一种多传感器融合的车位检测方法与流程
1.本发明涉及车位检测方法领域,尤其涉及一种多传感器融合的车位检测方法。
背景技术:
2.近年来,随着国民经济的快速增长,社会的迅速进步和国力的不断增强,人们的工作生活环境发生了巨大的变化。城市人口日益密集,拥有私家车的家庭也越来越多,而停车场中车位有限,车主往往在寻找停车位泊车上花费大量时间,这与快节奏的城市生活不符,因此需要一个快捷有效的自动泊车系统。
3.停车位检测是自动泊车系统中非常重要的一个环节,目前车位检测方法对泊车环境和停车位的车位线要求较为苛刻,现有的车位检测方法只能获取车辆周围的图像信息,不具备自动判断是否可停车的功能,具有一定的局限性。
技术实现要素:
4.本发明的目的在于提出了一种可以自动判断是否可停车的多传感器融合的车位检测方法。
5.本发明所采用的技术方案为:一种多传感器融合的车位检测方法,其特征在于:包括以下步骤:
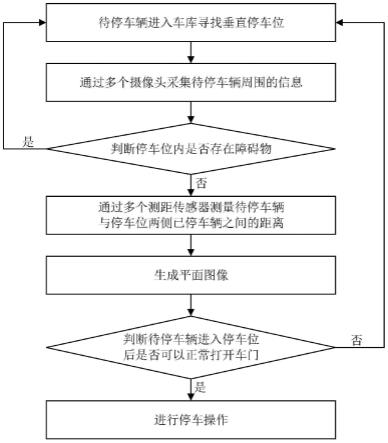
6.步骤一:待停车辆进入车库寻找垂直停车位,通过多个摄像头采集待停车辆周围的信息;
7.步骤二:通过采集的待停车辆周围信息判断停车位内是否存在障碍物;
8.步骤三:若停车位内存在障碍物,则不可停车,继续寻找垂直停车位;
9.步骤四:若停车位内无障碍物,则通过多个测距传感器测量待停车辆与停车位两侧已停车辆之间的距离;
10.步骤五:结合步骤一中摄像头采集的待停车辆周围信息生成平面图像;
11.步骤六:通过检测算法判断待停车辆进入停车位后是否可以正常打开车门;
12.步骤七:若不可打开车门,则不可停车,继续寻找垂直停车位;若可正常打开车门,则进行停车操作。
13.多个所述摄像头分别设置在待停车辆两侧;多个所述测距传感器分别设置在待停车辆的四个角。
14.所述平面图像为待停车辆和两个已停车辆位置图像。
15.所述检测算法为计算出两个待停车辆之间的距离,所述检测算法包括算法a和算法b。
16.所述算法a为待停车辆处于两个已停车辆前方之间时的情况,计算两个待停车辆之间的距离:lx=l
长
+lc
11
+lc
12
;判断lx与lt之间的大小:
17.若lx》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若lx《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
18.所述算法b为待停车辆处于其中一个已停车辆前方时的情况,计算两个待停车辆之间的距离:ly=l
长
+lc
21-lc
22
;判断ly与lt之间的大小:
19.若ly》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若ly《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
20.其中lx为两个待停车辆之间的距离、l
长
为待停车辆的长度;所述lt为待停车辆的宽度与两个车门长度的总和:lt=l
宽
+2l
门
,其中l
宽
为待停车辆的宽度、l
门
为待停车辆车门的长度;
21.所述算法a中lc
11
为车头与其中一个已停车辆之间的横向距离、lc
12
为车尾与另一个已停车辆之间的横向距离;
22.所述算法b中lc
21
为车头与其中一个已停车辆之间的横向距离、lc
22
为车位与另一个已停车辆侧门之间的横向距离。
23.所述lc
11
、lc
12
、lc
21
、lc
22
均可通过测距传感器测量出距离。
24.本发明的有益效果:本发明通过多个测距传感器相互配合,并结合车位检测算法,可以判断处此车位是否可以停车,节省了车主大量的判断时间,避免了车主停错停车位,从而减少损失的时间。本发明通过车位检测算法自动判断待停车辆是否可以停车,节省了车主的时间,具有很大的应用价值和推广价值。
附图说明
25.图1是本发明一种多传感器融合的车位检测方法的整体流程图;
26.图2是本发明一种多传感器融合的车位检测方法的待停车辆示意图;
27.图3是本发明一种多传感器融合的车位检测方法的算法a演示图;
28.图4是本发明一种多传感器融合的车位检测方法的算法b演示图。
具体实施方式
29.本发明不受下述实施例的限制,可根据本发明的技术方案与实际情况来确定具体的实施方式。
30.一种多传感器融合的车位检测方法,其特征在于:包括以下步骤:
