一种基于纹理稳定性的零件图像增强方法与流程
1.本发明涉及人工智能领域,具体涉及一种基于纹理稳定性的零件图像增强方法。
背景技术:
2.由于光照等原因会使得拍摄到的零件图片存在雾化效果,或者因为零件本身纹理较浅,影响进一步提取图片中零件信息,需要对图像进行增强处理,凸显出图片中的纹理信息。
3.现有图片增强方法多采用直方图均衡化和线性灰度拉伸算法,直方图均衡化是通过扩大灰度级量化间隔来达到增强图像的目的,由于该处理是通过各灰度级对应概率密度来扩大量化间隔,导致处理后的效果常出现一些伪轮廓,同时还会将一些纹理细节丢失。线性灰度拉伸没有考虑纹理像素和普通像素的特征,采用一致的拉伸系数对像素的灰度值进行拉伸处理,该处理可能会造成纹理信息的丢失。
技术实现要素:
4.为了克服上述现有技术的缺点,本发明提供一种基于纹理稳定性的零件图像增强方法。
5.为达到上述目的,本发明采用如下技术方案,一种基于纹理稳定性的零件图像增强方法,包括以下步骤:
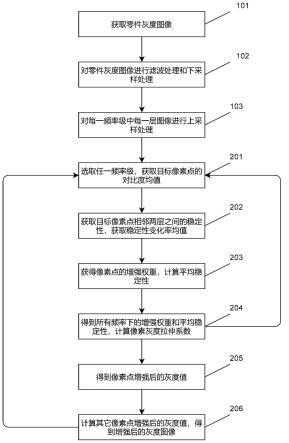
6.s101:获取零件灰度图像;
7.s102:采用不同频率级的高斯滤波器和图像下采样对零件灰度图像进行处理得到不同频率级的第一层图像,对第一层图像按照得到该第一层图像对应的频率级进行高斯滤波器和图像下采样得到第二层图像,依次类推得到每一个频率级对应的多层图像集合;
8.s103:对每一频率级中每一层图像进行上采样得到与零件灰度图像尺度相同的多层图像集合;
9.s201:提取一个像素点作为目标像素点,选取任一频率级中每一层图像相对应的像素点,利用该像素点灰度值和该像素点相邻像素点的灰度值得到对比度均值;
10.s202:提取目标像素点及该像素点相邻像素点的灰度值得到该像素点相邻两层之间的稳定性;利用该稳定性得到该频率下的稳定性变化率均值;
11.s203:利用目标像素点对应的对比度均值及稳定性变化率均值得到该像素点的增强权重;利用像素点相邻两层之间的稳定性计算该频率下的平均稳定性;
12.s204:重复201-203,得到目标像素点所有频率下的增强权重和平均稳定性,通过该像素点所有频率下的增强权重和平均稳定性计算像素点的灰度拉伸系数;
13.s205:利用灰度拉伸系数对目标像素点的灰度值进行增强得到该像素点增强后的灰度值;
14.s206:重复201-205,计算其它像素点增强后的灰度值,通过所有像素点增强后的灰度值得到增强后的灰度图像。
15.进一步的,所述的一种基于纹理稳定性的零件图像增强方法,s201中利用该像素点灰度值和该像素点相邻像素点的灰度值得到对比度均值的方法是:
16.提取目标像素点的灰度值;
17.计算目标像素点八邻域内的灰度值均值;
18.将目标像素点的灰度值与其八邻域内的灰度值均值做差得到目标像素点的对比度;
19.利用各层图像目标像素点的对比度得到对比度均值。
20.进一步的,所述的一种基于纹理稳定性的零件图像增强方法,所述对比度均值的表达式为:
[0021][0022]
式中:表示第j级频率目标像素点的对比度均值,dbo
ij
表示第j级频率第i层图像目标像素点的对比度,k
j-1
σ表示第j级频率对应的高斯滤波器的方差,i表示第i层图像,μ表示图像的总层数。
[0023]
进一步的,所述的一种基于纹理稳定性的零件图像增强方法,s202中提取目标像素点及该像素点相邻像素点的灰度值得到该像素点相邻两层之间的稳定性的方法是:
[0024]
提取每一层目标像素点及该像素点相邻像素点的灰度值得到每一层目标像素点的方向幅值向量;
[0025]
筛选每一层中的最大灰度幅值对应的方向角度作为目标像素点的梯度方向;
[0026]
