一种基于点云特征描述推理的点云要素识别方法与流程
1.本发明涉及一种激光雷达点云要素自动识别,尤其涉及一种基于点云特征描述推理的点云要素识别方法。
背景技术:
2.激光扫描系统获取的点云数据处理一般包括数据采集、数据处理、点云分割(或称滤波分类)、地物分类、对象识别与建模五个步骤,激光点云数据分割后,表示某一具体地物实体的激光扫描点集合称为点云要素,其本质仍然是散乱的三维空间点数据集,计算机尚不能识别其代表的实际地物。如何对表示某一地物的散乱点数据集进行表达和描述,以及进行地物的目标识别是本发明主要解决的问题,为了解决上述技术问题,特提出一种新的技术方案。
技术实现要素:
3.本发明提供了一种基于点云特征描述推理的点云要素识别方法,以解决上述背景技术中提出的问题。
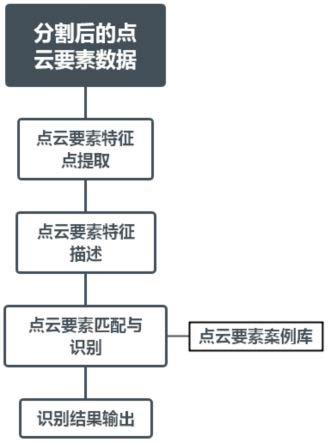
4.本发明所解决的技术问题采用以下技术方案来实现:一种基于点云特征描述推理的点云要素识别方法,该方法包括以下步骤:
5.步骤一、点云要素特征点提取;
6.步骤二、点云要素特征描述;
7.步骤三、点云要素案例库建立;
8.步骤四、点云要素匹配与识别;
9.步骤五、识别结果输出。
10.所述的点云要素特征点提取是采用三维网格采样法进行特征点提取。
11.所述的三维网格采样法具体流程为,首先将三维点云数据根据点云密度划分为多个三维细小网格,然后在所有的网格里面的保留距离中心点最近的点,最后网格内其他的数据被忽略。
12.所述的点云要素特征描述以特征向量矩阵为基础的峰值统计直方图点云要素特征组织与表达方法,通过改进的pfh(point feature histogram)或fast pfh特征计算方法,使得该描述方法能够区分圆柱、平面和球体三种基本形状。
13.通过统计特征向量矩阵内各个维度的平均值,将特征向量矩阵压缩为一个特征向量,用该特征向量表示点云要素,避免了不同点云要素特征向量矩阵内特征向量个数不同的问题,使用各个维度的平均值而不使用各维度值的总和,减少了点的个数不同带来的影响。
14.通过pfh(point feature histogram)或fast pfh方法变换将点云数据集转换为特征向量矩阵,根据不同的地物的特征直方图中,峰值出现的个数、所在的维数均不同,以此为基础,将峰值、峰值个数、峰值所在维数作为组合,作为表示该类地物的特征描述。
15.通过峰值统计直方图计算实现了特征向量个数的压缩,最终将散乱的点云数据集转换为特征向量表示,通过点云要素表面曲率描述方法,建立要素级法向量,比较各个点的法向量与要素法向量的区别,从而能够对表面的曲率进行描述。
16.所述的要素法向量的确定方法是原点选择点云要素的中点pm,法向量方向选择原点至与其距离最远点的方向nm为点云要素的法向量。
17.所述的点云要素案例库建立是通过名称、类别、整体性描述、细节性描述四个部分对点云要素案例进行组织与表达,通过对点云要素进行峰值统计直方图的表达,实现了散乱点云数据集向特征向量的转换,使得点云要素的案例组织和案例表达成为可能。
18.所述的点云要素匹配与识别是指假定有一个已知的案例库,然后决定未知模式与哪个参考模式是最佳匹配,经过特征描述以后,要素的点云数据集转换为特征向量或特征矩阵,模板的匹配转换为特征向量之间相似度的度量。
19.本发明的有益效果为:通过此方法可以实现对实体的扫描,从而形成点云要素,能够形成三维空间点数据集,同时对实体的点数据集进行表达和描述,以便实现对目标的识别,不仅能够识别的更加准确,还能够达到一定的精确程度。
附图说明
20.图1是本发明的结构示意图;
21.图2是本发明分割后路灯点云数据集示意图;
22.图3是本发明路灯三维格网采样数据集示意图;
23.图4是本发明分割后单棵树木点云数据集示意图;
24.图5是本发明单棵树三维格网采样数据集示意图;
25.图6是本发明分割后建筑物立面点云数据集示意图;
26.图7是本发明建筑物立面三维格网采样数据集示意图;
27.图8是本发明点云要素的统计直方图;
28.图9是本发明点云要素中某一点ps与点云要素中点pm的法向量相似度计算图;
29.图10是本发明点云要素基本形状图;
30.图11是本发明点云要素基本形状pfh特征描述图;
31.图12是本发明改进后的点云要素基本形状pfh特征描述图;
32.图13是本发明部分单棵树木案例图;
33.图14是本发明部分路灯案例图;
34.图15是本发明部分建筑物立面案例图;
35.图16是本发明点云要素案例图;
36.图17是本发明统计直方图法路灯识别结果图;
37.图18是本发明统计直方图法单棵树木识别结果图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
39.参照各图一种基于点云特征描述推理的点云要素识别方法,该方法包括以下步骤:
40.步骤一、点云要素特征点提取;
41.步骤二、点云要素特征描述;
42.步骤三、点云要素案例库建立;
43.步骤四、点云要素匹配与识别;
44.步骤五、识别结果输出。
45.所述的点云要素特征点提取是采用三维网格采样法进行特征点提取。为减少计算量加快计算速度,需要对分割后的点云要素进行抽稀与特征点提取。三维点云简化中使用三维网格采样法,按照一定规则,从原始点云中抽取部分数据点作为简化结果,没有抽取到的数据将被忽略。本发明中采用三维网格采样法进行点云数据特征点提取,以便对点云要素进行数据抽稀,同时保留足够的细节特征,该方法没有采用该网格的中心点作为采样点,是为了使采样结果更加准确。
46.所述的三维网格采样法具体流程为,首先将三维点云数据根据点云密度划分为多个三维细小网格,然后在所有的网格里面的保留距离中心点最近的点,最后网格内其他的数据被忽略。
47.所述的点云要素特征描述以特征向量矩阵为基础的峰值统计直方图点云要素特征组织与表达方法,通过pfh(point feature histogram)或fast pfh特征计算方法,使得该描述方法能够区分圆柱、平面和球体三种基本形状。
48.通过统计特征向量矩阵内各个维度的平均值,将特征向量矩阵压缩为一个特征向量,用该特征向量表示点云要素,避免了不同点云要素特征向量矩阵内特征向量个数不同的问题,使用各个维度的平均值而不使用各维度值的总和,减少了点的个数不同带来的影响。
49.通过pfh(point feature histogram)或fast pfh方法变换将点云数据集转换为特征向量矩阵,根据不同的地物的特征直方图中,峰值出现的个数、所在的维数均不同,以此为基础,将峰值、峰值个数、峰值所在维数作为组合,作为表示该类地物的特征描述。如图8所示,将树木的点云通过pfh或fpfh转换为向量矩阵,以矩阵内各个维度的平均值生成特征向量,表示树木点云要素,常规pfh或fpfh方法无法对光滑曲面进行有区别的描述,本发明提出点云要素表面曲率描述方法,通过建立要素级法向量,比较各个点的法向量与要素法向量的区别,从而能够对表面的曲率进行描述。要素法向量的确定方法是:原点选择点云要素的中点pm,法向量方向选择原点至与其距离最远点的方向nm为点云要素的法向量。如图9所示,点云中某一点ps与要素中点pm的法向量相似度可用三元组《αφθ》进行表示,可参考以下公式计算三元组《αφθ》的值;
50.α=v
·nt
[0051][0052]
θ=arctan(w
·nt
,u
·nt
)
[0053]
在计算点云中各点与邻域内点关系的同时计算各点与要素中点和要素法向量的
关系,实现了点云要素的局部特征描述和整体特征描述。
[0054]
基本点云要素形状及常规pfh或fpfh计算结果。
[0055]
对拐角、边、圆锥、平面、圆柱、球体等基本形状进行pfh点云要素特征描述,结果如图11所示,图中对125维特征向量重新进行了直方图统计,压缩为25维进行表示。
[0056]
从图11中可以看出,拐角、边、圆锥的描述特征有着明显的不同,但是圆柱、平面和球体这三类的描述特征相同,在第13维数值接近100,其他维数值为0,无法进行区分,但是仍与拐角、边和圆锥有着明显的区别。圆柱、平面和球体这三类的描述特征相同,这是由于表面曲率较为平滑,在直方图统计装箱的过程中,差别较小的被统计到相同子区间,导致了对圆柱、平面和球体这类的光滑曲面不能进行有效地区分。
[0057]
改进的pfh(point feature histogram)或fast pfh计算结果。
[0058]
该方法对基本几何体的直方图描述如图12所示,图中对125维特征向量重新进行了直方图统计,压缩为25维进行表示,从图12中可以看出圆锥、拐角与边保持了较强的区分性,而圆柱、平面和球体同样有较强的区分性(圆柱在第1至15维均有数值,第13维数值为50左右;平面仅在第13维有数值10;球体在第13、18、23维均有数值),各个基本形状中峰值大小和所在维度明显不同,实现了圆柱、平面、球体光滑曲面的特征描述。
[0059]
实际地物特征描述。
[0060]
利用改进的pfh方法,对路灯、树木、房屋立面进行特征描述,结果如下表所示;此表为部分模型点特征直方图描述:
[0061]
[0062][0063]
从结果表可以看出,路灯在第60维有3个高峰,在第15维和第115维附近各有三个较高的峰值,在第38、62、88维有小的峰值。单棵树木在第15、38、115维附近各有两个或三个较高的峰值,在第62、88维处各有两个较高的峰值。建筑物立面在第15、38、62、88、115维有较高的峰值。因此,不同地物的直方图特征明显不同,并且同一地物内不同形式的建筑物既有一定的共性,又有一定的区别。例如路灯、单棵树木、建筑物立面直方图中峰值的位置、个数明显不同,而建筑物立面2和建筑物立面3中,虽然峰值位置基本相同,但每一位置处的峰值个数不同,也可以进行区分。
