一种并行的海洋环境水声特征诊断方法、模块和系统与流程
1.本发明属于物理海洋与海洋环境水声特性融合领域,涉及一种海洋水声特征参数诊断方法、模块和系统。
背景技术:
2.近几十年来,随着核潜艇的服役,各国对水声设备、水声理论、海洋环境等的研究提出了更高的要求。声呐技术取得跨越式发展的重要途径之一,在于对海洋环境水声特性的深入挖掘。因此,研究海洋声速场的分布,了解声速剖面的时、空分布变化规律,掌握声道的分类特征,探索深浅海声道特征量的地理分布状况,对提高反潜、探测能力和建立深海预警体系,有着举足轻重的意义。
3.深海典型声速剖面可分为三层结构:表面等温层、温跃层和深海等温层。深海最大的特点是独有的海洋分层现象及其产生的不同声传播模式,这些声传播模式与声呐的工作原理密切相关。海水表层处声速剖面为正梯度时所形成的声道,称为表层声道。如果声速正梯度一直延伸到海底,则称为半声道。声速极小值所在的深度称声道轴。声道轴分为两类:浅海声道轴和深海声道轴。浅海声道轴发生在主跃层,通常跟锋面和涡旋有关。深海声道轴是深海的一个稳定的特征,位于主跃层之下。水声学的浅海,深度一般为几十米到数百米,其最大特点是没有固定的深海声道。
4.现有技术中还没有关于海洋环境水声特征诊断方法。
技术实现要素:
5.为了探索海洋声道特征量的地理分布状况,掌握声道的分类特征以提高声呐技术,本发明提供了一种并行的海洋环境水声特征诊断方法、模块和系统,该系统将动态海洋模型与海洋环境水声特征诊断方法结合在一起,海洋模型生成水声特征诊断所需要的声速剖面,系统针对全球海域给出各种水声特征参数诊断及预报。
6.系统使用自然资源部海浪-潮流-环流耦合数值模型提供温度、盐度及对应的深度等环境参数,根据这些环境参数计算声速剖面,利用垂直梯度法对声速剖面进行诊断。
7.本发明是通过如下技术方案来实现的:
8.一种并行的海洋环境水声特征诊断方法,具体步骤如下:
9.第一步,利用海洋模型给出全球海域的包括温度、盐度及对应的深度在内的海洋环境参数的预报,根据这些海洋环境参数求取对应网格点的声速剖面,声速剖面利用mackenzie公式求解:
10.c=1448.96+4.591t-5.304
×
10-2
t2+2.374
×
10-4
t3+1.340(s-35)+1.630
×
10-2
d+1.675
×
10-7d2-1.025
×
10-2
t(s-35)-7.139
×
10-13
td3,
11.其中,c为声速剖面,t为温度(℃),s为盐度(
‰
),d为深度(m);
12.第二步,利用梯度函数gradient求取从海面到海底的声速梯度,通过声速梯度正负分析,确定声速梯度正负转变过零点的深度;
13.第三步,分析确定表面声道深度sld并计算表面声道截止频率sfd,判断半声道条件haf,从海表面开始,若初始声速梯度为负时,不存在表面声道深度;若初始声速梯度为正时,查找确认自海面起第一个从正声速梯度转负声速梯度过零点的深度,初步判定该深度为表面声道深度sld,计算表面声道截止频率:若正声速梯度从海面一直延伸到海底,则确认该位置满足半声道条件haf;
14.第四步,分析确定浅海声道轴深度ssx和深海声道轴深度dsc;利用垂直梯度法确认声速剖面所有极小值点深度,即从负声速梯度转正声速梯度过零点的深度,如果仅存在一个声速极小值点,根据极小值点深度z判断其为浅海声道轴深度ssx还是深海声道轴深度dsc;如果存在两个或以上的声速剖面极小值点,首先合并深度间隔在5米以内的极小值点,之后根据浅海声道轴深度和深海声道轴深度的分界线确定浅海声道轴深度ssx和深海声道轴深度dsc。
15.进一步,所述的分界线350m。
16.本发明还提供利用上述方法集成的运算模块。
