一种建筑垃圾堆放点体量估计方法和装置
1.本发明涉及堆放点体量估计,尤其涉及建筑垃圾堆放点体量估计。
背景技术:
2.建筑垃圾(construction and demolition waste,cdw)是工程渣土、工程泥浆、工程垃圾、拆除垃圾和装修类垃圾等的总称,包括新建、扩建、改建和拆除各种建筑物、构筑物、管网等以及居民装饰装修房屋过程中所产生的弃土、弃料及其他废弃物等。随着城市更新进程的不断发展,大规模建筑活动产生巨量建筑垃圾,加重了资源浪费、环境污染及城市容貌损坏等系列问题,对建筑垃圾有效处理能够减轻资源短缺、环境污染及市容破坏,促进建筑行业的可持续发展。针对建筑垃圾堆放点体量估算问题,近年来采用全站仪、gnss rtk接收机或激光雷达等技术手段获取堆体表面一定密度的三维坐标点,或利用无人机获得影像数据,然后利用dtm法、方格网法、等高线、断面法等方法计算体量,在适用性和精度指标方面各有优势。但是现有的技术,在保持精度的情况下如何实现对建筑垃圾堆放点体量估算的动态监测与管理仍有不足。
技术实现要素:
3.本发明鉴于现有技术的问题,用以解决现有技术中存在的一项或更多项的问题,至少提供一种有益的选择。
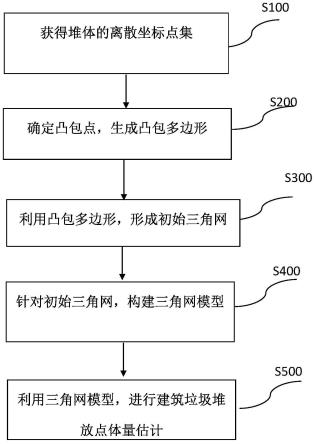
4.依据本发明的一个方面,提供了一种建筑垃圾堆放点体量估计方法,包括以下步骤:获得堆体的离散坐标点集;针对所述离散坐标点集,确定凸包点,生成凸包多边形;利用所述凸包多边形,形成初始三角网;针对初始三角网,构建三角网模型,以及利用所述三角网模型,进行建筑垃圾堆放点体量估计。
5.根据本发明的另一方面,提供了一种建筑垃圾堆放点体量估计装置,包括:离散坐标点获取单元,用于获得堆体的离散坐标点集;凸包多边形生成单元,针对所述离散坐标点集,确定凸包点,生成凸包多边形;三角网生成单元,利用所述凸包多边形,形成初始三角网;三角网模型构建单元,针对初始三角网,构建三角网模型;以及堆放点体量估计单元,利用所述三角网模型,进行建筑垃圾堆放点体量估计。
6.依据本发明的再一方面,提供了一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现本发明的方法。
7.依据本发明的再一方面,提供了一种计算机可读存储介质,该可读存储介质上存储设备控制程序,当所述设备控制程序被处理器执行时,实现本发明的方法。
8.根据本发明的实施方式,由于离散坐标点的数据采集手段呈现多样化趋势,例如gnss rtk可以实时获得离散坐标点数据,利用本技术方案可以实时估计建筑垃圾堆放点体量变化的动态估计结果,因而可以在保持精度的情况下实现对建筑垃圾的动态监测与管理。
附图说明
9.结合附图可以更好地理解本发明。附图只是示意性的,不是对本发明的保护范围的限制。
10.图1是示出了依据本发明的一种实施方式的建筑垃圾堆放点体量估计方法的示意性流程图。
11.图2示出了根据一种实施方式的顶点查找和删除的示意图。
12.图3示出了依据递归方法查找凸包点的示意图。
13.图4示出了依据本发明的一种实施方式的生成初始三角网的示意性流程图。
14.图5示出了当2个顶点高程均小于基准高程而1个顶点高程大于基准高程时的填方和挖方的示意图。
15.图6示出了当2个顶点高程均大于基准高程而1个顶点高程小于基准高程时的填方和挖方的示意图。
16.图7是示出了依据本发明的一种实施方式的建筑垃圾堆放点体量估计装置的示意性方框图。
具体实施方式
17.下面结合附图对本发明的具体实施方式进行说明。这些说明都是示例性的,旨在使本领域技术人员能够实现本发明的实施方式,不是对本发明的保护范围的限制。说明中也没有描述对于实际实施不可缺少,但是对于理解本发明无关的内容。
