基于相空间的穿透散射介质目标三维重构方法
1.本发明属于计算成像技术领域,特别涉及穿透散射介质的成像与探测领域,具体涉及穿透散射介质的目标三维重构方法。
背景技术:
2.散射介质广泛存在于自然界中,例如生物组织、雨雾天、火灾烟雾、浑浊深海等,这给医疗诊断、复杂环境驾驶、火灾救援及深海探测等领域带来挑战。散射成像逐渐开始成为国内国际的研究热点,受到广泛关注。散射成像在医学、国家安全、军事与民生应用中具有重要的科学意义和技术价值,如何克服散射影响实现清晰成像依然是限制人类社会活动的重要科学问题。
3.近年来,各种散射成像方法被相继提出。随着光散射理论和实验技术的飞速发展,基于光学传输矩阵的散射成像方法,只要测量出成像系统的光学传输矩阵,便可从任意目标所成的散斑中迅速恢复出待测目标。但是,该方法所需系统较复杂,系统稳定性要求非常高,任何改变都有可能导致无法重建目标。利用散斑相关技术实现非侵入式的透过散射介质成像方法,具有非入侵的特点,且对于光源、介质和系统的要求较低。该方法的缺陷是需要在光学记忆效应范围内进行扫描。基于偏振的散射成像技术很早之前就有人在做研究。该方法需要获取同一场景下不同偏振度的多幅图像估计环境光,从而恢复出清晰图像,但是该方法的稳定性取决于理想天气条件下的光的偏振特性,当天气为阴天或者浓雾时,该方法的处理效果较差,同时这类算法对图像的采集过程要求较高。
技术实现要素:
4.本发明的目的在于,针对现有散射成像技术存在的不足,提供一种对光源要求较低、成像系统简单的基于相空间的穿透散射介质成像方法,可以进行穿透散射介质的目标三维重构。
5.本发明的基于相空间的穿透散射介质目标三维重构方法,包括实际相空间合成、预测相空间的计算和目标稀疏重构三个步骤:
6.(1)实际相空间的合成
7.该过程是将采集到的一组二维图像合成一个四维矩阵的过程,该四维矩阵就是实测的相空间数据。
8.实测的相空间是将相机在不同视点下采集到的一组二维图像合成一个四维矩阵i(r,u);其中,四个维度分别是两个横向的空间坐标r=(x,y),以及两个相机视点坐标u=(u
x
,uy)。
9.将相机放置在不同视点上采集每个视点下的一张图像;一张图像中包含一组二维数据,将所有的二维数据进行组合便得到一组四维数据,即实测的四维相空间数据;其中,四个维度分别是两个横向的空间坐标r=(x,y),以及两个相机视点坐标u=(u
x
,uy),所以整个实测的四维相空间数据记为i(r,u)。
10.(2)预测相空间的计算
11.该过程计算待重构的空间中每一个可能位置处的点光源的相空间预测值,以便于下面实测相空间与预测相空间做差迭代求取重构位置;预测相空间即为通过物理模型计算出的空间中的点光源对应的相空间值,包括以下步骤:
12.①
由空间中点光源的光场分布以及相机图像与真实空间的缩放关系得到空间中点光源在相机拍到的图像上的光强分布。
13.空间中点光源(rs,zs)在相机拍到的图像上的光强分布为:
[0014][0015]
其中:r
′s就是rs的像;
[0016]
a是一个参数,由于传播过程要受到散射的影响,若散射介质为体积散射介质且传播过程全程都有散射介质存在,则a=zsσ,其中zs是传播距离,σ是散射系数;若散射介质为单层散射介质,则a=(z
s-zd)σ,其中zd是单层散射介质到相机的距离;
[0017]
②
利用几何关系得到空间中位于位置(rs,zs)上的点光源的相空间模型;
[0018]
若散射介质为体积散射介质且传播过程中都有散射存在,则相空间模型为:
[0019][0020]
若散射介质为单层散射介质,则相空间模型为:
[0021][0022]
其中zd是单层散射介质到相机的距离。
[0023]
③
如果三维空间中存在多个点光源,那整体的相空间就由空间中所有点光源的线性叠加得到,即:整体的相空间就是单个点光源相空间函数的集合;其中单个点光源的相空间函数a(r,u;rs,zs)是由三维位置(rs,zs)参数化的(r,u)的四维相空间函数;所以,分解后的加权和为相空间的预测值;
[0024]
得到的整体的相空间预测值为:
[0025][0026]
其中c(rs,zs)为描述点源在位置(rs,zs)处辐射功率的非负系数。
[0027]
(3)目标的稀疏三维重构:
[0028]
上面两步分别得到了预测的相空间模型以及实测的相空间数据,最后通过迭代优化找到使预测数据(预测的相空间)与实测数据(实测的四维相空间数据)之差最小的稀疏分布c(rs,zs),即需要求解以下优化问题:
[0029][0030]
其中,μ是正则化常数,i(r,u)是实测相空间;这里的和是所有可能的源位置的连续参数空间,将候选位置集离散化,经过离散化后,非光滑凸面优化问题简化为“l1-最小化问题”;进行迭代求解该最小化问题(如使用twist算法),最终恢复出原物体的三维位置或者原物体的形状,完成重构。
[0031]