17.本发明还提供集成有所述运算模块的系统。
18.本发明与现有技术相比的有益效果是:
19.本发明方法将动态海洋模型与水声环境特征诊断方法结合在一起,快速实现水下环境特征诊断并预报,预报参数包括:表面声道深度及截止频率、半声道条件、深海声道轴深度、浅海声道轴深度,这些参数对提高声呐技术和建立深海预警体系,有着举足轻重的意义。
附图说明
20.图1是海洋环境水声特征诊断及预报系统的模块架构图;
21.图2是海洋环境水声特征诊断及预报系统的流程图;
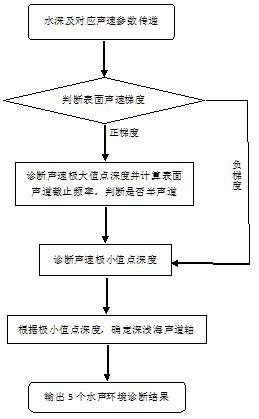
22.图3是水声环境特征参数诊断方法的流程图;
23.图4是声速及声速垂直梯度图;
24.图5是不同声速剖面的特征量展示,包括表面声道、半声道、深海声道轴、浅海声道轴等;
25.图6是全球海域表面声道深度及截止频率诊断结果(2月和8月);
26.图7是全球海域半声道条件诊断结果(2月和8月);
27.图8是全球海域深海声道轴深度诊断结果(2月和8月);
28.图9是全球海域浅海声道轴深度诊断结果(2月和8月)。
具体实施方式
29.下面通过实施例结合附图来对本发明的技术方案做进一步解释,但本发明的保护范围不受实施例任何形式上的限制。
30.实施例1
31.一种并行的海洋环境水声特征诊断方法,具体步骤如下:
32.第一步,利用海洋模型给出全球海域的包括温度、盐度及对应的深度在内的海洋
环境参数的预报,根据这些海洋环境参数求取对应网格点的声速剖面,声速剖面利用mackenzie公式求解:
33.c=1448.96+4.591t-5.304
×
10-2
t2+2.374
×
10-4
t3+1.340(s-35)+1.630
×
10-2
d+1.675
×
10-7d2-1.025
×
10-2
t(s-35)-7.139
×
10-13
td3,
34.其中,c为声速剖面,t为温度(℃),s为盐度(
‰
),d为深度(m);
35.第二步,利用梯度函数gradient求取从海面到海底的声速梯度,通过声速梯度正负分析,确定声速梯度正负转变过零点的深度;
36.第三步,分析确定表面声道深度sld并计算表面声道截止频率sfd,判断半声道条件haf,从海表面开始,若初始声速梯度为负时,不存在表面声道深度;若初始声速梯度为正时,查找确认白海面起第一个从正声速梯度转负声速梯度过零点的深度,初步判定该深度为表面声道深度sld,计算表面声道截止频率:若正声速梯度从海面一直延伸到海底,则确认该位置满足半声道条件haf;
37.第四步,分析确定浅海声道轴深度ssx和深海声道轴深度dsc;利用垂直梯度法确认声速剖面所有极小值点深度,即从负声速梯度转正声速梯度过零点的深度,如果仅存在一个声速极小值点,根据极小值点深度z判断其为浅海声道轴深度ssx还是深海声道轴深度dsc;如果存在两个或以上的声速剖面极小值点,首先合并深度间隔在5米以内的极小值点,之后根据浅海声道轴深度和深海声道轴深度的分界线确定浅海声道轴深度ssx和深海声道轴深度dsc。
38.本实施例所采用的分界线为350m。
39.上述方法采用fortran-90编程语言的模块化实现,整体设计框架如图1所示。整个系统针对地理空间并行化实现,该系统最终可以提供5种参数的预报,分别是表面声道深度及截止频率、半声道条件、深海声道轴深度、浅海声道轴深度。
40.下面所述的海洋模型为海浪-潮流-环流耦合数值模型自然资源部第一海洋研究所研发,在“海洋动力系统数值模式体系及海浪-环流耦合理论”《前沿科学》2007.3。
41.系统执行过程中的具体计算流程如图2所示:
42.首先,从海洋模型获得系统输入初始化信息,各个子进程依据主进程分配的地理空间范围读取水深及海洋环境参数。
