一种基于三维成像的实体建模用扫描设备
1.本发明涉及三维成像技术领域,具体为一种基于三维成像的实体建模用扫描设备。
背景技术:
2.三维扫描仪的作用简单来讲,就是用工业相机尽可能完整、高精度的采集宏观物体表面的数据到我们的计算机上。在工业领域中,若厂家生产或者购买到一个复杂工件,想要对这个工件进行一个全面的测量,进行逆向工程建模,或者希望调整改变这个工件的外形以及功能,而我们用传统的量具无法进行全面测量,这个时候就需要用到三维扫描技术,将工件完整的三维数据扫描出来,导入到三维建模软件中进行对应的检测操作。
3.三维扫描的原理就是通过光学发射孔发射出激光、led光、蓝色光栅等结构光,工业相机接收反射回来的光信号,测量时间差,根据不同光的传播速度,可以计算出距离,这样就可以记录被测物体表面大量密集的点的三维坐标,再将这些密集的点连接起来就形成了面,从而逐步构成被测物体的三维模型。
4.现有技术中,如中国专利号为:cn 210070850 u的“一种全场景三维扫描建模装置”,包括支撑座、扫描仪,所述支撑座的背侧通过滑杆固定滑动连接有升降杆,所述升降杆的顶端转动连接有伸缩杆,所述伸缩杆远离升降杆的一端与扫描仪固定相连,所述升降杆的底端固定连接有对称的驱动齿条,所述驱动齿条通过过渡齿轮连接有稳定件;此装置是在对设备做竖直方向的调节时,通过稳定座能够实现对支撑座进行有效的支撑,从而防止因设备重心改变而对稳定性带来不利影响。
5.但现有技术中,针对高度、体积较大的工件进行三维扫描成像时,传统的人工手持三维扫描成像仪,需要扫描人员围绕工件四周进行采集工作,不仅扫描耗时长,扫描人员的扫描速率、手持平稳性均会对三维模型的成像精度造成影响,并且在较高工件的顶部进行扫描工作时,还需扫描人员登高操作,工作极为不便且危险性大大提升。
6.所以我们提出了一种基于三维成像的实体建模用扫描设备,以便于解决上述中提出的问题。
技术实现要素:
7.本发明的目的在于提供一种基于三维成像的实体建模用扫描设备,以解决上述背景技术提出的传统的人工手持三维扫描成像仪,需要扫描人员围绕工件四周进行采集工作,不仅扫描耗时长,扫描人员的扫描速率、手持平稳性均会对三维模型的成像精度造成影响,并且在较高工件的顶部进行扫描工作时,还需扫描人员登高操作,工作极为不便且危险性大大提升的问题。
8.为实现上述目的,本发明提供如下技术方案:一种基于三维成像的实体建模用扫描设备,包括:扫描架和环绕扫描机构,所述扫描架的顶部内侧与环绕扫描机构的顶部活动安装,所述环绕扫描机构包括夹持组件、底架、控制器、偏转组件、升降组件、限位杆和蓝光
扫描仪,所述夹持组件的底部与底架的顶部活动安装,且底架的底部通过偏转组件与限位杆的底端活动安装,所述底架的外侧与控制器的外侧固定安装,所述限位杆的顶端与升降组件的顶端固定安装,且升降组件的底部与蓝光扫描仪的顶部活动安装,所述夹持组件包括底板,所述底板的两端分别活动安装有两组折叠杆,且两组折叠杆之间活动安装有顶杆,两个所述顶杆之间的两端分别活动安装有两个夹持轮a,所述底板的内侧活动安装有夹持轮b,且夹持轮b的轴心处一侧活动插接有从动轮,所述底板的两侧顶部均固定安装有固定块,且固定块的底端活动安装有收缩弹簧,所述收缩弹簧的顶部与顶杆的底部活动安装。
9.优选的,所述蓝光扫描仪包括主体,所述主体的两端对称固定安装有高分辨率工业镜头,且两个高分辨率工业镜头之间固定安装有蓝光发射源。
10.优选的,所述升降组件包括升降电机,所述升降电机的外侧与限位杆的顶端固定安装,且升降电机的输出端活动安装有收纳盘,所述收纳盘的外侧活动缠绕连接有连索,且连索的底端活动安装有夹具,所述夹具的一侧与主体的外侧固定卡接,且夹具的另一侧与限位杆的外侧活动套接。
11.优选的,所述底架包括底杆,所述底杆一端的两侧对称活动安装有连杆a,且底杆另一端的两侧对称活动安装有连杆b,所述连杆a的外侧与控制器的外侧固定安装,所述折叠杆的外侧开设有滑槽,所述连杆a的顶端与一组折叠杆的滑槽活动卡接,所述连杆b的顶端与另一组折叠杆的滑槽活动卡接。
