一种基于图像边缘的混凝土表面粗糙度的检测方法
1.本发明属于图像处理技术领域,具体地说是一种基于图像边缘的混凝土表面粗糙度的检测方法。
背景技术:
2.浇注不同龄期的混凝土,以此来新建、修复或改造混凝土结构,需要混凝土铸件之间有足够的粘结。不同铸件之间的粘结强度归因于表面粗糙度。表面粗糙度可以通过多种方式实现,例如喷砂、拉毛、印花等。目前,对于混凝土表面粗糙度常见的检测方法有灌砂法、机械探针法、轮廓纹理仪法等。面对成千上万的混凝土待测试块,这些传统的检测混凝土表面粗糙的方法十分的费时,操作较为复杂,操作设备不易便携,检测成本昂贵。
技术实现要素:
3.本发明所要解决的技术问题就是提供一种基于图像边缘的混凝土表面粗糙度的检测方法,能够在便携的手机设备下,简单高效进行检测,并到达较高的精度。
4.本发明采用如下技术方案:
5.一种基于图像边缘的混凝土表面粗糙度的检测方法,包括以下步骤:
6.步骤1:图像采集
7.对已知混凝土粗糙度数值的样块表面进行图像采集,粗糙度数值由三维激光扫描仪检测所得;
8.步骤2:彩色图像预处理
9.对彩色图像进行预处理,对图像因光照的不均匀引起的亮度不均匀和图像不清晰问题进行校正;
10.步骤3:彩色图像灰度化
11.对预处理后的彩色图像,通过计算每一个像素r、g和b分量的加权和,将像素rgb值转换为灰度值,得到灰度图像;
12.步骤4:灰度图像处理
13.对灰度图像进行均值滤波,得到滤波后的图像,利用某像素点周边像素的平均值来实现平滑噪声的效果;其次,对所有像素值最低的1%和最高的1%进行饱和处理,从而提高输出图像的对比度;
14.步骤5:像素级和亚像素级边缘检测
15.对步骤4处理后的灰度图像,分别采用canny算子实现像素级边缘检测,用zernike矩实现亚像素级边缘检测,分别得到像素级和亚像素级的边缘图像;
16.步骤6:边缘图像逻辑或运算
17.对canny边缘检测和亚像素级zernike边缘检测出的边缘图像进行逻辑或运算;
18.步骤7:计算边缘频率
19.定义对逻辑或运算后的新图像中,白色边缘像素点数与总像素的比值为边缘频
率,假设图像分辨率为x*y,则边缘频率ef为:
[0020][0021]
其中,n(1)为白色像素,n(0)为黑色像素;
[0022]
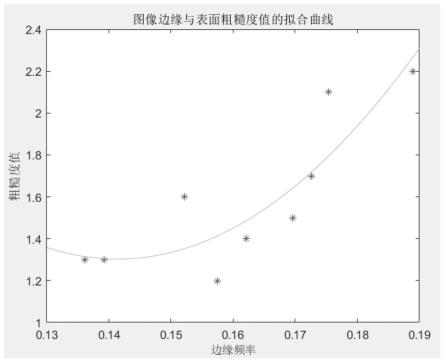
步骤8:采用最小二乘法拟合边缘频率和粗糙度曲线
[0023]
基于对所有采集到的已知表面粗糙度的混凝土图像的粗糙度数据以及计算得到的相应边缘频率数据,采用最小二乘法拟合出边缘频率和粗糙度曲线;
[0024]
进一步对于未知粗糙度的混凝土图像,只需要重复上述步骤2至步骤7,计算出边缘频率,那么基于曲线就获得其相应的粗糙度数值。
[0025]
本发明中,步骤2中,对彩色图像预处理的方法如下:
[0026]
首先,通过亮通双边滤波提取光照变量,将rgb三通道彩色图像转换为hsv通道,并从v通道估计出光照分量;
[0027]
再构造一种二维gama伽马函数,利用光照分布特性调整二维伽马函数的参数,降低光照过强区域的亮度值,提高光照过暗区域图像的亮度值,实现对光照不均匀图像的自适应校正。
[0028]
和现有技术相比,本发明的有益效果在于:
[0029]
本发明能够在便携的手机设备下,通过图像处理的方法对光照不均匀的图像自适应的校正,利用两级边缘检测并做逻辑或运算,得到更加完整的图像的边缘,并提出一个新的与粗糙度相对应的边缘频率来进行简单高效的检测。通过有限已知粗糙度的混凝土表面图像来预测更多未知的混凝土表面粗糙度,并有较高的检测精度。
附图说明
[0030]
图1是本发明的原混凝土粗糙度面采集图像。
[0031]
图2是本发明对原始彩色图像进行预处理后图像。
[0032]
图3是本发明采用canny检测边缘后的图像。
[0033]
图4是本发明采用zernike矩检测边缘后的图像。
[0034]
图5是本发明对canny和zernike矩做逻辑或运算后的图像。
[0035]
图6是本发明拟合出的边缘频率与粗糙度的曲线。
[0036]
图7是本发明图像检测值与实际值的偏差图。
[0037]
图8是基于canny边缘检测值与实际值的偏差图。
