一种农作物遥感分类方法及系统与流程
1.本发明属于图像分类技术领域,尤其涉及一种农作物遥感分类方法及系统。
背景技术:
2.农作物播种面积是国家统计数据的重要内容,农作物遥感分类有助于宏观上了解区域内不同作物的种植情况,是其它农业遥感应用的基础和前提,对于优化作物种植结构和耕地资源配置具有重要作用。
3.目前已有的方法包括一种融合多源地理信息数据的农作物分类方法(cn2021114869135)、一种面向农作物分类的时间序列特征重建及动态识别方法(cn2021103990041)、基于时空深度学习融合技术的农作物全自动化分类方法(cn2021102795643)。以下逐一进行说明:
4.cn2021114869135:获取目标区域中农作物生产周期范围内的多景多时相卫星影像数据,对卫星影像数据进行预处理的操作;对卫星影像数据进行多维特征因子的提取,特征因子包括:光谱、纹理和植被指数;对各个特征因子进行不同组合下的多通道数据融合,将不同组合的多通道融合数据结合地面真实样本训练支持向量机分类器,基于训练完成的支持向量机分类器得到农作物分类初始结果。该方法需要地面真实样本的支持,而获取地面真实样本的过程很费时费力。
5.cn2021103990041::步骤1:初始样本数据集构建;步骤2:缺失数据区域预测填充;步骤3:缺失数据区域取值范围取值填充;步骤4:回归器与分类器迭代;步骤5:动态分类;重复步骤2至步骤4,进行第r+1维特征回归器与分类器的构建,直到完成对所有r维特征的回归器与分类器的建立;实现数据缺失部分的重建和农作物分类,完成农作物的动态识别。该方法同样需要地面实测样本数据的支持,自动化程度不够,满足不了大范围农作物遥感分类的需求。
6.cn2021102795643:融合地理信息的geo-3d cnn网络与geo-conv1d网络,并采用active learning策略实现两种分类方法分类结果的融合。该方法没有考虑云和阴影对分类结果的影响,而云和阴影是光学遥感影像普遍存在的问题。
技术实现要素:
7.本发明解决的技术问题是:克服现有技术的不足,提供了一种农作物遥感分类方法及系统,排除了光学遥感影像固有的云和阴影的干扰和影响,获得了精度可靠并且可解释的分类结果。
8.本发明目的通过以下技术方案予以实现:一种农作物遥感分类方法,包括:步骤s100:获取目标区的时间序列遥感影像,进行预处理得到多时相的遥感影像;其中,时间序列的时相数为n;步骤s200:对每个时相的遥感影像进行云和阴影的检测,得到时间序列的云和阴影掩膜二值图;步骤s300:对每个时相的遥感影像进行植被提取,得到时间序列的植被分布二值图;步骤s400:从时间序列的云和阴影掩膜二值图中计算得出所有时相均无云
和阴影的区域,记为aoi区域;根据时间序列的植被分布二值图对目标区的时间序列遥感影像落在aoi区域的所有像元进行多时相植被合成得到多时相植被类型;步骤s500:计算每种多时相植被类型所占的aoi区域的面积百分比,若该百分比小于设定阈值t时,则判定为无效类型;否则为有效类型;步骤s600:对于每一种有效类型,计算该有效类型对应的多时相遥感影像落在aoi区域内的平均光谱,作为该有效类型的多时相特征光谱,构成监督分类光谱库;步骤s700:使用监督分类光谱库对aoi区域以外的区域以及aoi区域内的无效类型区域进行逐像元的选择性监督分类得到待分类光谱矢量v1和特征光谱矢量集合;步骤s800:计算待分类光谱矢量v1和特征光谱矢量集合中的每条特征光谱之间的欧氏距离,取欧氏距离最小的特征光谱所在的有效类型作为待分类像元的有效类型。
9.上述农作物遥感分类方法中,还包括:步骤s900:在预先知道目标区不同作物的播种期和收获期的基础上,结合多时相的遥感影像的采集日期,将不同的有效类型指定为不同的农作物类型;步骤s1000:建立目标区的有效类型和农作物类型之间的映射查找表。