计算目标像素点相邻两层之间的方向幅值相似度和梯度方向偏差;
[0027]
通过目标像素点相邻两层之间的方向幅值相似度和梯度方向偏差计算目标像素点相邻两层之间的稳定性。
[0028]
进一步的,所述的一种基于纹理稳定性的零件图像增强方法,s205中所述像素点增强后的灰度值表达式为:
[0029][0030]
式中:(xo,yo)表示目标像素点的坐标,p(xo,yo)表示零件灰度图像中目标像素点的灰度值,p1(xo,yo)表示零件灰度图像中目标像素点增强后的灰度值,p(xf,yf)表示零件灰度图像中(xf,yf)坐标处像素点的灰度值,m表示零件灰度图像中的像素点个数,f表示零件灰度图像中第f个像素点,lso表示目标像素点的灰度拉伸系数。
[0031]
进一步的,所述的一种基于纹理稳定性的零件图像增强方法,所述像素点的灰度拉伸系数的表达式为:
[0032][0033]
式中:lso表示目标像素点的灰度拉伸系数,j表示第j级频率,l表示频率级个数,wdoj表示第j级频率目标像素点的平均稳定性,qzoj表示第j级频率目标像素点的增强权重。
[0034]
本发明的有益效果是:本发明结合金字塔算法分析纹理的稳定性特征,对不同稳定性层级的像素给出不同的增强系数,使得能够反映事物种类的粗特征表征效果更强;本发明在对纹理增强时还考虑了该纹理属于噪声的可能性,对有可能是噪声的纹理进行了有效抑制。
附图说明
[0035]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0036]
图1为本发明实施例中一种基于纹理稳定性的零件图像增强方法流程示意图;
[0037]
图2为增强权重曲线示意图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
实施例1
[0040]
本实施例所针对的场景为:获得一张在自然光下拍摄的零件图片,通过分析该图像中纹理特征的稳定性来计算出灰度拉伸系数,从而实现对图像进行自适应的增强处理,使得增强后的图片纹理信息更丰富。
[0041]
本发明实施例提供一种基于纹理稳定性的零件图像增强方法,如图1所示,包括:
[0042]
获取零件灰度图像;
[0043]
在自然光下,拍摄一张零件图片,将采集到的零件图片从rgb空间转化至灰度空间,得到零件灰度图像。
[0044]
采用不同频率级的高斯滤波器和图像下采样对零件灰度图像进行处理得到不同频率级的第一层图像,对第一层图像按照得到该第一层图像对应的频率级进行高斯滤波器和图像下采样得到第二层图像,依次类推得到每一个频率级对应的多层图像集合;
[0045]
利用金字塔对零件灰度图像进行处理:利用方差为[σ,kσ,k2σ,
…
,k
(l-1)
σ]尺度长宽为5*5的高斯滤波器对图像t0(零件灰度图像)进行滤波处理,滤波完成后通过删除偶行偶列的方式对各图像进行下采样,得到图像序列此处σ通常取值为1.6,k通常取2,l通常取8。再次利用方差为[σ,kσ,k2σ,
…
,k
(l-1)
σ]尺度长宽为5*5的高斯滤波器对图像进行滤波和下采样处理得到图像集合循环上述滤波处理和下采样处理过程直到得到l个频率级5层的图像集合
[0046]
对每一频率级中每一层图像进行上采样得到与零件灰度图像尺度相同的多层图像集合;
[0047]
以第j级频率为例说明,获取第j级频率图像,所述第j级频率图像是指利用方差为kj-1
σ的高斯滤波器进行滤波处理和下采样得到的各层图像集合,将各层图像进行上采样得到与原零件灰度图像尺度相同的图像,将该图像集合记为
[0048]
提取一个像素点作为目标像素点,选取任一频率级中每一层图像相对应的像素点,利用该像素点灰度值和该像素点相邻像素点的灰度值得到对比度均值;