本发明基于相空间实现穿透散射介质的目标三维重构,通过从多个不同视点进行图像采集,以获得来自目标物体不同方向的光信息。相比于传统的穿透散射介质成像系统,成像系统更加简单,只需要一个相机并配合移动装置,并且既适用于相干光源也适用于非相干光源,具有较强的普适性。另外,该方法能进行三维空间的重构。
[0032]
本发明具有以下特点:
[0033]
(1)能够实现穿透散射介质的目标三维重构;
[0034]
(2)对光源要求较低,既适用于相干光源也适用于非相干光源,具有较强的普适性;
[0035]
(3)成像系统非常简单,只需要一个相机并配合移动装置。
附图说明
[0036]
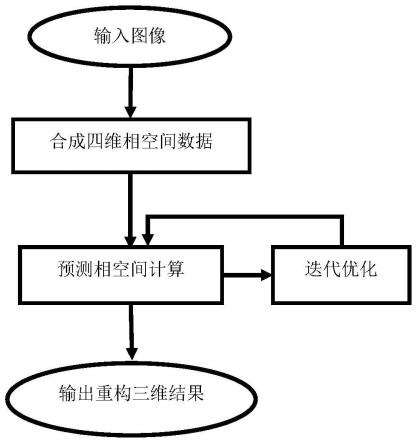
图1是本发明基于相空间的穿透散射介质目标三维重构方法的整体流程图。
[0037]
图2是本发明中的光路几何关系图。
具体实施方式
[0038]
图1给出了本发明基于相空间的穿透散射介质目标三维重构方法的整体流程图,包含实际相空间合成、预测相空间的计算和迭代算法求取使预测数据和实测数据之差最小的稀疏分布的流程图。整个过程从采集到的数据,实际相空间合成,预测相空间计算,迭代优化求解,便得到重构出来的三维结果。
[0039]
一.实际相空间合成
[0040]
在实际场景中,本发明将带有镜头的相机放置在空间中不同视点下采集图像,通过移动相机的位置来进行多个视点的图像采集,以获取不同方向的光信息。相机每移动一次就捕获一张光强图,相机每次移动位置之间的间隔距离保持一致,便于对空间中视点方向进行表示。
[0041]
一张图像中包含一组二维数据,将所有的二维数据按照视点坐标进行组合便得到一组四维数据,即实测的四维相空间数据。其中,四个维度分别是两个横向的空间坐标r=(x,y),以及两个相机视点坐标u=(u
x
,uy),所以整个实测的四维相空间数据可以记为i(r,u)。
[0042]
二.预测相空间计算
[0043]
(1)对于空间中任意位置(rs,zs)的点光源,其在空间中的光强分布为:
[0044][0045]
其中,rs=(xs,ys)表示点光源在空间中的横向坐标值。
[0046]
(2)上面是点光源在空间中的光强分布情况。而相机拍摄到的照片就是对真实空间的一个缩放。空间中任意点光源在相机上的光强分布为:
[0047][0048]
其中,r
′s就是rs的像;a是一个参数,下面会做具体说明。
[0049]
(3)利用图2给出的光路几何关系,将r
′s代换掉得到空间中位于位置(rs,zs)上的
点光源的相空间模型为:
[0050][0051]
(4)加入散射影响后空间中点光源的相空间模型
[0052]
散射与粒子散射强度σ以及传播距离z
l
有关:
[0053]
①
对于体积散射介质的情况:
[0054]
体积散射介质,即:光在一定的体积范围内受散射影响。若光从物体到相机传播过程中一直都有散射介质存在,则这个过程一直在受散射。所以z
l
=zs,则:a=zsσ。因此散射模型建模为:
[0055][0056]
②
对于毛玻璃等的单层散射介质的情况:
[0057]
光传播过程中,在毛玻璃之前不受散射作用,只有经过毛玻璃之后才受散射的作用。因此,z
l
等于目标物体到散射介质的距离,则:a=(z
s-zd)σ,其中zd是散射介质到相机的距离。所以散射的物理模型为:
[0058][0059]
接下来的流程对于体积散射介质和单层散射介质完全相同,将以单层散射介质情况继续说明。
[0060]
(5)如果三维空间中存在多个点光源,每个点光源都有自己的相空间函数。那么,此时整体的相空间就由空间中所有点光源线性叠加得到,即:整体的相空间就是单个点光源相空间函数的集合,将其表示为:
[0061][0062]
其中原子a(r,u;rs,zs)是由三维位置(rs,zs)参数化的(r,u)的四维相空间函数。将其分解后的加权和就是计算相空间预测值的函数:
[0063][0064]
其中c(rs,zs)为描述点源在位置(rs,zs)处辐射功率的非负系数。
[0065]
三.迭代算法求取使预测数据和实测数据之差最小的稀疏分布:
[0066]
上面几个步骤分别得到了预测的相空间模型以及实测的相空间数据,要求得重构后的值,则需要借助迭代算法来找到使预测数据与实测数据之差最小的稀疏分布c(rs,zs),即需要求解以下优化问题:
[0067][0068]
其中μ是正则化常数,i(r,u)是实测的相空间。这里的和是所有可能的源位置的连续参数空间。将候选位置集离散化,经过离散化后,非光滑凸面优化问题简化为“l1-最小化
问题”。该类问题目前有许多迭代算法,这里使用的是twist算法进行迭代求解,最终恢复出原灯的三维位置或者原物体的形状,完成重构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1