工业设备表计识别的图像分类方法、装置、电子设备和存储介质与流程
1.本发明涉及图像识别技术领域,特别涉及一种工业设备表计识别的全天候图像分类方法、装置、电子设备和存储介质。
背景技术:
2.近年来,我国的中大型工业生产企业(能源、电力、化工、冶炼、机械加工等)面临着新时期转型发展的需求。对于该类生产企业而言,在其流程生产体系中必不可少的需要使用各类大小工业设备以完成全流程生产、加工等步骤,大小工业设备的可靠性、稳定性是关乎生产质量、成本等要素的关键影响因素。除了远传的仪表数据以外,大量就地仪表的数据往往需要人工巡检记录,通过采用在工业现场加装摄像头的方式,用图像采集相应设备表计读数,从而最终实现工业现场的智能巡检。然而采用摄像头巡检会遇到环境光照不稳定的因素影响,尤其当室外天气因素不稳定或现场光源不足等情况发生时,摄像头为了获得足够曝光度而延长了快门时间,从而用于识别表计的图片将会出现颗粒化现象。为了降低上述情况的影响,需要对用于表计识别的图片进行全天候的图片分类从而更好完成对于表计的识别过程。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种工业设备表计识别的全天候图像分类方法,通过该图像分类方法,使得在光线不足的情况下及时转变相应的图像采集策略,以确保表计识别的准确性。
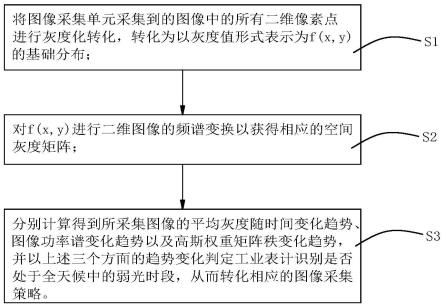
4.为了实现上述目的,本发明第一方面提供了一种工业设备表计识别的全天候图像分类方法,所述图像分类方法包括:在对工业设备表计进行识别的过程中,将图像采集单元采集到的图像中的所有二维像素点进行灰度化转化,转化为以灰度值形式表示为f(x,y)的基础分布,其中x,y分别代表所采集图像的尺寸m
×
n对应的位置点,且0≤x≤m,0≤y≤n;接着对f(x,y)进行二维图像的频谱变换以获得相应的空间灰度矩阵;再分别计算得到所采集图像的平均灰度随时间变化趋势、图像功率谱变化趋势以及高斯权重矩阵秩变化趋势,并以上述三个方面的趋势变化判定工业表计识别是否处于全天候中的弱光时段,从而转化相应的图像采集策略。
5.在进一步的技术方案中,对f(x,y)按照式1-1)的规则转化为灰度图,再根据式1-2)的规则获取图像的平均灰度水平f(x,y);
6.f(x,y)=(x+y)
ꢀꢀ
1-1)
[0007][0008]
在进一步的技术方案中,对f(x,y)按照式2)的规则进行频谱变换:
[0009][0010]
其中u=0,1,2,
…
,m-1;v=0,1,2,
…
,n-1;
[0011]
u,v分别代表傅里叶频谱变换过程后,在频率域上x,y方向上的元素;
[0012]
j为傅里叶变换中采用欧拉变换的虚部;
[0013]
然后将频谱变换后的f(u,v)按照式3)进行功率谱分析:
[0014]
p(u,v)=|f(u,v)}2ꢀꢀ
3)。
[0015]
在进一步的技术方案中,对所采集的图像进行逐点高斯模糊化处理,获取图像的高斯权重矩阵,所述图像的尺寸为m
×
n;设定用于处理的高斯核大小为3
×
3,则有核矩阵为式4):
[0016]
(-1,1)(0,1)(1,1)(-1,0)(0,0)(1,0)(-1,-1)(0,-1)(1,-1)
[0017]
4);
[0018]
将式4)中的(x,y)坐标值结合核矩阵中对应各点的像素值大小,代入中,获得高斯权重矩阵,并根据初等行变换求取高斯模糊化矩阵后的秩大小,所述秩设为g(x,y),其中,σ为图像像素(x,y)在进行统计后得到的标准差;
[0019]
再根据式5)获得图像的秩水平:
[0020][0021]
在进一步的技术方案中,设定图像的平均灰度水平f(x,y)的阈值为f
低
,功率谱p(u,v)的阈值为p
高
,图像的秩水平的阈值为g
低
;按照式6)原则进行判断:
[0022][0023]
当k值<2时,将图像采集单元的采集模式调整为红外图像模式;
[0024]
当k值≥2时,将图像采集单元的采集模式调整为可见光模式。
[0025]
本发明第二方面提供了一种工业设备表计识别的全天候图像分类装置,包括:
[0026]
图像采集模块,用于采集待识别工业设备的表计图像;
[0027]
计算模块,其具有平均灰度水平计算单元、图像边缘差异水平计算单元和噪声能量水平计算单元,分别用于计算所述图像采集模块采集到的图像的平均灰度水平、图像边缘差异水平和噪声能量水平;
[0028]
以及用于计算k值的k值计算单元,其中,
[0029]
k=sig(f)+sig(g)+sig(p);
[0030][0031][0032][0033]
其中,f
低
为图像的平均灰度水平的阈值,p
高
为功率谱的阈值,g
低
为秩水平的阈值;
[0034]
判断模块,用于判断k值大小,若k值<2时,将图像采集模块的采集模式调整为红外图像模式;
[0035]
当k值≥2时,将图像采集模块的采集模式调整为可见光模式。
[0036]
本发明第三方面提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述的处理器执行所述计算机程序时实现上述的图像分类方法。
[0037]
本发明第四方面提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的图像分类方法。
[0038]
与现有技术相比,本发明具有以下技术效果:
[0039]
本发明提供的图像分类方法,通过对图像采集单元采集到的图像进行处理,并进一步从图像的平均灰度水平、边缘差异水平以及噪声能量水平的角度来判断该图像是否能够满足工业设备表计识别的要求,进而决定图像采集单元在红外模式与可见光模式之间切换,以确保工业设备表计识别的准确性。
[0040]
本发明的其他特征和优点将在随后的具体实施方式中予以详细说明。
附图说明
[0041]
图1示出为根据本发明具体实施方式提供的一种工业设备表计识别的全天候图像分类方法的流程图;
[0042]
图2示出为根据本发明具体实施方式提供的一种工业设备表计识别的全天候图像分类装置的示意图;
[0043]
图3示出为在可见光模式下工业设备表计示数清晰图片;
[0044]
图4示出为图3中工业设备在光线不足条件时,可见光模式下采集到模糊图片;
[0045]
图5示出为图4中相同光线条件下,基于本发明提供的图像分类方法后切换到红外模式下采集到的清晰图片。
具体实施方式
[0046]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体附图,进一步阐明本发明。
[0047]
针对现有技术中,在对工业设备进行表计识别的过程中,因受到光照条件的变化影响,在单一图像采集模式下,例如可见光模式下,在光照不足时,采集到的图像不够清楚,无法准确实现表计识别;而现有图像采集设备为了获得足够曝光度而延长快门时间时,采集到的用于表计识别的图像将出现颗粒化现象,仍无法准确识别出表计读数这一技术问题。
[0048]
本发明提供了一种全天候图像分类方法,通过对采集到的图像进行分析处理,以判断出当前光照水平,进而决定是否切换图像采集模式,以确保采集到的图像能够满足标表计识别的要求。
[0049]
请参阅图1,本发明提供的全天候图像分类方法包括以下步骤:
[0050]
s1:在对工业设备表计进行识别的过程中,将图像采集单元采集到的图像中的所有二维像素点进行灰度化转化,转化为以灰度值形式表示为f(x,y)的基础分布;其中x,y分别代表所采集图像的尺寸m
×
n对应的位置点,且0≤x≤m,0≤y≤n;
[0051]
s2:对f(x,y)进行二维图像的频谱变换以获得相应的空间灰度矩阵;
[0052]
s3:分别计算得到所采集图像的平均灰度随时间变化趋势、图像功率谱变化趋势以及高斯权重矩阵秩变化趋势,并以上述三个方面的趋势变化判定工业表计识别是否处于全天候中的弱光时段,从而转化相应的图像采集策略。
[0053]
具体的,本发明中,在确定平均灰度水平的过程中,对f(x,y)按照式1-1)的规则转化为灰度图,再根据式1-2)的规则获取图像的平均灰度水平f(x,y);
[0054]
f(x,y)=(x+y)
ꢀꢀ
1-1)