10.上述农作物遥感分类方法中,在步骤s400中,多时相植被类型通过如下公式得到:
[0011][0012]
其中,c为多时相植被类型,pi为第i时相的植被分布二值图,n为时间序列的时相数,i为时相的序号。
[0013]
上述农作物遥感分类方法中,多时相植被类型的种类数量为:n=2n。
[0014]
上述农作物遥感分类方法中,在步骤s500中,有效类型的数量为:ne≤n;其中,ne为有效类型的数量,n为多时相植被类型的种类数量。
[0015]
上述农作物遥感分类方法中,在步骤s600中,监督分类光谱库中的每一条特征光谱具有b*n个特征,并具有一个类型标签c;其中,b为单一时相遥感图像的波段数量。
[0016]
上述农作物遥感分类方法中,在步骤s700中,使用监督分类光谱库对aoi区域以外的区域以及aoi区域内的无效类型区域进行逐像元的选择性监督分类得到待分类光谱矢量v1和特征光谱矢量集合包括如下步骤:对于某个待分类像元,首先从时间序列的云和阴影掩膜二值图中获取待分类像元的无云和阴影的时相,继而从多时相的遥感影像中抽取无云和阴影时相的待分类像元的光谱反射率值,构成待分类光谱矢量v1;对于每一种有效类型,从光谱库中提取待分类像元的对应的无云和阴影时相的特征光谱矢量集合。
[0017]
上述农作物遥感分类方法中,所述特征光谱矢量集合包括ne条特征光谱。
[0018]
上述农作物遥感分类方法中,在步骤s900中,农作物在播种前至播种后一个月之内均为非植被,播种后一个月至收获前均为植被,收获后均为非植被。
[0019]
一种农作物遥感分类系统,包括:第一模块,用于获取目标区的时间序列遥感影像,进行预处理得到多时相的遥感影像;其中,时间序列的时相数为n;第二模块,用于对每个时相的遥感影像进行云和阴影的检测,得到时间序列的云和阴影掩膜二值图;第三模块,用于对每个时相的遥感影像进行植被提取,得到时间序列的植被分布二值图;第四模块,用于从时间序列的云和阴影掩膜二值图中计算得出所有时相均无云和阴影的区域,记为aoi区域;根据时间序列的植被分布二值图对目标区的时间序列遥感影像落在aoi区域的所有像元进行多时相植被合成得到多时相植被类型;第五模块,用于计算每种多时相植被类型
所占的aoi区域的面积百分比,若该百分比小于设定阈值t时,则判定为无效类型;否则为有效类型;第六模块,用于对于每一种有效类型,计算该有效类型对应的多时相遥感影像落在aoi区域内的平均光谱,作为该有效类型的多时相特征光谱,构成监督分类光谱库;第七模块,用于使用监督分类光谱库对aoi区域以外的区域以及aoi区域内的无效类型区域进行逐像元的选择性监督分类得到待分类光谱矢量v1和特征光谱矢量集合;第八模块,用于计算待分类光谱矢量v1和特征光谱矢量集合中的每条特征光谱之间的欧氏距离,取欧氏距离最小的特征光谱所在的有效类型作为待分类像元的有效类型。
[0020]
本发明与现有技术相比具有如下有益效果:
[0021]
(1)本发明抓住了农作物在播种前后、生长期和收割后光谱特征差别最明显的主要矛盾,通过化繁为简再由简入繁,大大简化了农作物遥感分类的工作流程;
[0022]
(2)本发明只需要先验的专家知识而不需要地面实测的样方即可进行农作物分类,可节省大量的人力物力。该方法普适性更强,且不受云和阴影的影响,自动化程度较高。
附图说明
[0023]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0024]
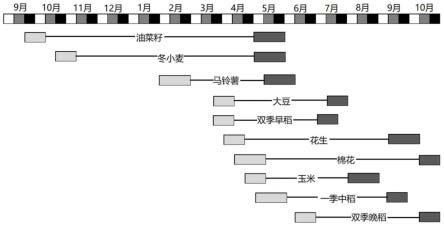
图1是本发明实施例提供的目标区不同农作物的播种期和收获期示意图;
[0025]
图2(a)是本发明实施例提供的2020年11月08日的遥感影像示意图;
[0026]
图2(b)是本发明实施例提供的2021年02月21日的遥感影像示意图;