[0038]
图9是基于zernike亚像素边缘检测值与实际值的偏差图。
具体实施方式
[0039]
下面结合附图和实施例对本发明作进一步说明,但不应以此限制本发明的保护范围。
[0040]
本发明中,提供一种基于图像边缘的混凝土表面粗糙度的检测方法,该方法包括以下步骤:
[0041]
步骤1:图像采集
[0042]
利用1200万像素以上的安卓智能手机,对已知混凝土粗糙度数值的样块表面进行
图像采集,所述粗糙度数值由三维激光扫描仪检测所得。
[0043]
步骤2:彩色图像预处理
[0044]
由于光源不均匀的照射在粗糙面上,为了获取光照均匀的图像。首先,通过亮通双边滤波提取光照变量,将rgb三通道彩色图像转换为hsv通道,并从v通道估计出光照分量g(i):
[0045][0046][0047][0048][0049]
其中,f(i)表示在i像素位置的v通道,空间核ω(i)是高斯的,是单边高斯,θ、σ为各自的标准差,ω范围是[-ω,+ω]2。
[0050]
再构造一种二维gama伽马函数,利用光照分布特性调整二维伽马函数的参数,降低光照过强区域的亮度值,提高光照过暗区域图像的亮度值,实现对光照不均匀图像的自适应校正;
[0051][0052][0053]
其中,f(i)为输入rgb图像,g(i)为光照分量,为光照分量的亮度均值,二维伽马函数o(i)通过调节增强指数γ实现光照的不均匀校正。
[0054]
步骤3:彩色图像灰度化
[0055]
对处理后的彩色图像,通过计算每一个像素r、g和b分量的加权和,将像素rgb值转换为灰度值,得到灰度图像:
[0056]
gray=0.2989*r+0.5870*g+0.1140*b
[0057]
步骤4:灰度图像处理
[0058]
对灰度图像进行3*3的均值滤波,得到滤波后的图像u(x,y),利用某像素点周边像素的平均值来实现平滑噪声的效果;其次,对所有像素值最低的1%和最高的1%进行饱和处理,将小于255*0.01的灰度值设置为0,将大于255*0.99的灰度值设置为255,从而提高输出图像的对比度;
[0059][0060]
其中,p(s,t)表示灰度图像,s
xy
表示中心点在(x,y)处,大小为3*3的滤波窗口,u
(x,y)表示均值滤波后得到的图像;
[0061]
步骤5:像素级和亚像素级边缘检测
[0062]
像素级canny算子边缘检测:
[0063]
①
高斯滤波器平滑图像
[0064]
二维高斯核与灰度处理后的图像进行卷积,二维高斯函数g(x,y):
[0065][0066]
②
sobel算子计算像素梯度
[0067][0068][0069][0070][0071]
其中,s
x
和sy为3*3的sobel算子,i为灰度图像矩阵,g
x
和gy分别为x方向和y方向的梯度矩阵,m(x,y)为梯度幅值矩阵,α(x,y)为梯度角度图像。
[0072]
③
非极大值像素梯度抑制
[0073]
将梯度幅值矩阵m(x,y)内的每一个点都作为中心像素点,首先找出最接近α(x,y)的方向dk。若m(x,y)沿dk方向大于其邻近的两个像素值,则令gn(x,y)=m(x,y),否则gn(x,y)=0,此时gn(x,y)即为非极大抑制图。
[0074]
④
双阈值检测确定真实边缘位置边缘
[0075]
设置高阈值为th,低阈值为t
l
,双阈值处理视为两幅阈值图像的叠加:
[0076]gnh
(x,y)=gn(x,y)≥th[0077]gnl
(x,y)=gn(x,y)≥t
l
[0078]
其中,g
nh
(x,y)为非极大值图像中,幅值大于高阈值的图像;g
nl
(x,y)为非极大值图像中,幅值大于低阈值的图像。且g
nl
(x,y)中包含着g
nh
(x,y)中所有非零的像素。通过公式,从g
nl
(x,y)中删除所有来着g
nh
(x,y)的非零像素点。
[0079]gnl
(x,y)=g
nl
(x,y)-g
nh
(x,y)
[0080]
亚像素级zernike矩(泽尼克)边缘检测:
[0081]
基于zernike矩的亚像素边缘定位原理是通过定义的三个不同阶次zernike矩a00,a11,a20计算出模型的4个参数,背景灰度h,阶跃灰度k,中心到边缘的垂直距离l,边缘的垂直线与x轴之间的角度然后将这些参数与设定的阈值进行比较,从而准确定位图像的边缘;连续图像的f(x,y)的m阶n次泽尼克矩定义为:
[0082]
[0083]
其中,为积分核函数;
[0084]
旋转图像后,图像关于x轴对称:
[0085][0086][0087]
其中,f’(x,y)为旋转后的图像。
[0088]
旋转的角度φ可由公式计算得:
[0089][0090]
旋转不变性是泽尼克矩的重要性质,旋转φ后图像的泽尼克矩为:
[0091][0092][0093][0094]
则可以计算出l,k,h,那么亚像素的边缘位置为:
[0095][0096]
其中(x,y)为像素级位置。
[0097]
考虑到模板效应,在实际亚像素的计算中会产生偏差,假设模板为m*m,则亚像素坐标公式修改为:
[0098][0099]
步骤6:边缘图像逻辑或运算
[0100]
canny检测的边缘图像为c,zernike检测的边缘图像为z,对c和z进行逻辑或运算。
[0101]
q=c|z
[0102]
其中,q为逻辑或运算后产生的新图像;
[0103]
步骤7:计算边缘频率
[0104]
定义图像中白色边缘像素点数与图像总像素的比值为边缘频率,假设图像分辨率为x*y,则边缘频率ef为:
[0105][0106]
其中,n(1)为白色像素,n(0)为黑色像素。
[0107]
步骤8:最小二乘法拟合边缘频率和粗糙度曲线
[0108]
最小二乘法通过最小化误差平方和来寻找数据的最佳匹配,对于给定的k组观测
[0109]
数据(xi,yi)(k=1,2,
…
k),求解目标函数:
[0110][0111]
其中,x=[xi,xi,
…
xi]
t
为计算得到的边缘频率ef,ω=[ω1,ω2,
…
ωi]
t
为待定参数,y=h(x,w)为由三维激光扫描仪检测得到的粗糙度值。
[0112]
在对所有采集到的已知表面粗糙度的混凝土图像计算边缘频率,完成曲线拟合后,对于未知粗糙度的混凝土图像,只需要重复上述步骤1至步骤7,计算出边缘频率,那么曲线中会有一粗糙度值与之对应。
[0113]
具体实施例中,采用上述检测方法对混凝土表面粗糙度进行检测:
[0114]
首先,按照步骤1,利用1200万像素以上的安卓智能手机,对已知混凝土粗糙度数值的样块表面进行图像采集,共采集9张图片。其中一幅图像如图1所示,粗糙度数值由三维激光扫描仪检测所得为2.1999。
[0115]
接着,按步骤2对彩色图像预处理,通过亮通双边滤波提取光照分量,并使用伽马函数对图像进行自适应的光照不均匀校正,如图2所示。
[0116]
接着,按步骤3和4,对彩色图像灰度化,并对灰度图像处理。彩色图像中信息量过大,通过灰度化来减少图像处理的复杂程度。
[0117]
接着,按步骤5,对灰度图像采取像素级的canny边缘检测和亚像素级zernike边缘检测。像素级和亚像素级的检测边缘图,如图3和4所示。
[0118]
然后,按步骤6,对canny边缘检测和亚像素级zernike边缘检测出的边缘图像进行逻辑或运算,如图5所示;
[0119]
按照步骤7,对逻辑或运算后的新图像计算边缘频率。
[0120]
最后,按照步骤8,采用最小二乘法拟合边缘频率和粗糙度曲线,拟合出的曲线如图6所示。
[0121]
在对所有采集到的已知表面粗糙度的混凝土图像计算边缘频率,完成曲线拟合后,对于未知粗糙度的混凝土图像,只需要重复上述步骤1至步骤7,计算出边缘频率,那么曲线中会有一粗糙度值与之对应。拍摄6张未知图像,通过计算边缘频率,找到了对应的粗糙度值,通过对比实际的粗糙度值如图7,检测精度均在94.7%以上。其中,步骤6如果仅进行canny边缘检测或是zernike矩阵的亚像素边缘检测,会导致许多细节的边缘信息未能提取,导致测量的不准确,其结果如图8和图9所示。结果显示,与单一canny边缘检测计算出的边缘频率,并与粗糙度拟合出关系曲线相比,本文提出的测量方法的精度提高了近30%。同样与基于zernike矩阵的计算边缘频率,拟合出的关系曲线,本文的测量方法精度提高了近7%。
[0122]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1