18.图1是示出了依据本发明的一种实施方式的建筑垃圾堆放点体量估计方法的示意性流程图。如图1所示,依据本发明的一种实施方式,依据本发明的建筑垃圾堆放点体量估计方法首先在步骤s100,获得堆体的离散坐标点集p={p1,p2,...,pn}。可以通过由全站仪、gnss rtk接收机、三维激光扫描仪等中的一种或任意组合采集得到建筑垃圾堆放点的离散坐标点,从而获得离散坐标点集。假设p(x,y,h)是离散坐标点集p={p1,p2,...,pn}上任意碎部测量点。建筑垃圾堆放点形状极不规则,碎部测量点就是需要进行测量的点,一般是建筑垃圾堆体起伏变化的转折点。
19.然后,在步骤s200,针对该离散坐标点集,确定凸包点,生成凸包多边形。
20.根据一种实施方式,首先在该离散坐标点集中查找并删除四个顶点,从而形成新的点集p’。根据一种实施方式,首先遍历点集p,在p中查找上下左右4个顶点,其中x最小为pxmin,y最大为pymax,x最大为pxmax,y最小为pymin。然后,顺时针或逆时针连接所述上下左右四个顶点形成4条边,分别为pxmin-pymax、pymax-pxmax、pxmax-pymin和pymin-pxmin,将上下左右4个顶点从原点集p中删除进而形成新的点集p’。图2示出了根据该方法的顶点查找和删除的示意图。
21.根据一种实施方式,首先依次连接该上下左右4个顶点形成四条边,然后利用递归法求出凸包点。例如,假定pymin-pxmax为第一条边,pymin为该第一条边的起点,在查找pymin-pxmax边左侧(外侧的示例)的凸包点时,从新的点集p’中找到位于pymin-pxmax边左侧的所有碎部测量点,将其从点集p’中删除并归入到集合leftpoints(外侧点集合的示例)中,并对集合leftpoints作如下判断:
22.a.若该外侧点集合为非空集,则在该外侧点集合中查找距离该边最远的点fp,将
该最远的点fp确定为凸包点,并将所述凸包点fp归入凸包点集c中,将所述凸包点fp点从所述新的点集中删除,并由所述最远的点fp和该第一条边的逆时针方向一个顶点形成新边;采用递归方法以此类推,在该新边的外侧继续查找新的凸包点fp’,并将查找出来的新的凸包点归入凸包点集c中,将该新的凸包点从所述新的点集中删除;
23.b.若该外侧点集合为空集,则将该第一条边的顺时针方向的顶点归入凸包点集c;
24.然后,针对所述四条边中的其余边,利用上述步骤的方法查找出剩余的凸包点,并将凸包点归入集合c中,将确定的凸包点从所述新的点集中删除,最后连接相邻的凸包点生成凸包多边形。
25.接着,在步骤s300,利用所述凸包多边形,形成初始三角网。
26.根据一种实施方式,将所述新的点集中任意选取某一个离散坐标点作为待插点从所述新的点集中取出,与凸包多边形的每个凸包点相连,生成多个三角形,将生成的三角形加入三角形列表集t中,利用该三角形列表集t,按照选取的待插点与所有的凸包点相连,形成初始三角网。
27.根据另一种实施方式,从点集p’中随机取出1个待插点p,与凸包多边形的每个凸包点相连,生成多个三角形,将生成的三角形加入三角形列表集t中,然后利用三角形列表集t形成三角网。图4示出了依据本发明的一种实施方式的生成三角网的示意性流程图。如图4所示,根据一种实施方式,首先,在步骤s310,计算由凸包点集c={c1,c2,
…
,cm}构成的平面的平面几何中心坐标:
[0028][0029]
式中,(xc,yc)为由凸包点集c={c1,c2,
…
,cm}构成的平面几何中心坐标;为凸包点集c中第i个凸包点的平面坐标,其中,i=1,2,
