一种针对安全员巡视检测的评估方法与流程
1.本发明属于巡视检测评估技术领域,具体的说是一种针对安全员巡视检测的评估方法。
背景技术:
2.在大型企业内部,特别是化工企业内,往往存在多个巡检点,巡检点往往存在加工设备、人员或者材料需要定期观察,那么企业内部会安排巡检人员,按照一定的时间,定时对这些路径上的巡检点,进行巡检。部分巡检点涉及产品加工,甚至危险化工品的混合等等,需要观察材料状态,人为判断是否继续生产或者暂停生产,提高生产的安全性,保障工作人员和加工设备的安全。
3.总之巡检的任务是有必要的,而在管理角度,如何对执行巡检任务的安全人员进行管理,也是一个亟需解决的问题。安全员的疏忽极有可能造成极大的生产损失甚至生命财产的损失。在化工企业的实际观察中,发现需要一个智能化数字化的产品来解决本需求。
4.鉴于此,本发明通过提出一种针对安全员巡视检测的评估方法及制备工艺,以解决上述技术问题。
技术实现要素:
5.为了解决现有技术的不足,本发明提出的一种针对安全员巡视检测的评估方法;解决了在一些生产企业,尤其是化工企业,需要对设备、材料、人员的进行巡检,保障人员、设备等的安全性,安全员的疏忽极有可能造成极大的生产损失甚至生命财产的损失,如何对执行巡检任务的安全人员进行管理的问题。
6.本发明解决其技术问题所采用的技术方案是:本发明所述的一种针对安全员巡视检测的评估方法,该方法步骤包括:
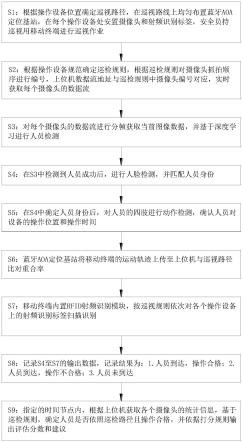
7.s1:根据操作设备位置确定巡视路径,在巡视路线上均匀布置蓝牙aoa定位基站,在每个操作设备处安置摄像头和射频识别标签,安全员持巡视用移动终端进行巡视作业;
8.s2:根据操作设备规范确定巡检规则,根据巡检规则对摄像头抓拍顺序进行编号,上位机数据流地址与巡检规则中摄像头编号对应,实时获取每个摄像头的数据流;
9.s3:对每个摄像头的数据流进行分帧获取当前图像数据,并基于深度学习进行人员检测;
10.s4:在s3中检测到人员成功后,进行人脸检测,并匹配人员身份;
11.s5:在s4中确定人员身份后,对人员的四肢进行动作检测,确认人员对设备的操作位置和操作时间;
12.s6:蓝牙aoa定位基站将移动终端的运动轨迹上传至上位机与巡视路径比对重合率;
13.s7:移动终端内置rfid射频识别模块,按巡视规则依次对各个操作设备上的射频识别标签扫描识别;
14.s8:记录s4至s7的输出数据,记录结果为:1.人员到达,操作合格;2.人员到达,操作不合格;3.人员未到达;
15.s9:指定的时间节点内,根据上位机获取各个摄像头的统计信息,基于巡检规则,确定人员是否依照巡检路径且操作合格,并依据打分规则输出评估分数和建议。
16.优选的,s3中每隔1-10s截取一张图片。
17.优选的,s3中截取的照片4-8张为一组。
18.优选的,s3中利用ffmpeg,基于业务配置,对视频流进行间隔解码,并组成一组图片。
19.优选的,s4中基于哈尔特征和svm算法进行人员检测,基于检测出来的人脸,利用insghtface算法产生112纬的特征向量,基于向量与人脸库中的人脸进行对比,两者间的差距小于指定的阈值,则判定为人员识别成功,为安全员。
20.优选的,s5中利用深度学习算法对人员四肢和操作设备进行检测。
21.优选的,s5中基于目标框的坐标值判断人员四肢和操作设备是否接触。
22.优选的,s5中基于多帧的检测判断人员四肢和操作设备的接触时间。
23.优选的,s7中判断逻辑能够自定义规则,输入为一定时间内的时序信息和业务规则,输出是评估分数与建议。
24.本发明的有益效果如下:
25.1.本发明所述的一种针对安全员巡视检测的评估方法,通过该方法对安全员巡视检测进行评估,降低安全员出现疏忽的概率,且在出现疏忽时,能够及时进行发现,并采取安全措施,进一步保证企业的安全生产。