31.步骤一:待停车辆进入车库寻找垂直停车位,通过多个摄像头采集待停车辆周围的信息;
32.步骤二:通过采集的待停车辆周围信息判断停车位内是否存在障碍物;
33.步骤三:若停车位内存在障碍物,则不可停车,继续寻找垂直停车位;
34.步骤四:若停车位内无障碍物,则通过多个测距传感器测量待停车辆与停车位两侧已停车辆之间的距离;
35.步骤五:结合步骤一中摄像头采集的待停车辆周围信息生成平面图像;
36.步骤六:通过检测算法判断待停车辆进入停车位后是否可以正常打开车门;
37.步骤七:若不可打开车门,则不可停车,继续寻找垂直停车位;若可正常打开车门,则进行停车操作。
38.多个所述摄像头分别设置在待停车辆两侧;多个所述测距传感器分别设置在待停车辆的四个角。
39.所述平面图像为待停车辆和两个已停车辆位置图像。
40.所述检测算法为计算出两个待停车辆之间的距离,所述检测算法包括算法a和算法b。
41.所述算法a为待停车辆处于两个已停车辆前方之间时的情况,计算两个待停车辆之间的距离:lx=l
长
+lc
11
+lc
12
;判断lx与lt之间的大小:
42.若lx》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若lx《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
43.所述算法b为待停车辆处于其中一个已停车辆前方时的情况,计算两个待停车辆之间的距离:ly=l
长
+lc
21-lc
22
;判断ly与lt之间的大小:
44.若ly》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若ly《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
45.其中lx为两个待停车辆之间的距离、l
长
为待停车辆的长度;所述lt为待停车辆的宽度与两个车门长度的总和:lt=l
宽
+2l
门
,其中l
宽
为待停车辆的宽度、l
门
为待停车辆车门的长度;
46.所述算法a中lc
11
为车头与其中一个已停车辆之间的横向距离、lc
12
为车尾与另一个已停车辆之间的横向距离;
47.所述算法b中lc
21
为车头与其中一个已停车辆之间的横向距离、lc
22
为车位与另一个已停车辆侧门之间的横向距离。
48.所述lc
11
、lc
12
、lc
21
、lc
22
均可通过测距传感器测量出距离。
49.待停车辆进入车库寻找垂直停车位,通过多个摄像头采集待停车辆周围的信息并通过采集的待停车辆周围信息判断停车位内是否存在障碍物;若停车位内存在障碍物,则不可停车,继续寻找垂直停车位,若停车位内无障碍物,则通过多个测距传感器测量待停车辆与停车位两侧已停车辆之间的距离;结合摄像头采集的待停车辆周围信息生成平面图像并通过检测算法判断待停车辆进入停车位后是否可以正常打开车门。
50.实施例1:
51.结合附图说明图3,当待停车辆停在如图3所示的位置时,通过测距传感器可以测量出lc
11
和lc
12
的长度,通过lx=l
长
+lc
11
+lc
12
计算出lx的长度;若lx》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若lx《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
52.实施例2:
53.结合附图说明图4,当待停车辆停在如图4所示的位置时,通过测距传感器可以测量出lc
21
和lc
22
的长度,通过ly=l
长
+lc
21-lc
22
计算出ly的长度;若ly》lt,则待停车辆进入停车位后可以正常打开车门,即可停车并进行停车操作;若ly《lt,则待停车辆进入停车位后不可以打开车门,即不可停车,继续寻找停车位。
54.通过上述实施例1和实施例2可知,本发明可以推广车位检测算法自动判断待停车辆是否可以停车,节省了车主大量的判断时间,避免了车主停错停车位,从而减少了损失的时间,具有很大的应用前景。
55.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例
所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1