…
,m。
[0030]
然后,在步骤s320,对新的点集p’中所有离散点进行遍历,计算距离平面几何中心(xc,yc)最近的点,作为待插点,记为p
x
,即:
[0031]
p
x
=p
′iꢀꢀꢀ
(2)
[0032]
式中,p
′i满足
[0033]
px是p’点集中的每次选取待插点,i为待插点顺序。
[0034]
接着,在步骤s330,将p
x
作为待插点从点集p’中取出,与凸包多边形的每个凸包点相连,生成多个三角形,将生成的三角形加入三角形列表集t中。
[0035]
最后,在步骤s440,重复以上步骤s320和s330,然后利用该三角形列表集t,按照选取的待插点与所有的凸包点相连,形成三角网。
[0036]
根据又一种实施方式,利用凸包多边形形成初始三角网的步骤包括:
[0037]
利用下式计算由凸包点集c={c1,c2,
…
,cm}构成的空间的三维几何中心坐标:
[0038][0039]
式中,(xc,yc,hc)为由凸包点集c={c1,c2,
…
,cm}构成的空间的三维几何中心坐
标;为凸包点集c中第i个凸包点的三维坐标,其中,i=1,2,
…
,m;
[0040]
对所述新的点集中所有离散坐标点进行遍历,计算距离三维几何中心(xc,yc,hc)最远的点,作为待插点,记为p
x
,即:
[0041]
p
x
=p
′iꢀꢀꢀ
(4)
[0042]
式中,p
′i满足其中,为所述新的点集中某个离散坐标点p
′i的三维坐标;接着,将p
x
作为待插点从所述新的点集中取出,与凸包多边形的每个凸包点相连,生成多个平面三角形,将生成的平面三角形加入三角形列表集t中,利用该三角形列表集t形成三角网。
[0043]
然后在步骤s400,针对初始三角网,构建三角网模型。根据一种实施方式,如下地构建三角网模型:
[0044]
a.按顺序从所述三角形列表集t中取出一个三角形δabc,设其顶点为a(x1,y1)、b(x2,y2)和c(x3,y3),并计算三角形δabc外接圆的圆心o(x0,y0)及其半径r;
[0045]
b.判断所述待插点p
x
是否在三角形δabc外接圆的内部,如果p
x
点在三角形δabc外接圆的内部,则将所述三角形δabc剪切到新三角形列表t
′
中;
[0046]
c.重复步骤b,直到三角形列表集t中全部三角形遍历完毕;
[0047]
d.在新三角形列表t
′
的三角形中寻找所有公共边,并删除这些公共边,再将剩下的边加入到边列表集s中,清空新三角形列表t
′
;
[0048]
e.将边列表集s中的每条边的端点与待插点p
x
点连接,得到多个新的三角形,并将新三角形添加到新三角形列表t
′
中,清空s。
[0049]
f.重复以上步骤,直至所述新的点集p
′
中所有点作为待插点被遍历完毕,由新三角形列表t
′
构成三角网模型。
[0050]
接着,在步骤s500,进行堆放点体量估算。
[0051]
根据一种实施方式,进行堆放点体量估计的步骤包括计算平衡高程的步骤,可以如下地确定平衡高程:
[0052]
设三角形集合k={1,2,
…
,j,
…
,m},三角形j由,m},三角形j由和三个顶点组成,基于集合k计算的平衡高程为:
[0053][0054]
式中,he为平衡高程;m为三角形个数;为三角形j的三个顶点高程平均值,sj为三角形j投影至底面的平面面积,即:
[0055][0056]
根据一种实施方式,可以如下进行堆放点体量估计:
[0057]
基于基准高程设计为h0,对于各三角形j的体积估算值分以下情况:
[0058]
