息的存在。含水印图像视觉效果较 好,其相应psnr值说明对不同类型图像本算法具有较好的不可感知性,平均psnr值高达 58.42db。
[0104]
从表2和图6可以看出,本发明算法对不同纹理类型图像都有着较好的视觉感知。
[0105]
为了估算原始图像的最大水印嵌入容量,本发明需要对原始图像中的所有块(除
了找出 的含突兀点块)进行水印嵌入。
[0106]
表3水印算法性能比较
[0107][0108][0109]
表3中,10,30,70,90and 100%是指待嵌入水印容量占最大嵌入容量的比重。在嵌入最 大嵌入容量的10,30,70,90and 100%时,利用psnr来评估含水印图像的视觉质量。从上表 3不难看出,本发明提出的可逆水印算法在有效载荷能力方面要优于算法二(zhengwei zhang, lifa wu,yunyang yan,et al.an improved reversible image watermarking algorithm based ondifference expansion.international journal ofdistributed sensor networks,2017,13(1):1-15.)和 算法三(hala s.el-sayed,s.f.el-zoghdy,osama s.faragallah.adaptive differenceexpansion-based reversible data hiding scheme for digital images.arabian journal for scienceand engineering,2016,41:1091-1107.),同时具有良好的ssim和psnr值。这里给出的结果 表明,本发明提出的基于差值扩展和位平面分解的可逆水印技术大大增加了有效载荷能力, 同时仍保持良好的含水印图像视觉质量。
[0110]
该发明算法的性能与算法四(soliman m m,hassanien a e,onsi h m.an adaptivewatermarking approach based on weighted quantum particle swarm optimization.neuralcomputing&applications,2016,27(2):1-13.)、算法五(yin z,niu x,zhou z,et al.improvedreversible image authentication scheme.cognitive computation,2016,8(5):1-10.)和算法六 (hiary s,jafar i,hiary h.an efficient multi-predictor reversible data hiding algorithm based onperformance evaluation of different prediction schemes.multimedia tools&applications,2017, 76(2):1-27.)性能进行了比较,结果如表4所示。
[0111]
表4不同算法的峰值信噪比和最大有效载荷比较
[0112][0113]
其中,算法四选择四个子图嵌入数据,嵌入参数l设置为0;算法五选择双线性插值法, 参数t1和t0的值设置为8和60;算法六是在预测差值扩展的基础上嵌入水印。本发明采用 差值扩展算法嵌入水印,并将块大小设置为4
×
4。仿真结果表明,该算法的性能优于算法四、 算法五和算法六。与算法四和算法五相比,对于简单的纹理图像,该算法的视觉质量和最大 负载都有所提高。对于纹理复杂的图像,该算法的性能略有下降,但通过调整参数可以提高 算法的性能。与算法六相比,该算法产生更多的预测错误比特,可以更充分地利用这些比特, 并且可以嵌入到更大的容量中。例如,对于测试图像lena,如果块大小设置为4
×
4,则获得 的水印图像质量为36.47db,最大有效负载为234432bit,这比其他三种算法略好。在保持良 好视觉质量的前提下,使用该算法嵌入的最大容量远远高于其他算法。
[0114]
上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能 够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神 实质所做的等效变换或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1