43.其次,各个子进程根据温度、盐度、深度参数计算分配区域各个网格点的声速剖面。
44.之后,各个子进程针对自己分配区域内的声速剖面进行水声特征诊断,水声特征参数诊断流程图如图3所示:
①
提取网格点的声速剖面,计算从海面到海底的声速垂直梯度。
②
判断表面声速梯度,若其为负声速梯度,则该网格点不存在表面声道,也不符合半声道条件;若其为正声速梯度,则进一步向下诊断查找声速从正声速梯度转负声速梯度过零点位置,也就是声速极大值点,确认该点对应深度为表面声道深度sld,根据公式进一步计算表面声道截止频率sfd;如果正声速梯度从海面一直延伸到海底,则该网格点满足半声道条件haf。
③
利用声速垂直梯度判别声速从海面到海底所有的极小值点,如果两个或更多极小值点深度距离不超过5m,将极小值点合并。根据最终确定的极小值点深度,确定深海声道轴深度dsc和浅海声道轴深度ssx。本系统中设定350m深度作为
深海声道轴深度dsc和浅海声道轴深度ssx的分界线。根据极小值点深度z判断其为浅海声道轴深度ssx(z≤350)还是深海声道轴深度dsc(z》350)。
45.最后,针对海洋环境水声特征参数在全球海域的地理空间分布进行诊断制作并展示预报结果。
46.下面结合具体实施方式对本发明进行详细说明。
47.以a(157.2
°
e,32.8
°
n)点为例,首先利用海洋模型给出a点某一时刻的海洋环境参数预报结果,主要包括温度、盐度及对应的深度等预报结果,根据温度、盐度、深度计算声速剖面,如图4(a)所示,进一步计算从海面到海底的声速垂直梯度,如图4(b)所示。之后,判断海表面处的声速垂直梯度,此例中0m深度的声速梯度为正,因此初步判断存在表面声道;继续沿深度向下,找到正梯度向负梯度转变过零点的深度,此例中为150m,确定该深度为表面声道深度,利用表面声道截止频率公式求取对应的表面声道截止频率,结果为102hz。如果从海面到海底,声速梯度一直为正梯度,则可确认该位置满足半声道条件,显然此例中a点不符合半声道条件。之后,继续沿深度向下,查找正负梯度转变过零点的深度,其中从负梯度向正梯度转变过零点的深度为声速极小值点深度。该例中查找到一个声速极小值点,位于深度900m,因此,可确认a点900m深度为深海声道轴深度,a点不存在浅海声道轴。通过与图4(a)所示的声速剖面特征对比,可见,系统的诊断结果与实际水声环境特征相符合。之后,利用系统再次针对4个网格点的声速剖面进行水声特征诊断,诊断结果显示:图5(a)对应的表面声道深度为165.1m,表面声道截止频率为88.3854hz,深海声道轴深度为1005m;图5(b)满足半声道条件;图5(c)存在三个声道轴,包含两个浅海声道轴,深度分别为85.05m和214.9m,一个深海声道轴,深度为1362m;图5(d)存在一个浅海声道轴,深度为174.9m,深海声道不明显,声道轴深度约为1005m。通过与实际声速剖面对比,可见系统的诊断结果与声速剖面的实际特征相符合。因此,本系统能够准确给出几个水声特征参数的诊断及预报结果。最后,利用预报系统给出了全球海域内针对这些水声环境特征参数的诊断结果,其中,图6是全球海域的表面声道深度sld和表面声道截止频率sfd的诊断预报结果(2月和8月);图7是全球海域的半声道条件haf的诊断预报结果(2月和8月),黑色区域满足半声道条件;图8是全球海域的深海声道轴深度dsc的诊断预报结果(2月和8月);图9是全球海域的浅海声道轴深度ssx的诊断预报结果(2月和8月)。这些预报结果对于提高声呐技术和建立深海预警体系,都有很大的意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1