(1)若三个顶点高程均小于h0,对于三角形j的体积估算结果为其中为全填方体积估算值;若三个顶点高程均大于h0,对于三角形j的体积估算值为其中为全挖方体积估算值;
[0059]
(2)若两个顶点高程均小于h0而第三个顶点高程大于h0,并假设l1为ab边上高程等于h0的临界点,l2为ac边上高程等于h0的临界点,l1和l2的平面坐标通过线性内插计算获得,
[0060]
l1的平面坐标计算如下地确定为:
[0061][0062]
l2的平面坐标计算如下地确定为:
[0063][0064]
并设l1和l2坐标分别表示为(x
l1
,y
l1
,h0)和(x
l2
,y
l2
,h0),对于三角形j的体积估算值为:
[0065][0066]
反之,若两个顶点高程均大于h0而第三个顶点高程小于h0,对于三角形j的体积估算值为:
[0067][0068]
最后,将集合k中所有的三角形体积估算值进行累和运算,获得方量估算结果。
[0069]
图5示出了当2个顶点高程均小于基准高程而1个顶点高程大于基准高程时的填方和挖方的示意图。图6示出了当2个顶点高程均大于基准高程而1个顶点高程小于基准高程时的填方和挖方的示意图。
[0070]
根据式(5)或式(7)计算集合t中所有三角形对应的挖方或填方,并进行累和获得总方量。
[0071]
图7是示出了依据本发明的一种实施方式的建筑垃圾堆放点体量估计装置的示意
性方框图。
[0072]
如图7所示,依据本发明的一种实施方式的建筑垃圾堆放点体量估计装置10包括:离散坐标点获取单元100,用于获得堆体的离散坐标点集;凸包多边形生成单元200,针对所述离散坐标点集,确定凸包点,生成凸包多边形;三角网生成单元300,利用所述凸包多边形,形成初始三角网;三角网模型构建单元400,针对初始三角网,构建三角网模型;以及堆放点体量估计单元500,利用所述三角网模型,进行堆放点体量估计。
[0073]
各单元在实现各自功能时,可以参见上文对方法的描述。例如三角网生成单元300,利用上文对步骤s300描述的步骤和方法利用所述凸包多边形,形成初始三角网。三角网模型构建单元400利用上文对步骤s400的描述的步骤和方法来构建三角网模型。堆放点体量估计单元500利用上文对步骤s500说明的方法和步骤来实现堆放点体量估计。
[0074]
本领域技术人员容易理解,可以利用以上对方法的说明来理解本发明的装置。
[0075]
本领域技术人员容易理解,本发明的方法还可以包括与本发明的装置所完成的功能对应的其他步骤。以上的这些步骤也可以进行精简。
[0076]
本发明对单元和步骤的标号仅仅是为了说明的方便,除非上下文中有相反的说明,否则不代表其执行的顺序。
[0077]
本领域的技术人员应该理解,上述的各单元可以由软件或专门的硬件来实现,例如现场可编程门阵列、单片机、或微芯片等,或者也可以通过软件结合硬件的方式来实现。
[0078]
本发明还提供了一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现本发明的方法。
[0079]
本发明还涉及一种计算机软件,该计算机软件在被计算装置(例如单片机、电脑、cpu等)执行时,可以实现本发明的方法。
[0080]
本发明还涉及一种计算机软件存储装置,例如硬盘、软盘、闪存等,该计算机软件存储装置存储有上述的计算机软件。
[0081]
本发明对方法或步骤的说明可以用于理解对单元或装置的说明,对单元或装置的说明也可以用于理解本发明的方法或步骤。以上说明仅仅是示意性的,不是对本发明的保护范围的限制,在本发明的构思范围内的任何改变、替换均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1