一种雷达机电液系统数字孪生模型构建方法与流程
1.本发明属于雷达技术领域,涉及一种雷达机电液系统数字孪生模型构建方法。
背景技术:
2.雷达装备是高精度、高集成的复杂机电产品,具有结构组成复杂、多学科交叉耦合、服役环境恶劣、维护保障要求高等特点。日趋激烈的市场竞争促使雷达研制模式和保障形式转型升级,以满足高可靠、高质量、短周期、优异保障能力的要求。传统研制模式以物理样机验证为主,成本高、风险大、周期长,难以满足目前的技术发展需求。
技术实现要素:
3.为解决现有技术存在的难题,本发明提供了一种雷达机电液系统数字孪生模型构建方法,包括以下步骤:
4.获取雷达机电液系统的训练数据;
5.对训练数据进行处理;
6.利用处理过的训练数据生成多个动态降阶模型;
7.将多个动态降阶模型串联搭建数字孪生模型。
8.进一步地,所述对训练数据进行处理为对训练数据进行清洗过滤,所述清洗过滤采用的是去除测试信号噪声。
9.进一步地,所述生成动态降阶模型的步骤具体包括:
10.采用矩阵分解技术对处理过的激励与响应训练数据进行数据压缩;
11.采用瞬态仿真模型降阶算法建立激励数据和响应数据之间的降阶模型。
12.进一步地,所述训练数据包括激励数据和响应数据。
13.进一步地,所述训练数据具体为包含雷达天线阵面抬升、倒竖及举升三路动作的机电液系统联合仿真结果数据。
14.进一步地,在进行数字孪生模型的搭建时,采用twinbuilder软件进行抬升、倒竖及举升三路动作分别对应的抬升系统、倒竖系统和举升系统对应的数字孪生模型的搭建。
15.进一步地,将处理过的训练数据导出为激励数据和响应数据对应的csv文件。
16.进一步地,所述建立激励数据和响应数据之间的降阶模型时,将激励和响应数据对应的csv文件导入动态降阶模型构建生成器中进行学习生成动态降阶模型;将不同的物理量分别单独学习生成不同的动态降阶模型。
17.进一步地,所述激励数据对应的文件扩展名“_exc”,响应数据对应的文件扩展名“_out”。
18.与现有技术相比,本发明的有益效果为:
19.(1)本发明旨在依据机电液系统建立机电液数字孪生模型实现雷达架撤系统可视化仿真的实时更新,从而提高雷达架撤系统的可靠性及机动性能。
20.(2)本发明的方法可使得机电液系统采集的数据直接驱动机电液数字孪生模型,
部分数据也可用于仿真模型修正校核,从而得到准确的实时数字仿真模型,实现仿真数据与物理样机实测数据的等效性。
附图说明
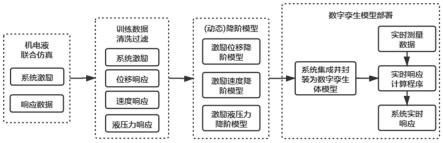
21.图1为实施例一的流程图。
22.图2为倒竖动作的训练数据的示例。
23.图3为机电液系统联合仿真的速度结果。
24.图4为激励和响应数据清洗过滤模型。
25.图5为datapairs模型设置的示例。
26.图6为filter model模型参数设置的示例。
27.图7为secondorder模型参数设置的示例。
28.图8为仿真求解器设置的示例图。
29.图9为速度响应数据光顺曲线的示例图。
30.图10为输出.csv文件过程图
31.图11为导入训练数据的示意图。
32.图12为每一种信号对应的位移响应。
33.图13为选择建立降阶模型的响应数据的示意图。
34.图14为对响应数据进行压缩的示意图。
35.图15为设置rom精度并建立降阶模型的示意图。
36.图16为利用训练生成的抬升、倒竖和举升动态降阶模型的示意图。
37.图17为方波动态降阶模型的验证结果。
38.图18为正弦波动态降阶模型的验证结果。
39.图19为建立抬升系统速度响应的示意图。
40.图20为建立抬升系统流量响应的示意图。
41.图21为抬升系统数字孪生模型封装设置的示意图。
42.图22为抬升系统数字孪生模型封装的示意图。
43.图23为抬升系统数字孪生模型编译1的示意图。
44.图24为抬升系统数字孪生模型编译2的示意图。
45.图25为抬升系统twin模型输出1的示意图。
46.图26为抬升系统twin模型输出2的示意图。
47.图27为抬升系统twin模型输出3的示意图。
48.图28为抬升系统twin模型输出4的示意图。
49.图29为倒竖系统twin模型的示意图。
50.图30为举升系统twin模型的示意图。
51.图31为twin deployer导入抬升系统twin文件的示意图。
52.图32为在twin deployer中进行仿真计算的示意图。
53.图33为在twin deployer进行sdk文件夹输出设置的示意图。
54.图34为抬升系统可执行sdk文件目录的示意图。
55.图35为抬升系统sdk文件夹执行时间的示意图。
56.图36为抬升系统可执行sdk程序生成的结果的曲线图。
57.图37为倒竖系统sdk文件夹执行时间的示意图。
58.图38为倒竖系统sdk文件夹执行结果的示意图。
59.图39为举升系统sdk文件夹执行时间的示意图。