[0049]
以第j级第i层图像为例,目标像素点坐标为(xo,yo),计算该位置处像素灰度值与其八邻域内像素灰度均值的差异,该差异即为该位置处像素的对比度,对比度的表达式为:
[0050][0051]
式中:(xo,yo)表示目标像素点坐标,表示目标像素点八邻域内像素灰度均值,p
ij
(xo,yo)表示第j级频率第i层图像目标像素点的灰度值,dbo
ij
表示第j级频率第i层图像的目标像素点的对比度。
[0052]
由于层级越高对纹理对比度的要求越高,因而其应该拥有更高的权重值。而计算各层级对比度权重时,需考虑层数、高斯滤波核的大小和高斯滤波器方差,纹理滤波核越大则对比度间隔越大,方差越大则层间间隔越大。因而通过第j级各层图片目标像素点的对比度得到对比度均值,表达式为:
[0053][0054]
式中:表示第j级频率目标像素点的对比度均值,dbo
ij
表示第j级频率第i层图像目标像素点的对比度,k
j-1
σ表示第j级频率对应的高斯滤波器的方差,i表示第i层图像,μ表示图像的总层数。
[0055]
提取目标像素点及该像素点相邻像素点的灰度值得到该像素点相邻两层之间的稳定性;利用该稳定性得到该频率下的稳定性变化率均值;
[0056]
以第i层图像为例说明,提取第j级频率第i层灰度图像中目标像素点在各个方向处的灰度幅值:利用尺度5*5的滑窗步长为1在第i层图像滑动,利用该滑窗滑动得到中心像素与各方向像素的灰度幅值,其中滑窗中心像素与第i层图像目标像素点重合,目标像素点在水平方向的灰度幅值为:
[0057][0058]
式中:表示第j级频率第i层图像目标像素点在水平方向的灰度幅值,(xo,yo)表示目标像素点坐标,p
ij
(xo,yo)表示第j级频率第i层图像目标像素点的灰度值,p
ij
(x
o-1,yo)表示第j级频率第i层图像(x
o-1,yo)像素点的灰度值,p
ij
(x
o-2,yo)表示第j级频率第i层图像(x
o-2,yo)像素点的灰度值,p
ij
(xo+1,yo)表示第j级频率第i层图像(xo+1,yo)像素点的灰度值,p
ij
(xo+2,yo)表示第j级频率第i层图像(xo+2,yo)像素点的灰度值。
[0059]
类比这种方式可以得到目标像素在与水平方向成22.5度方向的灰度幅值为:
[0060][0061]
式中:表示第j级频率第i层图像目标像素在与水平方向成22.5度方向的灰度幅值,p
ij
(xo+2,yo+1)表示第j级频率第i层图像(xo+2,yo+1)像素点的灰度值,p
ij
(x
o-2,y
o-1)表示第j级频率第i层图像(x
o-2,y
o-1)像素点的灰度值。
[0062]
目标像素在与水平方向成45度方向的灰度幅值:
[0063][0064]
式中:表示第j级频率第i层图像目标像素在与水平方向成45度方向的灰度幅值,p
ij
(xo+1,yo+1)表示第j级频率第i层图像(xo+1,yo+1)像素点的灰度值,p
ij
(xo+2,yo+2)表示第j级频率第i层图像(xo+2,yo+2)像素点的灰度值,p
ij
(x
o-1,y
o-1)表示第j级频率第i层图像(x
o-1,y
o-1)像素点的灰度值,p
ij
(x
o-2,y
o-2)表示第j级频率第i层图像(x
o-2,y
o-2)像素点的灰度值。
[0065]
目标像素在与水平方向成67.5度方向的灰度幅值为:
[0066][0067]
式中:表示第j级频率第i层图像目标像素在与水平方向成67.5度方向的灰度幅值,p
ij
(xo+1,yo+2)表示第j级频率第i层图像(xo+1,yo+2)像素点的灰度值,p