12.优选的,所述连杆b的外侧固定安装有位移电机,且位移电机的输出端活动套接有传动带,所述传动带的顶端内侧与从动轮的外侧活动套接。
13.优选的,所述偏转组件包括齿面盘,所述齿面盘的底部活动卡接有限位块,且限位块的外侧与底杆的内侧固定安装,所述齿面盘的外侧啮合连接有蜗杆,且蜗杆的一端活动安装有偏转电机。
14.优选的,所述齿面盘的轴心处底部固定安装有转接件,且转接件的底端与限位杆的顶端活动安装。
15.优选的,所述扫描架包括立杆、底环和顶环,所述立杆的顶端与顶环的一侧底部固定安装,且立杆的底端与底环的一侧顶部固定安装,所述顶环的下表面与夹持轮b的顶部活动安装,且顶环的上表面与两个夹持轮a的底部活动安装。
16.优选的,所述立杆的两侧对称固定安装有多个弧形支撑杆,且每个弧形支撑杆的底端与底环的顶部焊接,所述限位杆的外侧与弧形支撑杆的内侧滑动连接。
17.优选的,所述底环和顶环之间可加装铺设遮光膜。
18.与现有技术相比,本发明的有益效果是:
19.1、通过环绕扫描机构的设置,实现了将扫描架套接于工件外侧后,夹持组件将携带其底部的蓝光扫描仪沿扫描架顶部,进行环绕运动并逐层采集成像信息,对工件三维信息完成采集后,将每层的三维成像逐层叠加,以形成工件完整的三维模型,能自动针对体积、高度大的工件进行高精度三维成像采集工作,不仅排除了因人工采集所造成的干扰,还提升了大工件的三维成像效率;
20.2、通过环绕扫描机构的设置,实现了当扫描架的顶环夹持于夹持轮a和夹持轮b之间时,因收缩弹簧的收缩,带动夹持轮a和夹持轮b对象挤压顶环,增大夹持组件与顶环之间的摩擦力,且升降电机通过正反转带动收纳盘对连索的缠绕收放工作,从而实现平稳控制
夹具及其内侧卡接的蓝光扫描仪沿限位杆的高度调整工作,能平稳地对蓝光扫描仪的环绕和升降调节,避免了因晃动而导致的成像精度下降的问题;
21.3、通过扫描架的设置,实现了针对体积较大的工件进行三维扫描成像采集工作时,尤其处于户外且不易搬运的工件,可快速将扫描架及其顶部的环绕扫描机构,搭设在工件四周,并且其底环和顶环之间可加装铺设遮光膜,遮光膜可将被测工件与外界环境隔离,防止采集信息时,外界环境光影响采集精度的问题。
附图说明
22.图1为本发明一种基于三维成像的实体建模用扫描设备的立体图;
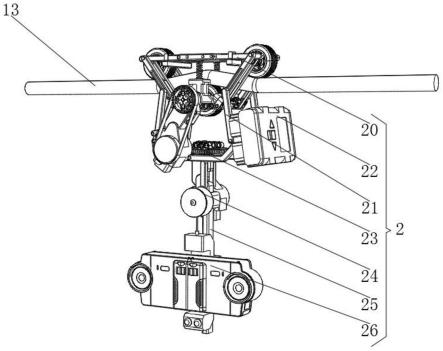
23.图2为本发明一种基于三维成像的实体建模用扫描设备俯视的立体图;
24.图3为本发明一种基于三维成像的实体建模用扫描设备环绕扫描机构正面的结构立体图;
25.图4为本发明一种基于三维成像的实体建模用扫描设备环绕扫描机构背面的结构立体图;
26.图5为本发明一种基于三维成像的实体建模用扫描设备夹持组件的结构示意图;
27.图6为本发明一种基于三维成像的实体建模用扫描设备底架的结构示意图;
28.图7为本发明一种基于三维成像的实体建模用扫描设备偏转组件的结构示意图;
29.图8为本发明一种基于三维成像的实体建模用扫描设备升降组件的结构示意图;
30.图9为本发明一种基于三维成像的实体建模用扫描设备环绕扫描机构的侧视结构示意图。
31.图中:
32.1、扫描架;2、环绕扫描机构;20、夹持组件;21、底架;22、控制器;23、偏转组件;24、升降组件;25、限位杆;26、蓝光扫描仪;204、底板;203、折叠杆;201、顶杆;202、夹持轮a;205、夹持轮b;208、从动轮;206、固定块;207、收缩弹簧;260、主体;262、高分辨率工业镜头;261、蓝光发射源;240、升降电机;241、收纳盘;242、连索;243、夹具;211、底杆;210、连杆a;212、连杆b;209、滑槽;213、位移电机;214、传动带;231、齿面盘;230、限位块;233、蜗杆;232、偏转电机;234、转接件;10、立杆;12、底环;13、顶环;11、弧形支撑杆。