[0055][0056]
本发明中,在确定图像功率谱的过程中,对f(x,y)按照式2)的规则进行频谱变换:
[0057][0058]
其中u=0,1,2,
…
,m-1;v=0,1,2,
…
,n-1;
[0059]
u,v分别代表傅里叶频谱变换过程后,在频率域上x,y方向上的元素;
[0060]
j为傅里叶变换中采用欧拉变换的虚部;
[0061]
然后将频谱变换后的f(u,v)按照式3)进行功率谱分析:
[0062]
p(u,v)=|f(u,v)|2ꢀꢀ
3)。
[0063]
在确定高斯权重矩阵秩变化趋势的过程中,对所采集的图像进行逐点高斯模糊化处理,获取图像的高斯权重矩阵,所述图像的尺寸为m
×
n;
[0064]
设定用于处理的高斯核大小为3
×
3,则有核矩阵为式4):
[0065]
(-1,1)(0,1)(1,1)(-1,0)(0,0)(1,0)(-1,-1)(0,-1)(1,-1)
[0066]
4);
[0067]
将式4)中的(x,y)坐标值结合核矩阵中对应各点的像素值大小,代入
中,获得高斯权重矩阵,并根据初等行变换求取高斯模糊化矩阵后的秩大小,所述秩设为g(x,y),其中,σ为图像像素(x,y)在进行统计后得到的标准差;
[0068]
再根据式5)获得图像的秩水平:
[0069][0070]
进一步的,设定图像的平均灰度水平f(x,y)的阈值为f
低
,功率谱p(u,v)的阈值为p
高
,图像的秩水平的阈值为g
低
;
[0071]
按照式6)原则进行判断:
[0072][0073]
当k值<2时,说明此时环境光线出现不足,工业设备表计的示数不够清晰;此时需要将图像采集单元的采集模式调整为红外图像模式;当k值≥2时,说明可见光模式下就已经能看清工业设备表计清晰的示数,进而将图像采集单元的采集模式调整为可见光模式。
[0074]
结合图2所示,本发明还提供了一种工业设备表计识别的全天候图像分类装置,所述装置包括图像采集模块、计算模块和判断模块;
[0075]
其中,所述图像采集模块用于采集待识别工业设备的表计图像,所述图像采集模块可采用本领域人员所常用的相机、摄像头等具有拍照功能的终端,通过设置一定的快门模式、曝光度和对焦水平等参数,获得待识别的工业设备的表计图像,具体可参阅图3中,即通过相机在可见光模式下采集到工业设备的表计图像。
[0076]
所述计算模块具有平均灰度水平计算单元、图像边缘差异水平计算单元和噪声能量水平计算单元,分别用于计算所述图像采集模块采集到的图像的平均灰度水平、图像边缘差异水平和噪声能量水平;以及用于计算k值的k值计算单元,其中,
[0077]
k=sig(f)+sig(g)+sig(p);
[0078][0079][0080][0081]
其中,f
低
为图像的平均灰度水平的阈值,p
高
为功率谱的阈值,g
低
为秩水平的阈值;
[0082]
所述判断模块,用于判断k值大小,若k值<2时,将图像采集模块的采集模式调整为红外图像模式;
[0083]
当k值≥2时,将图像采集模块的采集模式调整为可见光模式。
[0084]
通过上述装置来判断当前环境光线水平,进而决定图像采集模块的采集模式,以获得清晰的表计图像,再利用表计识别程序来识别出相应的读数,所述表计识别程序为本领域人员所公知的,本发明在此不做赘述。
[0085]
在本发明的一个具体的实施例中,如图3所示为可见光模式下工业设备表计示数清晰图片;
[0086]
如图4所示为图3中表计在光线不足条件时,可见光模式下采集到模糊图片,该图片质量无法用于表计读数的确定。
[0087]
如图5所示为图4中相同光线条件下,通过本发明提供图像分类方法进行判定后,切换到红外模式下采集到的工业表计读数的清晰图片,该图片质量可用于表计读数的确定。
[0088]
以上显示和描述了本发明的基本原理、主要特征和本发明的特点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求保护的范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1