26.2.本发明所述的一种针对安全员巡视检测的评估方法,通过获取不同时间的静态图像获取动态的结果,且控制数据流的容量,保证判断的准确性,需要足够多的图片数据,保证判断的效率,需要减少判断的照片数,通过控制数据获取频率并进行组合,从而高效准确完成判断。
27.3.本发明所述的一种针对安全员巡视检测的评估方法,支持巡检路径、时序规则的设置,在实际生产中更符合实际场景下的通用性的应用,具有一定的市场价值。
附图说明
28.下面结合附图对本发明作进一步说明。
29.图1是本发明的方法步骤图;
30.图2是本发明的工作流程图。
具体实施方式
31.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
32.如图1至图2所示,本发明所述的一种针对安全员巡视检测的评估方法,包括:该方法步骤包括:
33.s1:根据操作设备位置确定巡视路径,在巡视路线上均匀布置蓝牙aoa定位基站,在每个操作设备处安置摄像头和射频识别标签,安全员持巡视用移动终端进行巡视作业;
34.s2:根据操作设备规范确定巡检规则,根据巡检规则对摄像头抓拍顺序进行编号,上位机数据流地址与巡检规则中摄像头编号对应,实时获取每个摄像头的数据流;
35.s3:对每个摄像头的数据流进行分帧获取当前图像数据,并基于深度学习进行人员检测;
36.s4:在s3中检测到人员成功后,进行人脸检测,并匹配人员身份;
37.s5:在s4中确定人员身份后,对人员的四肢进行动作检测,确认人员对设备的操作位置和操作时间;
38.s6:蓝牙aoa定位基站将移动终端的运动轨迹上传至上位机与巡视路径比对重合率;
39.s7:移动终端内置rfid射频识别模块,按巡视规则依次对各个操作设备上的射频识别标签扫描识别;
40.s8:记录s4至s7的输出数据,记录结果为:1.人员到达,操作合格;2.人员到达,操作不合格;3.人员未到达;
41.s9:指定的时间节点内,根据上位机获取各个摄像头的统计信息,基于巡检规则,确定人员是否依照巡检路径且操作合格,并依据打分规则输出评估分数和建议;
42.在一些生产企业,尤其是化工企业,需要对设备、材料、人员的进行巡检,保障人员、设备等的安全性,安全员的疏忽极有可能造成极大的生产损失甚至生命财产的损失,如何对执行巡检任务的安全人员进行管理,也是一个亟需解决的问题;
43.而本发明中,安全员按照巡检路径和巡检规则手持巡视用移动终端进行巡视作业,巡检路径上的摄像头对安全员的巡检路径、动作进行记录,蓝牙aoa定位基站对移动终端的运动轨迹进行记录,移动终端按顺序识别射频识别标签,识别顺序发生错误时,无法继续识别,提示安全员下个应识别的对象,从而可以对安全员巡视路径进行纠正,按照时序将各个摄像头的数据流上传至上位机,上位机逐帧获取各个摄像头的图像数据,基于深度学习一段时间后进行人员检测,上位机首先确定事物类型,是否为人员,确定为人员后,再通过人脸识别确定人员的身份,是否为安全员,确认为安全员后,根据各个摄像头的数据流,确定该安全员的巡检轨迹,且在巡视路径上布设蓝牙aoa定位基站,在摄像头的监测盲点可以确定安全员的运动轨迹,通过将运动轨迹与巡视路径重合率进行比对,判断巡检路径是否合理,通过对安全员四肢进行动作检测,确定安全员的操作是否规范,当在规定的时间中,未识别到安全员,则输出人员未到达,当在规定的时间内识别到安全员,且安全员操作规范,则输出人员到达,操作合格,当在规定的时间内识别到安全员,但安全员操作不规范,则输出人员到达,操作不合格,上位机根据输出结果进行评估,评估生产的安全性和安全员的操作规范性,并给出对应评分的建议;
44.本发明中,通过该方法对安全员巡视检测进行评估,降低安全员出现疏忽的概率,且在出现疏忽时,能够及时进行发现,并采取安全措施,进一步保证企业的安全生产。