ij
(x
o-1,y
o-2)表示第j级频率第i层图像(x
o-1,y
o-2)像素点的灰度值。
[0068]
目标像素在与水平方向成90度方向的灰度幅值:
[0069][0070]
式中:表示第j级频率第i层图像目标像素在与水平方向成90度方向的灰度幅值,p
ij
(xo,y
o-1)表示第j级频率第i层图像(xo,y
o-1)像素点的灰度值,p
ij
(xo,y
o-2)表示第j级频率第i层图像(xo,y
o-2)像素点的灰度值,p
ij
(xo,yo+1)表示第j级频率第i层图像(xo,yo+1)像素点的灰度值,p
ij
(xo,yo+2)表示第j级频率第i层图像(xo,yo+2)像素点的灰度值。
[0071]
目标像素在与水平方向成112.5度方向的灰度幅值:
[0072][0073]
式中:表示第j级频率第i层图像目标像素在与水平方向成112.5度方向的灰度幅值,p
ij
(x
o-1,yo+2)表示第j级频率第i层图像(x
o-1,yo+2)像素点的灰度值,p
ij
(xo+1,y
o-2)表示第j级频率第i层图像(xo+1,y
o-2)像素点的灰度值。
[0074]
目标像素在与水平方向成135度方向的灰度幅值:
[0075][0076]
式中:表示第j级频率第i层图像目标像素在与水平方向成135度方向的灰度幅值,p
ij
(x
o-1,yo+1)表示第j级频率第i层图像(x
o-1,yo+1)像素点的灰度值,p
ij
(x
o-2,yo+2)表示第j级频率第i层图像(x
o-2,yo+2)像素点的灰度值,p
ij
(xo+1,y
o-1)表示第j级频率第i层图像(xo+1,y
o-1)像素点的灰度值,p
ij
(xo+2,y
o-2)表示第j级频率第i层图像(xo+2,y
o-2)像素点的灰度值。
[0077]
目标像素在与水平方向成157.5度方向的灰度幅值:
[0078][0079]
式中:表示第j级频率第i层图像目标像素在与水平方向成157.5度方向的灰
度幅值,p
ij
(x
o-2,yo+1)表示第j级频率第i层图像(x
o-2,yo+1)像素点的灰度值,p
ij
(xo+2,y
o-1)表示第j级频率第i层图像(xo+2,y
o-1)像素点的灰度值。
[0080]
进而得到第j级频率第i层图像该目标像素点的方向幅值向量为:
[0081][0082]
筛选出最大灰度幅值对应的角度θ
ij
,该方向即为第i层图像该目标像素点的梯度方向。通过此方法可以得到第j级频率各层图像目标像素点的方向幅值向量和梯度方向。
[0083]
计算第j级频率相邻两层目标像素点的方向幅值相似度,表达式为:
[0084]
xso
ij
=<fz
ij
,fz
(i+1)j
》
[0085]
式中:fz
ij
表示第j级频率第i层目标像素点的方向幅值向量,fz
(i+1)j
表示第j级频率第i+1层目标像素点的方向幅值,xso
ij
表示第j级频率第i层图像和第i+1层图像目标像素点的方向幅值相似度,<fz
ij
,fz
(i+1)j
》表示计算两向量相似度,该处相似度是通过计算两向量之间的欧式距离得到。
[0086]
类比此公式计算每相邻两层图像目标像素点的方向幅值相似度。
[0087]
计算相邻两层目标像素点的梯度方向偏差,表达式为:
[0088][0089]
表示第j级频率第i层图像和第i+1层图像目标像素点的梯度方向偏差,θ
i+1
表示第i+1层图像该目标像素点的梯度方向,θi表示第i层图像该目标像素点的梯度方向。
[0090]
通过此公式计算每相邻两层图像目标像素点的梯度方向偏差。
[0091]