[0027]
图2(c)是本发明实施例提供的2021年05月02日的遥感影像示意图;
[0028]
图2(d)是本发明实施例提供的2021年06月06日的遥感影像示意图;
[0029]
图2(e)是本发明实施例提供的2021年07月26日的遥感影像示意图;
[0030]
图2(f)是本发明实施例提供的2021年09月14日的遥感影像示意图;
[0031]
图3(a)是本发明实施例提供的2021年05月02日的云和阴影掩膜图;
[0032]
图3(b)是本发明实施例提供的2021年07月26日的云和阴影掩膜图;
[0033]
图3(c)是本发明实施例提供的aoi区域的示意图;
[0034]
图4(a)是本发明实施例提供的2020年11月08日的植被分布图;
[0035]
图4(b)是本发明实施例提供的2021年02月21日的植被分布图;
[0036]
图4(c)是本发明实施例提供的2021年05月02日的植被分布图;
[0037]
图4(d)是本发明实施例提供的2021年06月06日的植被分布图;
[0038]
图4(e)是本发明实施例提供的2021年07月26日的植被分布图;
[0039]
图4(f)是本发明实施例提供的2021年09月14日的植被分布图;
[0040]
图5是本发明实施例提供的目标区的农作物分布示意图。
具体实施方式
[0041]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围
完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
[0042]
本实施例提供了一种农作物遥感分类方法,该方法包括如下步骤:
[0043]
步骤s100:获取目标区的时间序列遥感影像,进行预处理得到多时相的遥感影像,使其几何、辐射特性满足应用需求,设时间序列的时相数为n;
[0044]
步骤s200:对每个时相的遥感影像进行云和阴影的检测,得到时间序列的云和阴影掩膜二值图;
[0045]
步骤s300:对每个时相的遥感影像进行植被提取,得到时间序列的植被分布二值图;
[0046]
步骤s400:从时间序列的云和阴影掩膜二值图中计算得出所有时相均无云和阴影的区域,记为aoi(area of intact)区域;根据时间序列的植被分布二值图对目标区的时间序列遥感影像落在aoi区域的所有像元进行多时相植被合成得到多时相植被类型,具体为执行以下波段运算:
[0047][0048]
其中c为多时相植被类型,pi为第i时相的植被分布二值图,共可得到n=2n种类型。
[0049]
步骤s500:计算每种多时相植被类型所占的aoi区域的面积百分比,若该百分比小于设定阈值t时,则判定为无效类型。经此筛选后,余下的类型为有效类型(数量为ne《=n);
[0050]
步骤s600:对于每一种有效类型,计算该有效类型对应的多时相遥感影像落在aoi区域内的平均光谱,作为该有效类型的多时相特征光谱,构成监督分类光谱库。该光谱库中的每一条特征光谱具有b*n个特征,并具有一个类型标签c,其中b为单一时相遥感图像的波段数量。
[0051]
步骤s700:使用以上光谱库对aoi区域以外的区域以及aoi区域内的无效类型区域进行逐像元的选择性监督分类,分类过程如下:对于某个待分类像元,首先从时间序列的云和阴影掩膜二值图中获取待分类像元的无云和阴影的时相,继而从多时相的遥感影像中抽取无云和阴影时相的待分类像元的光谱反射率值,构成待分类光谱矢量v1;另一方面,对于每一种有效类型,从光谱库中提取待分类像元的对应的无云和阴影时相的特征光谱矢量集合v2;其中,特征光谱矢量集合包括ne条特征光谱。
[0052]
步骤s800:计算待分类光谱矢量v1和特征光谱矢量集合中的每条特征光谱之间的欧氏距离,取欧氏距离最小的特征光谱所在的有效类型作为待分类像元的有效类型。