45.作为本发明的一种实施方式,在s3中定时截取照片,将连续截取的多张照片作为一组,根据该组照片数据判断是否为人员。
46.s3中每隔1-10s截取一张图片。
47.s3中截取的照片4-8张为一组。
48.s3中利用ffmpeg,基于业务配置,对视频流进行间隔解码,并组成一组图片;
49.在对人员检测时,通过采用ffmpeg,基于业务配置,对摄像头的视频流进行间隔解码,并组成一组图片,记录、转换数字视频,并能将其转化为数据流,根据巡检点巡检的要求,每隔1-10s截取一张图片,将截取的4-8张为一组,通过获取不同时间的静态图像获取动态的结果,且控制数据流的容量,保证判断的准确性,需要足够多的图片数据,保证判断的效率,需要减少判断的照片数,通过控制数据获取频率并进行组合,从而高效准确完成判断。
50.作为本发明的一种实施方式,s4中基于哈尔特征和svm算法进行人员检测,基于检测出来的人脸,利用insghtface算法产生112纬的特征向量,基于向量与人脸库中的人脸进行对比,两者间的差距小于指定的阈值,则判定为人员识别成功,为安全员。
51.该方法在进行身份识别时,通过人脸识别进行确定是否为安全员,利用insghtface算法产生112纬的特征向量,通过将该特征向量与录入人脸库中的人脸进行对比,确定人员的身份,当两者差距小于阈值时,则输出安全员到达,当两者间的差距超出阈值时,则输出安全员未到达。
52.作为本发明的一种实施方式,s5中利用深度学习算法对人员四肢和操作设备进行检测。
53.s5中基于目标框的坐标值判断人员四肢和操作设备是否接触。
54.s5中基于多帧的检测判断人员四肢和操作设备的接触时间。
55.该方法在对人员动作进行识别时,基于深度学习算法,对安全员的四肢进行检测,在操作设备处建立坐标系,确定人员四肢在坐标系中的位置,从而确定安全员的四肢是否与操作设备进行接触,通过多帧画面确定接触的时间,从而确定安全员的操作是否规范。
56.作为本发明的一种实施方式,s7中判断逻辑能够自定义规则,输入为一定时间内的时序信息和业务规则,输出是评估分数与建议。
57.该方法在能够自定义评估规则,从而适应不同的巡检要求,通过对安全员巡检结果进行评估,保证巡检质量,从而保证企业的安全生产。
58.具体工作流程如下:
59.该方法中,安全员按照巡检路径和巡检规则进行巡检,巡检路径上的摄像头对安全员的巡检路径、动作进行记录,按照时序将各个摄像头的数据流上传至上位机,上位机逐帧获取各个摄像头的图像数据,基于深度学习一段时间后进行人员检测,每隔1-10s截取一张图片,将截取的4-8张为一组,通过获取不同时间的静态图像获取动态的结果,且控制数据流的容量,保证判断的准确性,需要足够多的图片数据,保证判断的效率,需要减少判断的照片数,通过控制数据获取频率并进行组合,从而高效准确完成判断,上位机首先确定事物类型,是否为人员,确定为人员后,再通过人脸识别确定人员的身份,是否为安全员,确认为安全员后,根据各个摄像头的数据流,确定该安全员的巡检轨迹,判断巡检路径是否合理,通过对安全员四肢进行动作检测,确定安全员的操作是否规范,当在规定的时间中,未识别到安全员,则输出人员未到达,当在规定的时间内识别到安全员,且安全员操作规范,则输出人员到达,操作合格,当在规定的时间内识别到安全员,但安全员操作不规范,则输出人员到达,操作不合格,上位机根据输出结果进行评估,评估生产的安全性和安全员的操作规范性,并给出对应评分的建议。
60.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
61.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1