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施条例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.请参阅图1-9,本发明提供一种技术方案:一种基于三维成像的实体建模用扫描设备,包括:扫描架1和环绕扫描机构2,扫描架1的顶部内侧与环绕扫描机构2的顶部活动安装,环绕扫描机构2包括夹持组件20、底架21、控制器22、偏转组件23、升降组件24、限位杆25和蓝光扫描仪26,夹持组件20的底部与底架21的顶部活动安装,且底架21的底部通过偏转组件23与限位杆25的底端活动安装,底架21的外侧与控制器22的外侧固定安装,限位杆25的顶端与升降组件24的顶端固定安装,且升降组件24的底部与蓝光扫描仪26的顶部活动安
装,夹持组件20包括底板204,底板204的两端分别活动安装有两组折叠杆203,且两组折叠杆203之间活动安装有顶杆201,两个顶杆201之间的两端分别活动安装有两个夹持轮a202,底板204的内侧活动安装有夹持轮b205,且夹持轮b205的轴心处一侧活动插接有从动轮208,底板204的两侧顶部均固定安装有固定块206,且固定块206的底端活动安装有收缩弹簧207,收缩弹簧207的顶部与顶杆201的底部活动安装;当扫描架1的顶环13夹持于夹持轮a202和夹持轮b205之间时,因收缩弹簧207的收缩,而使得折叠杆203向顶杆201方向挤压,从而带动夹持轮a202和夹持轮b205对象挤压顶环13,增大夹持组件20与顶环13之间的摩擦力;针对体积较大的工件进行三维扫描成像采集工作时,尤其处于户外且不易搬运的工件,可快速将扫描架1及其顶部的环绕扫描机构2,搭设在工件四周,将扫描架1套接于工件外侧后,夹持组件20将携带其底部的底架21、控制器22、偏转组件23、升降组件24、限位杆25和蓝光扫描仪26沿扫描架1顶部进行环绕运动并逐层采集成像信息,在采集成像信息时,蓝光扫描仪26每沿扫描架1顶部环绕运动一周后,升降组件24将控制蓝光扫描仪26沿限位杆25下降一个层级,从而能实现对工件三维信息完成采集后,将每层的三维成像逐层叠加,以形成工件完整的三维模型。
35.如图8所示,蓝光扫描仪26包括主体260,主体260的两端对称固定安装有高分辨率工业镜头262,且两个高分辨率工业镜头262之间固定安装有蓝光发射源261,蓝光发射源261采用窄带蓝光光源,抗干扰性强,而两个高分辨率工业镜头262搭载900万像素相机的蓝光三维检测系统,在进行三维扫描成像时,由蓝光发射源261发射出的蓝光信号照射至工件表面后,其反射光将由两个高分辨率工业镜头262所接收,利用测量时间差,根据蓝光的传播速度,可以计算出距离,并记录被测物体表面大量密集的点的三维坐标,再将这些密集的点连接起来就形成了面,构成被测物体单层的三维模型,完成整体扫描后,通过逐层叠加的形式组合获得被测物体的完成三维模型。
36.如图8所示,升降组件24包括升降电机240,升降电机240的外侧与限位杆25的顶端固定安装,且升降电机240的输出端活动安装有收纳盘241,收纳盘241的外侧活动缠绕连接有连索242,且连索242的底端活动安装有夹具243,夹具243的一侧与主体260的外侧固定卡接,且夹具243的另一侧与限位杆25的外侧活动套接,升降电机240可通过正反转带动收纳盘241对连索242的缠绕收放工作,从而实现平稳控制夹具243及其内侧卡接的蓝光扫描仪26沿限位杆25的高度调整工作。
37.如图3、图5和图6所示,底架21包括底杆211,底杆211一端的两侧对称活动安装有连杆a210,且底杆211另一端的两侧对称活动安装有连杆b212,连杆a210的外侧与控制器22的外侧固定安装,折叠杆203的外侧开设有滑槽209,连杆a210的顶端与一组折叠杆203的滑槽209活动卡接,连杆b212的顶端与另一组折叠杆203的滑槽209活动卡接,连杆a210和连杆b212均可沿着滑槽209滑动,而控制器22用于接收无线控制指令,改变环绕扫描机构2的环绕速度和升降速度,从而获取更精准的三维模型。