[0064]
综上所述,采用点特征直方图法进行点云特征描述,可区分出路灯、单棵树木、建筑物立面等地物。
[0065]
通过峰值统计直方图计算实现了特征向量个数的压缩,最终将散乱的点云数据集转换为特征向量表示,通过点云要素表面曲率描述方法,建立要素级法向量,比较各个点的法向量与要素法向量的区别,从而能够对表面的曲率进行描述。
[0066]
所述的要素法向量的确定方法是原点选择点云要素的中点pm,法向量方向选择原点至与其距离最远点的方向nm为点云要素的法向量。
[0067]
所述的点云要素案例库建立是通过名称、类别、整体性描述、细节性描述四个部分对点云要素案例进行组织与表达,通过对点云要素进行峰值统计直方图的表达,实现了散乱点云数据集向特征向量的转换,使得点云要素的案例组织和案例表达成为可能。
[0068]
点云要素案例作为最小的地物识别研究单元,形式地描述为以下结构:
[0069][0070]
name:名称。它是语义记忆单元的概念性描述,包括案例id、与之相关的文件名和其他描述性信息。
[0071]
class:案例的类别信息。定义该点云要素案例的类别、所属的父类、子类信息。
[0072]
all-descriptor:整体描述信息。包含该点云要素案例的空间边界范围、长、宽、高、体积等信息。
[0073]
detailed-descriptor:细节描述信息。包含峰值统计直方图的所有维数的值。
[0074]
以上描述结构可分成三大类。一类反映案例自身的描述性内容,如name;一类反映案例之间的关系,如class,第三类反映案例自身的特性信息,如all-descriptor,detailed-descriptor。基于案例推理的点云要素识别主要是根据案例之间的自身信息的相似性推断案例所述的分类。all-descriptor,detailed-descriptor均可以比较容易的获得,例如all-descriptor可通过对点云数据集进行遍历统计获得三维范围边界,为避免全局坐标的影响,在此使用与坐标系无关的体积进行相似性计算。detailed-descriptor主要是通过第二步获得的峰值统计直方图进行表达,点云要素分类后,对其点云数据集进行整体的边界范围等进行统计、提取,提取点云要素的点特征直方图、快速点特征直方图,并进行统计。整体和细节特征提取后,添加该案例的名称、类别、对应的文件等信息,形成已知地物类型的点云要素案例库。
[0075]
最后将描述性信息、整体性描述信息、细节性描述信息合并,细节性描述选择pfh或者fpfh统计直方图,形成点云案例的表达,多个案例组合在一起形成案例库
[0076]
所述的点云要素匹配与识别是指假定有一个已知的案例库,然后决定未知模式与哪个参考模式是最佳匹配,经过特征描述以后,要素的点云数据集转换为特征向量或特征矩阵,模板的匹配转换为特征向量之间相似度的度量。
[0077]
具体的相似性计算模型如下:
[0078]
对于空间几何形态信息,主要采用整体形态和细节形态进行相似性计算,其相应的空间形态相似性计算模型构建如下:
[0079]
similarity
case(i,j)
=w1×sr(case(i,j))
+w2×sa(case(i,j))
[0080]
式中similarity
case(i,j)
为点云要素案例i,j的相似性系数;w1和w2分别为权重系数,两者之和为1;s
r(case(i,j))
为点云要素案例i,j之间整体形态的相似性系数;s
a(case(i,j))
为点云要素案例i,j之间细节形态相似性系数。
[0081][0082]
式中,vi,vj为案例i,j的空间体积。在本研究中计算点云要素三维空间中的最小外
包立方体的体积作为案例整体的空间形态,该方法比较简单也易于实现。
[0083]
采用相关系数法的细节形态相似性系数s
a(case(i,j))
计算公式为:
[0084][0085]
细节形态相似性系数采用峰值统计直方图特征向量的相关系数表示,式中n表示案例x,y峰值不为零的维数集合,案例x,y峰值不为零的维数集合,及σ
x
分别是标准分、样本平均值和样本标准差。在计算相关系数时,为减少大部分峰值为0使得相关系数计算不准的情况,需要舍弃峰值均为0的维数,动态选定两个案例之间的有峰值的维数集合参与相似性计算。
[0086]
w1和w2可依据案例对象的类型确定整体与细节的权重系数。求得相似性系数之后,是案例的最终求解过程,比较并确定案例库中的相似性系数最高的案例,作为推理结果。
[0087]
在本发明的描述中,需要理解的是,指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0088]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1