[0053]
步骤s900:因为农作物在播种前至播种后一个月之内均为非植被,播种后一个月至收获前均为植被,收获后均为非植被,在预先知道目标区不同作物的播种期和收获期的基础上,结合多时相遥感影像的采集日期,可以将不同的多时相有效类型指定为不同的农作物类型。
[0054]
步骤s1000:建立目标区多时相有效类型和农作物类型之间的映射查找表,供将来继续使用,实现全自动的农作物遥感分类。
[0055]
具体的,以完整覆盖湖北省孝感市孝南区、孝昌县、云梦县、安陆市和应城市5个县市区的哨兵时序影像为例,阐述本发明的具体实施步骤。
[0056]
通过查询湖北省2020年统计年鉴得知,种植面积占总播种面积1%以上的农作物
包括水稻、冬小麦、玉米、大豆和马铃薯五种粮食作物,以及油菜籽、花生和棉花三种经济作物;通过查询网上信息和咨询当地种植经验丰富的农户,获得以上8种农作物的播种期和收获期信息,作为先验的专家知识,如附图1所示。
[0057]
从欧空局网站(网址:https://scihub.copernicus.eu/dhus/#/home)下载哨兵二号的l2a级数据产品,该级别产品已经过严格的大气校正和几何精校正,可直接用于农作物分类。表示地理位置的产品分块标识为t49rgq,影像拍摄日期分别为:2020-11-08;2021-02-21;2021-05-02;2021-06-06;2021-07-26;2021-09-14,构成涵盖2021年收获的所有农作物生长季的时间序列遥感影像,如图2(a)、图2(b)、图2(c)、图2(d)、图2(e)和图2(f)所示。为保证分类精度,本实施例仅使用10米分辨率的红、绿、蓝和近红外4个波段。
[0058]
制作每一幅遥感影像的云和阴影掩膜二值图。具体实施方式为:求取所有波段的最小值,当最小值》t1时,即判定为云覆盖区域。阈值t1尽量设置小一些,以尽可能囊括所有的云覆盖区域;求取所有波段的最大值,当最大值《t2时,即判定为阴影区域。阈值t2尽量设置大一些,以尽可能囊括所有的阴影区域。在本实施例中,取t1=0.12,t2=0.16,由于只有2021年5月2日和2021年7月26日的影像有云覆盖,因此只需要对这两个时相进行云和阴影的检测。其中云和阴影区为0,非云和阴影区为1,如图3(a)和图3(b)所示。云检测的结果会把一些高亮的建筑物或道路判定为云,而阴影检测的结果会把一部分水体判定为阴影,但是鲜少有植被像元被判定为云或阴影,因而对本发明的应用目的——农作物分类并没有影响。
[0059]
提取每一幅遥感影像的植被分布二值图。采用光学遥感影像植被和水体信息自动提取方法(cn112131946a),对时序遥感影像进行植被分布的全自动提取,其中植被为2,非植被为1,植被分布提取结果如图4(a)、图4(b)、图4(c)、图4(d)、图4(e)和图4(f)所示。
[0060]
从时间序列的云掩膜二值图中计算得出所有时相均无云和阴影的区域,记为aoi(area of intact),如附图3(c)所示,约占总面积的61.5%;对落在aoi区域的所有像元进行多时相植被合成,具体操作为执行以下波段运算:
[0061]
c=p1*100000+p2*10000+p3*1000+p4*100+p5*10+p6[0062]
其中c为多时相植被类型,共可得到n=26=64种类型。pi为第i时相的植被分布(植被为2,非植被为1)。
[0063]
由于几何配准误差(不可能完全对准),以及全自动植被提取的误差(不可能100%正确),在这64种多时相类型种会包含一些无意义的类型。计算每种类型占总面积的百分比,当该百分比小于设定阈值t时,判定为无效的噪声类型。在本实施例中,t=0.3%。共剔除29种多时相类型,余下的35种被认为是有效类型,其总面积超过aoi区域面积的95%。
[0064]