38.如图3和图6所示,连杆b212的外侧固定安装有位移电机213,且位移电机213的输出端活动套接有传动带214,传动带214的顶端内侧与从动轮208的外侧活动套接,位移电机213通过传动带214带动从动轮208及其一端相连的夹持轮b205,使得夹持轮b205在顶环13底部进行滚动,从而实现整个环绕扫描机构2沿顶环13循环环绕位移。
39.如图7所示,偏转组件23包括齿面盘231,齿面盘231的底部活动卡接有限位块230,
且限位块230的外侧与底杆211的内侧固定安装,齿面盘231的外侧啮合连接有蜗杆233,且蜗杆233的一端活动安装有偏转电机232,偏转电机232通过蜗杆233带动齿面盘231发生偏转运动,从而带动其底部的限位杆25和蓝光扫描仪26能在环绕位移时,始终正对指向顶环13的轴心处,即与被测工件的表面垂直。
40.如图4和图7所示,齿面盘231的轴心处底部固定安装有转接件234,且转接件234的底端与限位杆25的顶端活动安装,转接件234用于限位杆25的快速安装。
41.如图1和图2所示,扫描架1包括立杆10、底环12和顶环13,立杆10的顶端与顶环13的一侧底部固定安装,且立杆10的底端与底环12的一侧顶部固定安装,顶环13的下表面与夹持轮b205的顶部活动安装,且顶环13的上表面与两个夹持轮a202的底部活动安装,底环12用于提升扫描架1底部与放置地面的接触面积,从而提升扫描架1的稳定性能。
42.如图1和图2所示,立杆10的两侧对称固定安装有多个弧形支撑杆11,且每个弧形支撑杆11的底端与底环12的顶部焊接,限位杆25的外侧与弧形支撑杆11的内侧滑动连接,多个弧形支撑杆11用于提升扫描架1的结构强度,防止扫描架1在进行采集时发生倾倒。
43.如图1所示,底环12和顶环13之间可加装铺设遮光膜,遮光膜可将被测工件与外界环境隔离,防止采集信息时,外界环境光影响采集精度的问题。
44.本装置使用方法及工作原理:针对体积较大的工件进行三维扫描成像采集工作时,尤其处于户外且不易搬运的工件,可快速将扫描架1及其顶部的环绕扫描机构2,搭设在工件四周,将扫描架1套接于工件外侧后,扫描架1的顶环13夹持于夹持轮a202和夹持轮b205之间时,因收缩弹簧207的收缩,而使得折叠杆203向顶杆201方向挤压,从而带动夹持轮a202和夹持轮b205对象挤压顶环13,增大夹持组件20与顶环13之间的摩擦力,位移电机213通过传动带214带动从动轮208及其一端相连的夹持轮b205,使得夹持轮b205在顶环13底部进行滚动,从而实现整个环绕扫描机构2沿顶环13循环环绕位移,底部的蓝光扫描仪26沿扫描架1顶部进行环绕运动并逐层采集成像信息,在采集成像信息时,由蓝光发射源261发射出的蓝光信号照射至工件表面后,其反射光将由两个高分辨率工业镜头262所接收,利用测量时间差,根据蓝光的传播速度,可以计算出距离,并记录被测物体表面大量密集的点的三维坐标,再将这些密集的点连接起来就形成了面,构成被测物体单层的三维模型,完成整体扫描后,通过逐层叠加的形式组合获得被测物体的完成三维模型。蓝光扫描仪26每沿扫描架1顶部环绕运动一周后,升降电机240可通过正反转带动收纳盘241对连索242的缠绕收放工作,从而实现平稳控制夹具243及其内侧卡接的蓝光扫描仪26沿限位杆25的高度调整工作,蓝光扫描仪26沿限位杆25下降一个层级继续进行环绕采集工作,对工件三维信息完成采集后,将每层的三维成像逐层叠加,以形成工件完整的三维模型。
45.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1