根据梯度方向偏差和方向幅值相似度计算计算稳定性,表达式为:
[0092][0093]
式中:wdo
ij
表示第j级频率第i层图像和第i+1层图像目标像素点的稳定性,xso
ij
表示第j级频率第i层图像和第i+1层图像目标像素点的方向幅值相似度,表示第j级频率第i层图像和第i+1层图像目标像素点的梯度方向偏差。
[0094]
类比此公式可以得到每相邻两层目标像素点对应的稳定性。
[0095]
计算第j级频率目标像素点的稳定性变化率均值,表达式为:
[0096][0097]
式中:wloj表示第j级频率目标像素点的稳定性变化率均值,wdo
(i+1)j
表示第j级频率第i+1层图像和第i+2层图像目标像素点的稳定性,wdo
ij
表示第j级频率第i层图像和第i+1层图像目标像素点的稳定性,i表示第i层图像,μ表示图像的总层数。
[0098]
利用目标像素点对应的对比度均值及稳定性变化率均值得到该像素点的增强权重;利用像素点相邻两层之间的稳定性计算该频率下的平均稳定性;
[0099]
一般对比度较强、稳定性变化率较快的像素点是噪声的概率较大,因而此时该像素点的增强权重应该降低,增强权重的表达式为:
[0100][0101]
式中:qzoj表示第j级频率目标像素点的增强权重。
[0102]
该公式能够实现随着像素点稳定性变化率均值与对比度均值乘积提高时像素点的增强权重降低,而像素点的稳定性变化率均值和对比度均值乘积较小时,像素点的增强权重保持在平稳的较高数值内,如图2所示。
[0103]
计算第j级频率目标像素点的平均稳定性,表达式为:
[0104][0105]
式中:wdoj表示第j级频率目标像素点的平均稳定性,wdo
ij
表示第j级频率第i层图像和第i+1层图像目标像素点的稳定性,i表示第i层图像,μ表示图像的总层数。
[0106]
得到目标像素点所有频率下的增强权重和平均稳定性,通过该像素点所有频率下的增强权重和平均稳定性计算像素点的灰度拉伸系数;
[0107]
通过上述过程可以计算出不同频率级该目标像素点的增强权重和平均稳定性,通过不同频率级该目标像素点的增强权重和平均稳定性计算该目标像素点的灰度拉伸系数,表达式为:
[0108][0109]
式中:lso表示目标像素点的灰度拉伸系数,j表示第j级频率,l表示频率级个数,wdoj表示第j级频率目标像素点的平均稳定性,qzoj表示第j级频率目标像素点的增强权重。
[0110]
利用灰度拉伸系数对目标像素点的灰度值进行增强得到该像素点增强后的灰度值;
[0111]
像素点增强后的灰度值的表达式为:
[0112][0113]
式中:(xo,yo)表示目标像素点的坐标,p(xo,yo)表示零件灰度图像中目标像素点的灰度值,p1(xo,yo)表示零件灰度图像中目标像素点增强后的灰度值,p(xf,yf)表示零件灰度图像中(xf,yf)坐标处像素点的灰度值,m表示零件灰度图像中的像素点个数,f表示零件灰度图像中第f个像素点,lso表示目标像素点的灰度拉伸系数。
[0114]
计算其它像素点增强后的灰度值,通过所有像素点增强后的灰度值得到增强后的灰度图像。
[0115]
类比此方法可以得到零件灰度图像中每个像素点进行像素增强后的灰度值,通过所有像素点增强后的灰度值得到增强后的灰度图像。
[0116]
本发明结合金字塔算法分析纹理的稳定性特征,对不同稳定性层级的像素给出不同的增强系数,使得能够反映事物种类的粗特征表征效果更强;本发明在对纹理增强时还考虑了该纹理属于噪声的可能性,对有可能是噪声的纹理进行了有效抑制。
[0117]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1