对于上述35种有效类型,分别计算其多时相遥感影像落在aoi区域内的平均光谱,作为它们的多时相特征光谱,并构成监督分类光谱库。
[0065]
使用上述光谱库对aoi以外的区域以及aoi内的噪声类型区域进行逐像元的选择性监督分类,分类过程如下:对于某个待分类像元,首先从时间序列的云和阴影掩膜二值图中获取其无云和阴影的时相,继而从时间序列的遥感影像中抽取无云和阴影时相的光谱反射率值,构成无云和阴影时相的待分类光谱矢量v1;另一方面,从光谱库中提取相应无云和阴影时相的特征光谱矢量v2。计算v1和v2之间的欧氏距离,作为监督分类的相似性度量,取欧氏距离最小的特征光谱所在的类别作为待分类像元的类别。
[0066]
对照图1的作物播种期和收获期,直接将不同的多时相有效类型指定为不同的农作物类型,共分得非植被、林地、水稻、冬小麦、油菜籽、玉米、大豆、马铃薯、花生棉花9种类别,包括7种农作物类型,如图5所示。其中花生和棉花由于播种期和收获期都过于相似,被分成同一种类型。如果补充一幅10月上旬的植被分布图(此时花生已经完成收获,而棉花尚未收获),则可以进一步将这两种作物区分开来。
[0067]
有了上述农作物遥感分类经验,可建立目标区多时相植被类型和农作物类型之间的映射查找表,以供将来继续使用,实现全自动的农作物遥感分类。该查找表不仅适用于本地,也适用于气候和种植结构相同的一定地理范围。本实施例的查找表如表1所示。
[0068]
表1
[0069]
农作物类型多时相植被类型水稻(3)111121、111122、121121、121122、211121、211122、211212冬小麦(4)122121、122122油菜(5)221121、221122、221221、222121、222122玉米(6)111221、211221大豆(7)111211马铃薯(8)212111、212122花生棉花(9)111222
[0070]
本实施例还提供了一种农作物遥感分类系统,包括:第一模块,用于获取目标区的时间序列遥感影像,进行预处理得到多时相的遥感影像;其中,时间序列的时相数为n;第二模块,用于对每个时相的遥感影像进行云和阴影的检测,得到时间序列的云和阴影掩膜二值图;第三模块,用于对每个时相的遥感影像进行植被提取,得到时间序列的植被分布二值图;第四模块,用于从时间序列的云和阴影掩膜二值图中计算得出所有时相均无云和阴影的区域,记为aoi区域;根据时间序列的植被分布二值图对目标区的时间序列遥感影像落在aoi区域的所有像元进行多时相植被合成得到多时相植被类型;第五模块,用于计算每种多时相植被类型所占的aoi区域的面积百分比,若该百分比小于设定阈值t时,则判定为无效类型;否则为有效类型;第六模块,用于对于每一种有效类型,计算该有效类型对应的多时相遥感影像落在aoi区域内的平均光谱,作为该有效类型的多时相特征光谱,构成监督分类光谱库;第七模块,用于使用监督分类光谱库对aoi区域以外的区域以及aoi区域内的无效类型区域进行逐像元的选择性监督分类得到待分类光谱矢量v1和特征光谱矢量集合;第八模块,用于计算待分类光谱矢量v1和特征光谱矢量集合中的每条特征光谱之间的欧氏距离,取欧氏距离最小的特征光谱所在的有效类型作为待分类像元的有效类型。
[0071]
本发明抓住了农作物在播种前后、生长期和收割后光谱特征差别最明显的主要矛盾,通过化繁为简再由简入繁,大大简化了农作物遥感分类的工作流程;本发明只需要先验的专家知识而不需要地面实测的样方即可进行农作物分类,可节省大量的人力物力。该方法普适性更强,且不受云和阴影的影响,自动化程度较高。
[0072]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案
的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1