60.图40为举升系统sdk文件夹执行结果的示意图。
具体实施方式
61.下面结合实施例并参照附图对本发明作进一步详细描述。
62.实施例一:
63.机电液系统监测系统物理样机的运行状态,并记录系统的激励和响应数据。将该激励和响应数据作为dynamic rom的训练数据,生成动态降阶模型并搭建数字孪生模型。然后对数字孪生模型进行封装,最后生成可执行sdk文件夹,并部署到数字孪生平台进行结果展示。
64.如图1所示,本实施例提供了一种雷达机电液系统数字孪生模型构建方法,包括训练数据准备、数据的清洗过滤、动态降阶模型的生成和数字孪生体模型的部署四个步骤,训练数据准备是雷达机电液系统数字孪生模型构建的数据基础,为下一步的清洗过滤做数据准备;完成清洗过滤后的数据可以用于动态降阶模型的生成;基于生成的动态降阶模型,并结合机电液的各子系统之间的逻辑关系,搭建最终的机电液系统数字孪生模型,从而实现在物联网系统上进行部署。
65.(1)训练数据准备
66.训练数据准备可以采用控制系统仿真软件、液压系统仿真软件、多体动力学仿真软件等工具生成所需要的训练数据。对于系统复杂度相对较低的机电液系统,可采用机电液系统整体联合仿真进行训练数据生成;对于系统复杂度相对较高的机电液系统,可采用机电液各子系统进行训练数据生成,然后在后续的数字孪生体模型的部署中集成。
67.以机电液系统为例,明确机电液系统输入输出变量、变量属性、变量的单位、变量的名称等,从而生成包含雷达天线阵面抬升、倒竖及举升三路动作的机电液系统联合仿真结果数据,图2为倒竖动作的训练数据的示例。
68.所述机电液系统联合仿真结果数据包括激励数据和响应数据;所述激励数据包括有油缸力和阀电流,所述响应数据包括位移、速度和液压力。
69.(2)仿真数据清洗过滤
70.数据清洗过滤可以采用去除测试信号噪声的方法,例如采用低筒滤波、二阶振荡环节等滤波技术,用于去除激励数据和响应数据中失真的数据,使训练数据更符合系统工况且数据更加平滑。
71.激励数据和响应数据存在许多锯齿形状的曲线,twin builder(一种数字孪生模型构建软件)无法用于这些激励和响应数据直接训练生成降阶模型。以阵面抬升过程中速度的数据仿真结果为例,可以看到数据存在明显的锯齿状波动,如图3的实线框中放大的锯齿状曲线所示。
72.可以使用twin builder基本模型库中basic elements library
–
tool-datapairs(时间曲线模型),basic elements library
–
block-filter,以及modelica语言的基础模型
库中的secondorder模型,在twin builder中搭建对激励和响应数据进行清洗过滤的模型,用于机电液系统动态降阶模型训练数据的生成,使原始训练数据曲线变得更加光顺和平滑。数据清洗过滤模型结构,如图4所示,其中深色部分为原始响应数据,深色中间的浅色部分为经清洗过滤处理后的响应数据。
73.使用datapairs模型(分别导入激励和响应数据):如图5所示,datapairs1为位移响应数据;datapairs2为速度响应数据;datapairs3液压力响应数据,datapairs4为脉冲激励数据。
74.使用filter model对数据进行低频滤波,对于不同物理量,低频滤波参数需做相应的调整,以尽可能逼近真实数据。模型参数设置如图6所示;
75.使用基于modelica语言基础模型库中的secondorder对数据进行平滑处理,模型参数设置如图7所示:
76.仿真求解器设置如下:时长47s,step为0.01s,设置如图8所示。
77.图9中展示了阵面在正弦电流型号作用下抬升过程中,速度响应曲线前后不同的形状(深色部分为原始响应数,浅色部分为清洗过滤后的响应数据);将得到的数据导出为对应激励和响应的csv文件,包括脉冲波、正弦波和三角波,具体内容如图10所示。
78.(3)动态降阶模型生成
79.动态降阶模型生成,在瞬态仿真分析中,激励数据往往存在相互关联,而响应数据常常有相同的物理量。在动态降阶模型生成过程中,首先可以采用矩阵分解技术(如奇异值分解法)对处理过的激励与响应训练数据进行数据压缩,并验证压缩后数据结果精度;然后选择合适的瞬态仿真模型降阶算法(eluer、龙格-库塔等数值计算方法)建立激励和响应之间的降阶模型;最后需验证降阶模型计算结果的精度。
80.3.1、机电液系统降阶模型生成
81.将激励和响应数据的csv文件导入动态降阶模型构建生成器中进行学习生成rom模型。鉴于位移、速度、液压力在数量级上的差别,将以上物理量分别单独学习生成rom模型。图11为导入训练数据的示意图。在创建动态降阶模型时,需要建立一个激励响应数据存储文件夹。每一个文件夹必须包含两个文件,分别为激励文件和响应文件,文件扩展名为*.csv,激励数据对应文件扩展名“_exc”,响应数据对应文件扩展名“_out”。
82.查看每一种信号曲线(常数、脉冲、三角波、正弦波),以及每一种信号下对应的位移、速度、液压力的输出响应,如图12为每一种信号对应的位移响应;图13为选择建立降阶模型的响应数据的示意图;图14为对响应数据进行压缩的示意图;图15为设置降阶模型精度并建立降阶模型的示意图;图16为利用训练生成的抬升、倒竖和举升动态降阶模型的示意图。
83.3.2、动态降阶模型精度验证
84.将输入测试数据导入,同时与动态降阶模型系统模型连接,搭建系统仿真模型,将模型仿真数据与输出验证数据进行对比。结果如图17和图18所示,模型精度满足需求。
85.(5)数字孪生体模型部署
86.根据机电液系统类型,按照子系统之间相互关系,将生成的多个激励和响应的动态降阶模型串联,搭建完整系统数字孪生体模型。基于数字孪生体模型所运行平台的接口要求,生成可实时响应的可执行程序代码。最终可执行程序在数字孪生系统平台上进行分
析计算并实时响应,实现机电液系统仿真分析在脱离常规仿真分析工具下的数字孪生体模型的轻量化部署。
87.鉴于机电液系统不同物理量涉及位移,速度,液压力等,以及相同物理量在数量级上的差别,需要对位移、速度、液压力等不同物理量分别单独训练,对同一物理量过大数量级和过小数量级数据分别单独训练,并生成每个物理量的动态降阶模型。
88.5.1、机电液系统数字孪生模型封装
89.采用twinbuilder软件(一种数字孪生完整模型构建软件)进行抬升系统数字孪生完整模型搭建。抬升系统降阶模型的响应数字孪生模型中的速度和流量响应,是通过在位移输出结果的基础上建立modelica函数实现的。速度输出是位移响应对时间的微分,流量输出是在速度输出的基础上增加液压管路面积增益。图19和图20分别为建立抬升系统速度响应和建立抬升系统流量响应的示意图。图21为抬升系统数字孪生模型封装设置的示意图;图22为抬升系统数字孪生模型封装的示意图;图23为抬升系统数字孪生模型编译1的示意图;图24为抬升系统数字孪生模型编译2的示意图;图25为抬升系统twin模型输出1的示意图;图26为抬升系统twin模型输出2的示意图;图27为抬升系统twin模型输出3的示意图;图28为抬升系统twin模型输出4的示意图;图29为倒竖系统twin模型的示意图;图30为举升系统twin模型的示意图。
90.综上完成了抬升系统、倒竖系统和举升系统twin文件的生成。
91.5.2、机电液系统可执行sdk文件集成调试
92.采用twin deployer2021r1软件,导入生成的抬升系统twin文件,搭建其数字孪生模型,并运行测试,最后输出可执行sdk文件夹,可实现机电液系统计算结果的即时响应,具体的过程如下:
93.twin deployer导入抬升系统twin文件,如图31所示;
94.在twin deployer中进行仿真计算,如图32所示;
95.在twin deployer进行sdk文件夹输出设置,如图33所示;
96.所输出的抬升系统可执行sdk文件夹,如图34所示所示;
97.在资源管理器窗口路径处,输入cmd,进入dos界面,输入run_windows.bat命令,sdk文件开始执行,其执行时间和运行曲线结果如图35所示。图中显示的时间为抬升系统sdk执行3500个数据点所花费的时间。
98.抬升系统可执行sdk文件生成的结果曲线图如图36所示。
99.同样的方法,完成倒竖系统和举升系统可执行程序sdk的建立。各自运行时间及运行结果曲线具体为:倒竖系统sdk文件夹执行时间如图37所示;倒竖系统sdk文件夹执行结果如图38所示;举升系统sdk文件夹执行时间如图39所示;举升系统sdk文件夹执行结果如图40所示。
100.机电液系统的数字孪生模型结果数据为csv格式,由数字孪生平台完成仿真结果的接收与开发,最终用于系统数字孪生仿真结果的展示。
101.本实施例构建的机电液系统数字孪生模型旨在依据机电液物理样机、机电液数据采集系统建立机电液数字仿真模型实现雷达架撤系统可视化仿真的实时更新,从而提高雷达架撤系统的可靠性及机动性能;机电液系统采集的数据可直接驱动机电液数字孪生模型,部分数据也可用于仿真模型修正校核,从而得到准确的实时数字仿真模型,实现仿真数
据与物理样机实测数据的等效性;通过充分运行机电液数字孪生模型,全面分析系统的各种性能,特别是恶劣环境、极限状态、加工误差等条件下的系统性能,验证机电液系统性能和系统冗余度,避免实际系统运行可能的发生风险;通过精确数字孪生虚拟测试,实现试验流程核签,多算法混合、高性能并行运算,降低测试与分析成本,缩短测试与分析时间。
102.本实施例在需要构建机电液系统数字孪生模型的场合具有广泛的应用前景。
103.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1